Orientation estimation using quaternions and the Error State Kalman Filter (ESKF). For detailed explanation of the implementation, see quaternion_eskf.pdf.
*scipy==0.19.1
matplotlib==2.1.1
numpy==1.13.3
*scipy is only required for running tests in rotation_utils.py and not needed for main.py
python3 main.py <dataset> [--update]
where <dataset> is (1-6, or custom). Adding the --update option will enable the update step.
-
Sensor data will be plotted, and sensor mean and average will be printed. Close window to continue.

-
Quaternion components (true, estimated, error), angular errors and diagonal components of (local/global) covariance will be plotted. The quaternion components will be shown with the update step if the --update option is given. Angular errors is shown with and without the update step if the --update option is given. Close windows to continue.



-
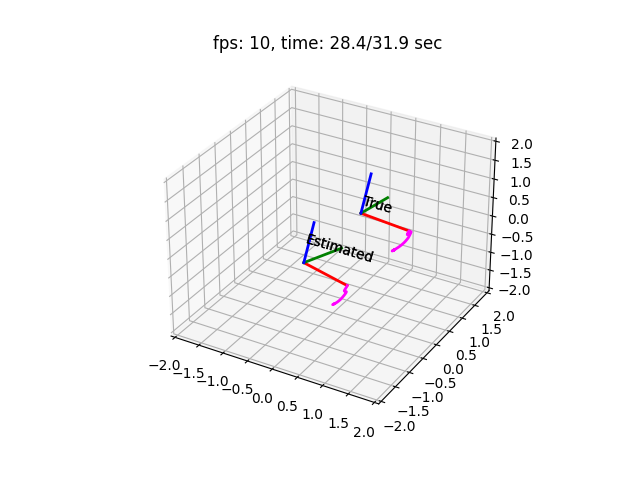
A 3D visualization will be displayed, with the estimated and true orientation.