Data tells a story so let's find it!
Contained in the data below is all the information to reconstruct a fairly complex vehicle trajectory.
The data preprocessed from CSVs looks like this:
| timestamp | displacement | yaw_rate | acceleration |
|---|---|---|---|
| 0.0 | 0 | 0.0 | 0.0 |
| 0.25 | 0.0 | 0.0 | 19.6 |
| 0.5 | 1.225 | 0.0 | 19.6 |
| 0.75 | 3.675 | 0.0 | 19.6 |
| 1.0 | 7.35 | 0.0 | 19.6 |
| 1.25 | 12.25 | 0.0 | 0.0 |
| 1.5 | 17.15 | -2.82901631903 | 0.0 |
| 1.75 | 22.05 | -2.82901631903 | 0.0 |
| 2.0 | 26.95 | -2.82901631903 | 0.0 |
| 2.25 | 31.85 | -2.82901631903 | 0.0 |
| 2.5 | 36.75 | -2.82901631903 | 0.0 |
| 2.75 | 41.65 | -2.82901631903 | 0.0 |
| 3.0 | 46.55 | -2.82901631903 | 0.0 |
| 3.25 | 51.45 | -2.82901631903 | 0.0 |
| 3.5 | 56.35 | -2.82901631903 | 0.0 |
This data is currently saved in a file called trajectory_example.pickle. It can be loaded using a helper function.
Each entry in data_list contains four fields. Those fields correspond to timestamp (seconds), displacement (meters), yaw_rate (rads / sec), and acceleration (m/s/s).
timestamp - Timestamps are all measured in seconds. The time between successive timestamps (
displacement - Displacement data from the odometer is in meters and gives the total distance traveled up to this point.
yaw_rate - Yaw rate is measured in radians per second with the convention that positive yaw corresponds to counter-clockwise rotation.
acceleration - Acceleration is measured in
After processing this exact data, it's possible to generate this plot of the vehicle's X and Y position:
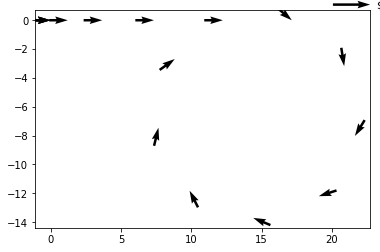
this vehicle first accelerates forwards and then turns right until it almost completes a full circle turn.
Making those cool arrows:
Take a processed data_list (with
-
get_speeds- returns a length$N$ list where entry$i$ contains the speed ($m/s$ ) of the vehicle at$t = i \times \Delta t$ -
get_headings- returns a length$N$ list where entry$i$ contains the heading (radians,$0 \leq \theta < 2\pi$ ) of the vehicle at$t = i \times \Delta t$ -
get_x_y- returns a length$N$ list where entry$i$ contains an(x, y)tuple corresponding to the$x$ and$y$ coordinates (meters) of the vehicle at$t = i \times \Delta t$ -
show_x_y- generates an x vs. y scatter plot of vehicle positions.
The vehicle always begins with all state variables equal to zero. This means x, y, theta (heading), speed, yaw_rate, and acceleration are 0 at t=0.