
- Load the 2.5D map in the colliders.csv file describing the environment.
- Discretize the environment into a grid or graph representation.
- Define the start and goal locations.
- Perform a search using A* or other search algorithm.
- Use a collinearity test or ray tracing method (like Bresenham) to remove unnecessary waypoints.
- Return waypoints in local ECEF coordinates (format for
self.all_waypointsis [N, E, altitude, heading], where the drone’s start location corresponds to [0, 0, 0, 0]. - Write it up.
- Congratulations! Your Done!
Rubric Points
Here I will consider the rubric points individually and describe how I addressed each point in my implementation.
1. Provide a Writeup / README that includes all the rubric points and how you addressed each one. You can submit your writeup as markdown or pdf.
You're reading it! Below I describe how I addressed each rubric point and where in my code each point is handled.
These scripts contain a basic planning implementation that including:
- motion_planning
- MotionPlanning
- Responsible for planning navigation (waypoints)
- Implements state positions, transitions, and callbacks
- plan_path
- Imports longitude and latitude for 2.5D map global positions from .csv
- Identifies obstacles and creates a grid
- Defines end goal position
- Calculates ideal path using A*
- Navigates to path while avoiding obstacles
- MotionPlanning
- planning_utils
- Source file for defining functions related to:
- Finding the goal
- Creating the grid
- Defining locations
- Validating actions
- Creating a path for A*
- Source file for defining functions related to:
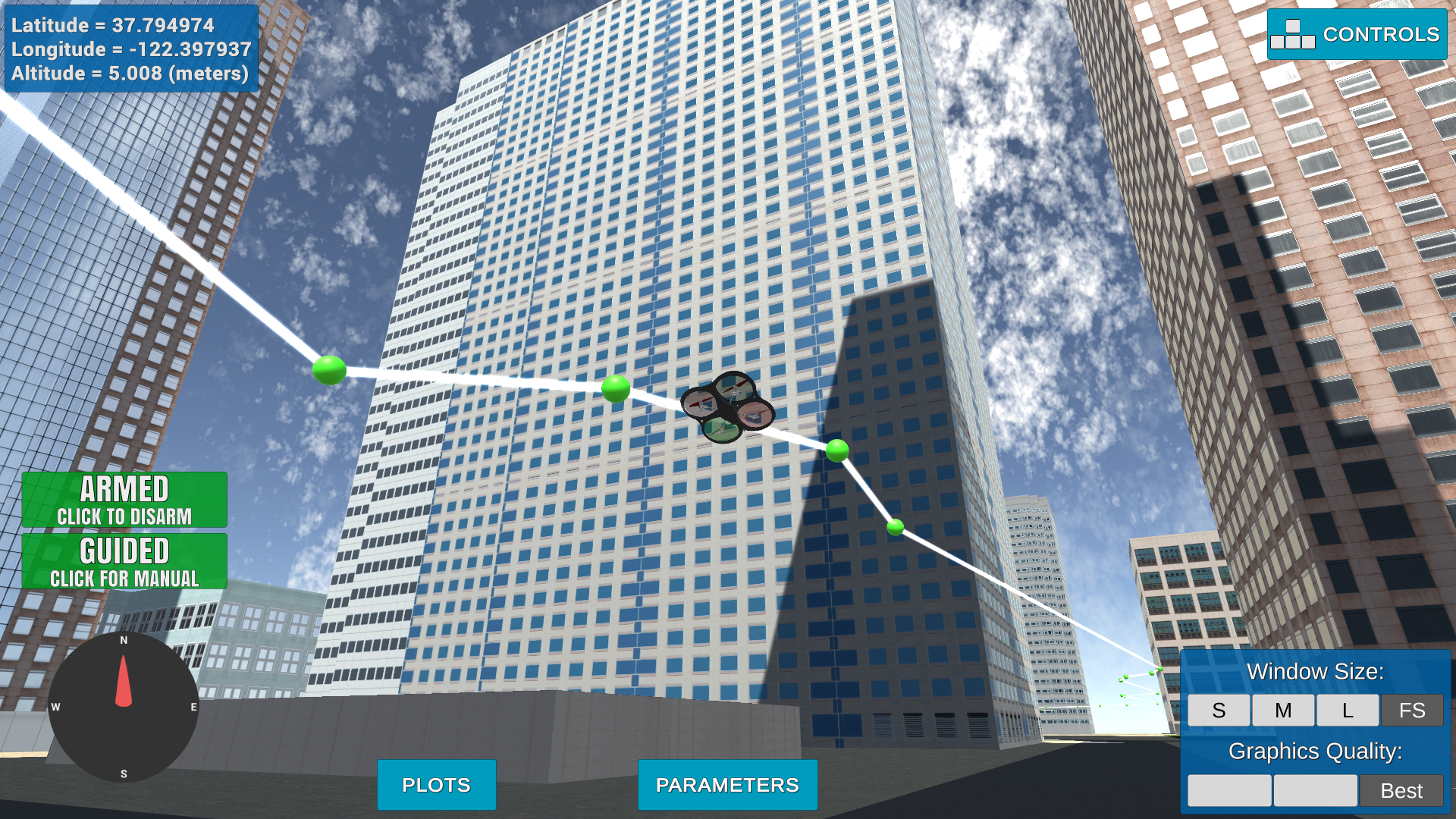
...and here's a lovely image from Udacity!

Downtown San Francisco was designed in Unity as a realistic environment.

The csv file is has the initial latitude and longitude as the first entry. This data is then loaded into the program.
with open('colliders.csv') as f:
origin_pos_data = f.readline().split(',')
lat0 = float(origin_pos_data[0].strip().split(' ')[1])
lon0 = float(origin_pos_data[1].strip().split(' ')[1])Defining the local position relative to global home is an intuitive task. This can be completed similar to the following:
# Set home position to (lon0, lat0, 0)
self.set_home_position(lon0, lat0, 0)
# Tetrieve current global position
global_pos_current = [self._longitude, self._latitude, self._altitude]
# Convert to current local position using global_to_local()
local_pos_current = global_to_local(global_pos_current, self.global_home)

Simple enough, just initialize the grid with the given offsets.
grid_start = (int(local_pos_current[0] -north_offset),
int(local_pos_current[1] -east_offset))
Latitude and longitude can be changed to any value (bounded, obviously) within the map and have it rendered to a goal location on the grid.
global_goal = (-122.39827335, 37.79639627, 0)
local_goal = global_to_local(global_goal, self.global_home)
grid_goal = (int(local_goal[0] - north_offset),
int(local_goal[1] - east_offset))Now, some adjustments need to be done to the planning_utils.py file. More specicially, to implement a root2 function, we can add some additional coordinate parameters and check them:
WEST = (0, -1, 1)
EAST = (0, 1, 1)
NORTH = (-1, 0, 1)
SOUTH = (1, 0, 1)
NE = (-1, 1, np.sqrt(2))
NW = (-1, -1, np.sqrt(2))
SE = (1, 1, np.sqrt(2))
SW = (1, -1, np.sqrt(2))
................................................................................
if x - 1 < 0 or grid[x - 1, y] == 1:
valid_actions.remove(Action.NORTH)
if x + 1 > n or grid[x + 1, y] == 1:
valid_actions.remove(Action.SOUTH)
if y - 1 < 0 or grid[x, y - 1] == 1:
valid_actions.remove(Action.WEST)
if y + 1 > m or grid[x, y + 1] == 1:
valid_actions.remove(Action.EAST)
if x - 1 < 0 or y + 1 < 0 or grid[x - 1, y + 1] == 1:
valid_actions.remove(Action.NE)
if x - 1 < 0 or y - 1 < 0 or grid[x - 1, y - 1] == 1:
valid_actions.remove(Action.NW)
if x + 1 < 0 or y + 1 < 0 or grid[x + 1, y + 1] == 1:
valid_actions.remove(Action.SE)
if x + 1 < 0 or y - 1 < 0 or grid[x + 1, y - 1] == 1:
valid_actions.remove(Action.SW)Now, the default A* feature can be implemented.
if current_node == goal:
print('Found a path.')
found = True
break
else:
for action in valid_actions(grid, current_node):
# get the tuple representation
da = action.delta
next_node = (current_node[0] + da[0], current_node[1] + da[1])
branch_cost = current_cost + action.cost
queue_cost = branch_cost + h(next_node, goal)
if next_node not in visited:
visited.add(next_node)
branch[next_node] = (branch_cost, current_node, action)
queue.put((queue_cost, next_node))
................................................................................
print('Local Start and Goal: ', grid_start, grid_goal)
path, _ = a_star(grid, heuristic, grid_start, grid_goal)...but why stop there when using Blum's Medial Axis version of A* can be used with the topological skeletons! (Remember to use the skimage.morphology library)
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3663081/
# A* == Medial
topological_skeleton = medial_axis(invert(grid))
adjacent_grid_start, adjacent_grid_goal =
find_goal(topological_skeleton, grid_start, grid_goal)Hey! It looks like we got something!

It was recommended to use a collinearity test or ray tracing (Bresenham's method) to prune superfluous waypoints. This is achieved by characterizing points based on the line-of-sight of the path to the goal and eliminating unnecessary waypoints. This increases the efficiency and performance of the system, as the drone has a protocol to follow all compulsory waypoints precisely, which can be problematic when the simple program causes the drone to "overshoot" its trajectory (which causes oscillations when reorienting).
Thus, a path pruning feature was defined in the planning_utils:
def path_pruning(path):
prune_path = [p for p in path]
i = 0
prune_count = 0
while i < len(prune_path) - 2:
p1 = point(prune_path[i])
p2 = point(prune_path[i+1])
p3 = point(prune_path[i+2])
# Remove superfluous points
if collinearity_check(p1, p2, p3):
prune_path.remove(prune_path[i+1])
prune_count += 1
else:
i += 1
print('Pruning Path', prune_count)
return prune_pathIt works!
Double check that you've met specifications for each of the rubric points.
For an extra challenge, consider implementing some of the techniques described in the "Real World Planning" lesson. You could try implementing a vehicle model to take dynamic constraints into account, or implement a replanning method to invoke if you get off course or encounter unexpected obstacles.
Put all of these together and make up your own crazy paths to fly! Can you fly a double helix??

Okay, flying a double helix might seem like a silly idea, but imagine you are an autonomous first responder vehicle. You need to first fly to a particular building or location, then fly a reconnaissance pattern to survey the scene! Give it a try!