This is the official implementation of our paper:
BundleTrack: 6D Pose Tracking for Novel Objects without Instance or Category-Level 3D Models
accepted in International Conference on Intelligent Robots and Systems (IROS) 2021.
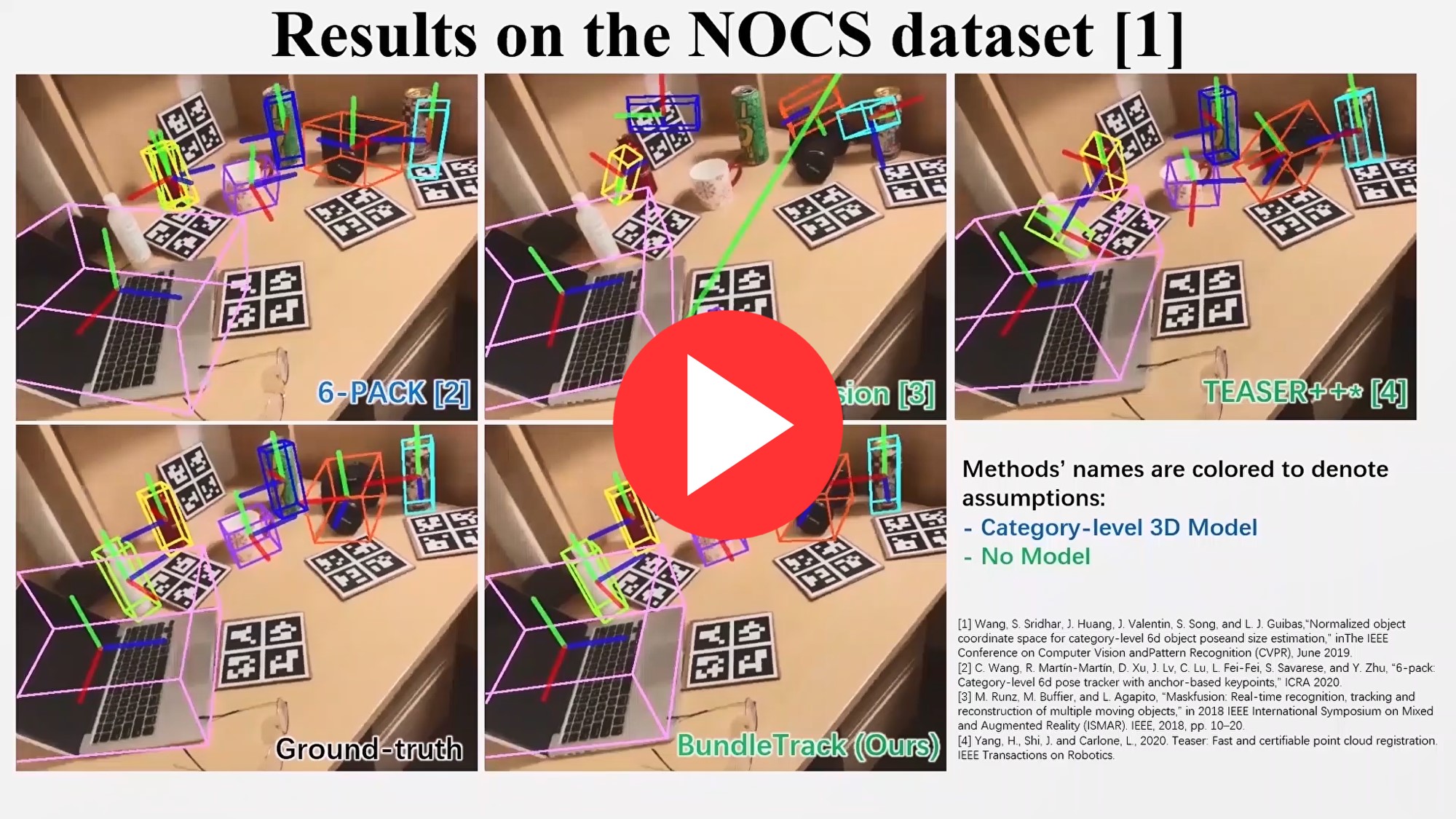
Most prior 6D object pose tracking often assume that the target object's CAD model, at least at a category-level, is available for offline training or during online template matching. This work proposes BundleTrack, a general framework for 6D pose tracking of novel objects, which does not depend upon 3D models, either at the instance or category-level. It leverages the complementary attributes of recent advances in deep learning for segmentation and robust feature extraction, as well as memory-augmented pose graph optimization for spatiotemporal consistency. This enables long-term, low-drift tracking under various challenging scenarios, including significant occlusions and object motions. Comprehensive experiments given two public benchmarks demonstrate that the proposed approach significantly outperforms state-of-art, category-level 6D tracking or dynamic SLAM methods. When compared against state-of-art methods that rely on an object instance CAD model, comparable performance is achieved, despite the proposed method's reduced information requirements. An efficient implementation in CUDA provides a real-time performance of 10Hz for the entire framework.


This repo can be readily applied to 6D pose tracking for novel unknown objects. For CAD model-based 6D pose tracking, please check out my another repository of se(3)-TrackNet
@inproceedings{wen2021bundletrack,
title={BundleTrack: 6D Pose Tracking for Novel Objects without Instance or Category-Level 3D Models},
author={Wen, B and Bekris, Kostas E},
booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems},
year={2021}
}Click to watch
Click to watch


For convenience of benchmarking and making plots, results of pose outputs can be downloaded below
- For NOCS Dataset: https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/nocs_ours_results_iros2021.tar.gz
- For YCBInEOAT: https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/ycbineoat_ours_results.tar.gz
For the environment setup, it's strongly recommended to use our provided docker environment (setting up from scratch is very complicated and not supported in this repo). For this, you don't have to know how docker works. Only some basic commands are needed and will be provided in the below steps.
-
Install docker (https://docs.docker.com/get-docker/).
-
Run
docker pull wenbowen123/bundletrack:latest docker pull wenbowen123/lf-net-release-env:latest -
Download neural network weights
- Download https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/indoor.tar.gz, extract and put it under
lf-net-release/release/models, so it'll belf-net-release/release/models/indoor/... - Download https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/pretrained.tar.gz, extract and put it under
./transductive-vos.pytorch, so it'll be./transductive-vos.pytorch/pretrained/...
- Download https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/indoor.tar.gz, extract and put it under
-
Edit the docker/run_container.sh, update the paths of
BUNDLETRACK_DIR,NOCS_DIRandYCBINEOAT_DIR -
Run
bash docker/run_container.sh -
cd [PATH_TO_BUNDLETRACK] -
rm -rf build && mkdir build && cd build && cmake .. && make -
Download masks from https://archive.cs.rutgers.edu/archive/a/2021/pracsys/2021_iros_bundletrack/masks.tar.gz, extract and put in the repo so it becomes
masks/...
-
Download NOCS Dataset from http://download.cs.stanford.edu/orion/nocs/real_test.zip, then put it under a folder named "NOCS". And download the addon from https://drive.google.com/file/d/1BknMsoRKRV-nhLDpozog2Lrz1OWTKqkM/view?usp=sharing. Finally unzip the files and make sure the path structure is like this:
NOCS ├── NOCS-REAL275-additional └── real_test -
Open a separate terminal and run
bash lf-net-release/docker/run_container.sh cd [PATH_TO_BUNDLETRACK] python lf-net-release/run_server.py -
Go back to the terminal where you launched the bundletrack docker in above
python scripts/run_nocs.py --nocs_dir [PATH_TO_NOCS] --scene_id 1 --port 5555 --model_name can_arizona_tea_norm -
Finally, the results will be saved in
/tmp/BundleTrack/ -
For evaluating on the entire NOCS Dataset (by default this will add perturbation to the initial ground-truth pose), run
python scripts/eval_nocs.py --nocs_dir [PAHT TO NOCS] --results_dir [PATH TO THE RUNNING OUTPUTS]
-
Download YCBInEOAT from https://archive.cs.rutgers.edu/archive/a/2020/pracsys/Bowen/iros2020/YCBInEOAT/
-
Open a separate terminal and run
bash lf-net-release/docker/run_container.sh cd [PATH_TO_BUNDLETRACK] python lf-net-release/run_server.py -
Go back to the terminal where you launched the bundletrack docker in above, and run
python scripts/run_ycbineoat.py --data_dir [PATH_TO_YCBInEOAT] --port 5555 --model_name [The YCB object's name, e.g. 021_bleach_cleanser] -
Finally, the results will be saved in
/tmp/BundleTrack/ -
For evaluating on the entire YCBInEOAT Dataset, run
python scripts/eval_nocs.py --ycbineoat_dir [PAHT TO YCBINEOAT] --ycb_model_dir [YCB MODELS FOLDER] --results_dir [PATH TO THE RUN OUTPUTS]
-
Download YCBInEOAT, if you haven't done so in above.
-
Open a separate terminal and run
bash lf-net-release/docker/run_container.sh cd [PATH_TO_BUNDLETRACK] python lf-net-release/run_server.py -
Prepare segmentation masks. In YCBInEOAT Dataset, we computed masks from robotic arm forward kinematics. If your scene is not too complicated similar to NOCS Dataset, you can run the video segmentation network to get masks as below:
-
First you need to prepare an initial mask (grayscale image, where 0 means background, else foreground).
-
python transductive-vos.pytorch/run_video.py --img_dir [THE PATH TO COLOR FILES] --init_mask_file [THE INITIAL MASK FILE YOU PREPARED ABOVE] --mask_save_dir [WHERE TO SAVE] -
Prepare your folder structure same as any folder (e.g. "mustard_easy_00_02") in YCBInEOAT Dataset. Put it under the same directory in YCBInEOAT, i.e. next to "mustard_easy_00_02". Then edit
config_ycbineoat.ymlto make sure the paths at top are right.Structure:
mustard_easy_00_02 ├── rgb ├── masks ├── depth └── cam_K.txt
-
-
Go back to the terminal where you launched the bundletrack docker, run
python scripts/run_ycbineoat.py --data_dir [PATH TO YOUR FOLDER ABOVE] --port 5555