-
링 및 표식의 픽셀 수를 이용해 드론 제어:
-
1,2,3단계 모두 표식의 픽셀 수를 이용해 표식과 드론 사이 거리를 조절한다.
-
1,2,3단계 모두 상하좌우 각 범위 내의 픽셀 수 비율을 이용해 드론의 상하좌우 위치를 조절한다.
-
2,3단계에서 천막의 상하좌우 비율을 맞춘 뒤에 표식을 탐색하는 전략으로 정확한 위치조절이 가능하다.
-
-
링 검출을 위한 드론 이동 전략:
-
천막의 상하/좌우 픽셀 수 비율이 비슷하도록 드론을 이동시켰다.
-
2,3단계에서 천막에 너무 가까우면 후진 후 다시 탐색하는 전략을 이용했다.
-
천막이 한 쪽에만 치우쳐있어 픽셀 수 비율이 너무 작으면 크게 이동, 적당히 작으면 작게 이동하는 방식으로 정확성과 속도를 높혔다.
-
-
천막이 안보이는 경우 해결 전략:
-
2단계에서 안보이는 경우: 드론을 좌우로 회전시키며 천막 탐색 -
3단계에서 안보이는 경우: 드론과 천막의 높이차가 커서 안보이는 경우에 대비해, 드론의 현재 높이를 누적계산해 높낮이 이동
-
-
3단계 각도 조절 전략:
-
2단계 통과 후 3단계 표식까지의 최적의 경로를 설정하기 위해 각도를 10도씩 돌리며 최적의 각도 탐색.
-
드론과 천막 간의 각도가 0도일 때가 최적의 각도이며, 이때의 천막 픽셀 수가 가장 많이 검출되므로 이를 이용해 각도를 제어한다.
-
- 코드 실행에 필요한 거리 저장 변수 선언
dist_forward = 0.3; % 대상에 접근하기 위해 전진하는 거리
dist_backward = 0.4; % 대상을 찾기 위해 후진하는 거리
dist_pass = 1.2; % 링 통과 후 90도 회전하고 전진하는 거리
Ddist_udlr = 0.2; % 점 방향으로 이동하기 위한 상하좌우 이동 거리
Rdist_udlr = 0.25; % 천막 방향으로 이동하기 위한 상하좌우 이동 거리
Rdist_add_forward = 0.5; % 천막 기준 올바르게 이동한 후 추가적으로 전진하는 거리
height = 1.0; % 드론의 현재 높이를 저장하는 변수- 드론 객체 선언 → 카메라 객체 선언 → 드론 이륙
droneObj = ryze();
cam = camera(droneObj);
takeoff(droneObj);원의 중심 높이(1m) - 드론 이륙 기본 높이(0.7m) => 추가 상승 (0.3m)
moveup(droneObj,'Distance', 0.3,'WaitUntilDone', true);
moveforward(droneObj, 'Distance', 1.2, 'WaitUntilDone', true);
frame = snapshot(cam); frame = rgb2hsv(frame); h = frame(:,:,1); detect_h = (h >= 0.2) & (h <= 0.42); s = frame(:,:,2); detect_s = (s >= 0.1) & (s <= 0.76); detect_Gdot = detect_h & detect_s; canny_img = edge(detect_Gdot, 'Canny', 0.9, 8); fill_img = imfill(canny_img, 'holes');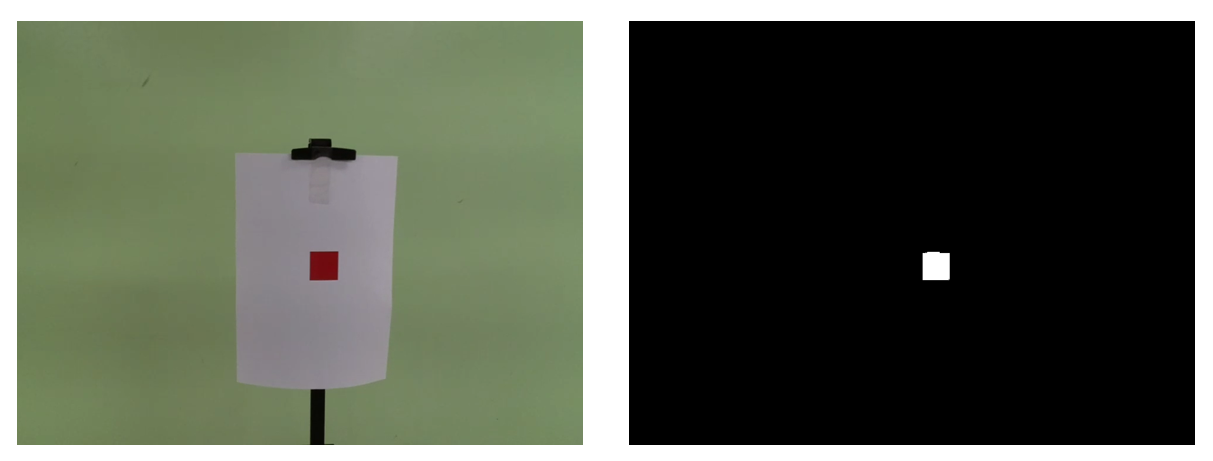
[0]: 후진 후 다시 초록색 표식 픽셀 추출 코드로 이동 if green_sum == 0 moveback(droneObj,'Distance', dist_backward,'WaitUntilDone', true); continue;
if green_sum == 0 moveback(droneObj,'Distance', dist_backward,'WaitUntilDone', true); continue;
[0~300]: 위치 이동 없이 직진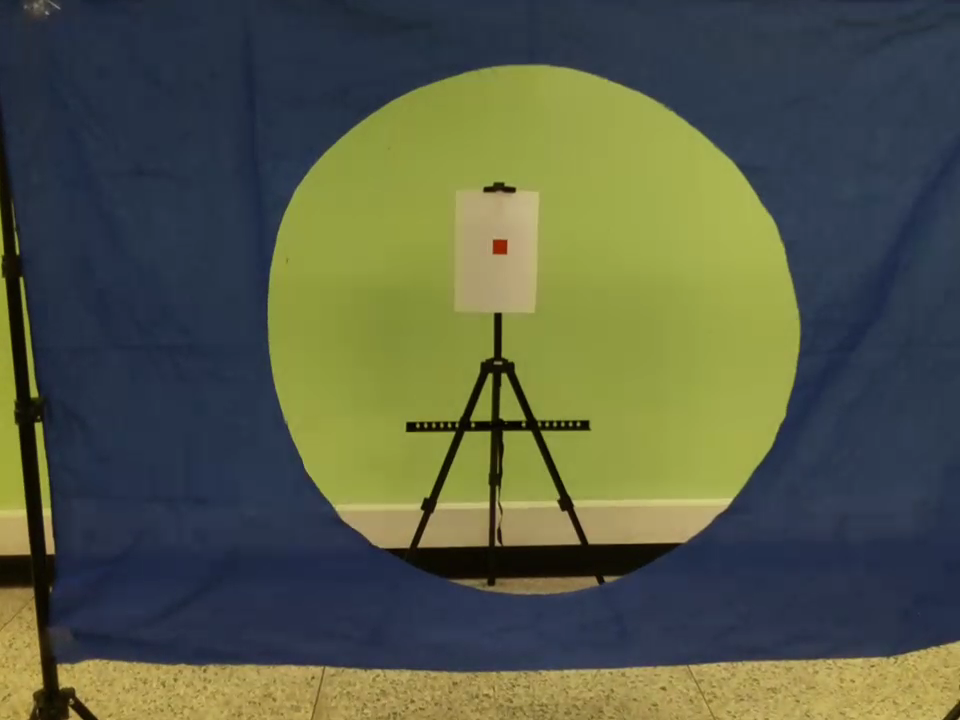
[300~2000]: detecting 변수 true로 변경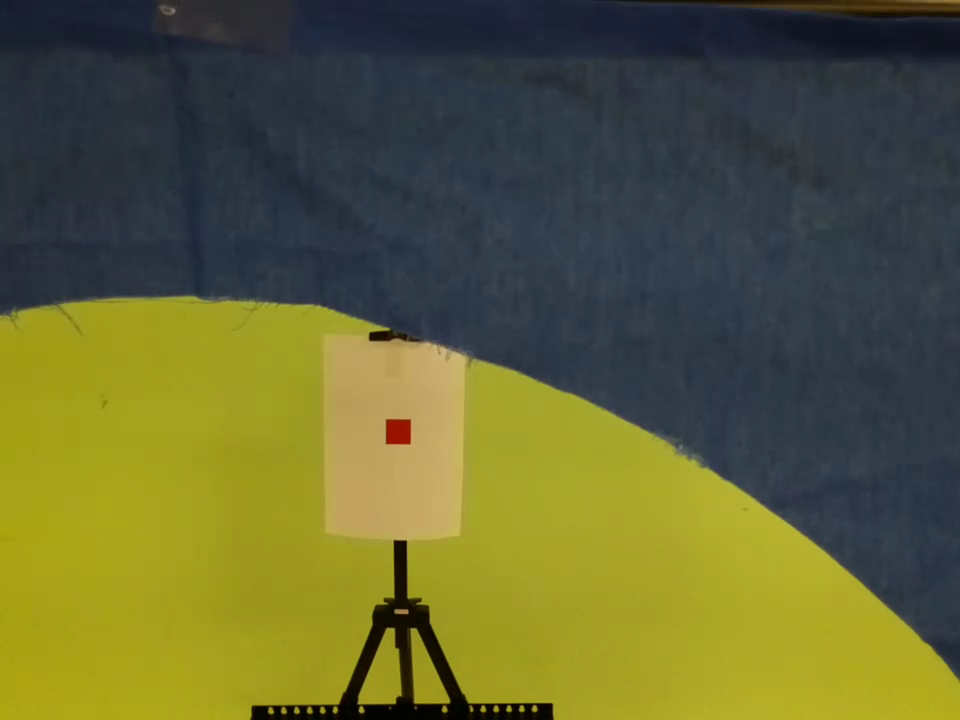 elseif green_sum >= 300 detecting = true;
elseif green_sum >= 300 detecting = true;
[2000~4000]: 표식의 위치가 중앙에 있지 않다면 detecting 변수 true로 변경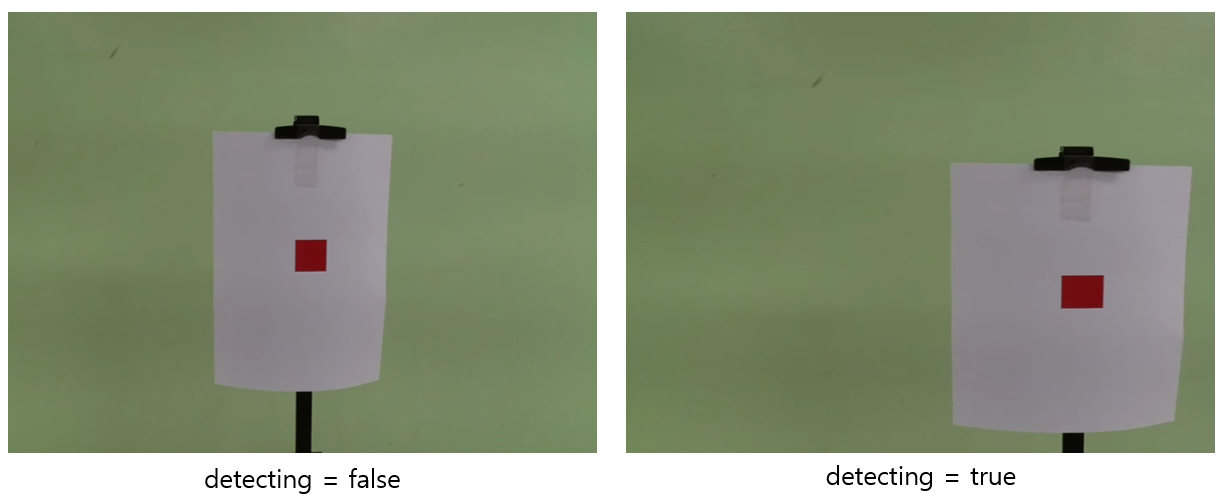 elseif green_sum >= 2000 r_center = sum(sum(detect_Rdot(fix(end/3):fix(end/3 * 2), fix(end/3):fix(end/3 * 2)))); if r_center < 2000 detecting = true; end
elseif green_sum >= 2000 r_center = sum(sum(detect_Rdot(fix(end/3):fix(end/3 * 2), fix(end/3):fix(end/3 * 2)))); if r_center < 2000 detecting = true; end
[4000~]: 90° turn → 1.2m 전진 → 반복문 탈출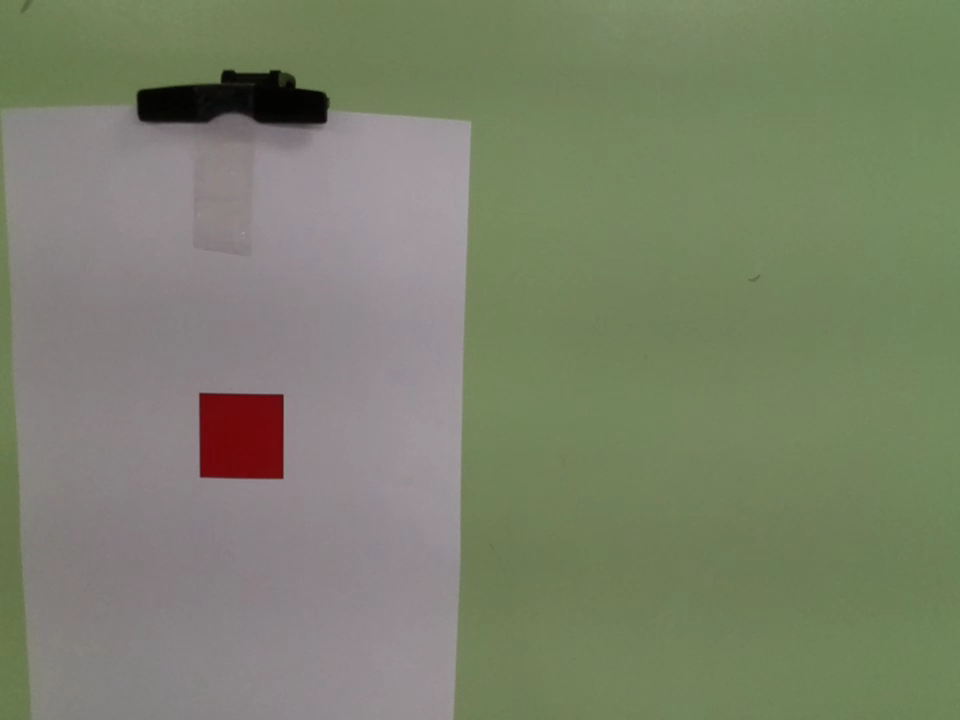 elseif green_sum >= 4000 turn(droneObj, deg2rad(90)); moveforward(droneObj, 'Distance', dist_pass, 'WaitUntilDone', true); findGreenDot = true;if (detecting) g_lst = [sum(sum(fill_img(1:fix(end/4*3), 1:end))) % 상 sum(sum(fill_img(fix(end/4):end, 1:end))) % 하 sum(sum(fill_img(1:end, 1:fix(end/3*2)))) % 좌 sum(sum(fill_img(1:end, fix(end/3):end)))]; % 우
elseif green_sum >= 4000 turn(droneObj, deg2rad(90)); moveforward(droneObj, 'Distance', dist_pass, 'WaitUntilDone', true); findGreenDot = true;if (detecting) g_lst = [sum(sum(fill_img(1:fix(end/4*3), 1:end))) % 상 sum(sum(fill_img(fix(end/4):end, 1:end))) % 하 sum(sum(fill_img(1:end, 1:fix(end/3*2)))) % 좌 sum(sum(fill_img(1:end, fix(end/3):end)))]; % 우상하 비율 비교 후 빨간색 픽셀이 더 많은 쪽으로 드론 이동 (좌우 비율 또한 동일한 원리로 작동)
if abs(g_lst(1) - g_lst(2)) > 100 if g_lst(1) >= g_lst(2) moveup(droneObj,'Distance', Ddist_udlr,'WaitUntilDone', true); else movedown(droneObj,'Distance', Ddist_udlr,'WaitUntilDone', true); end end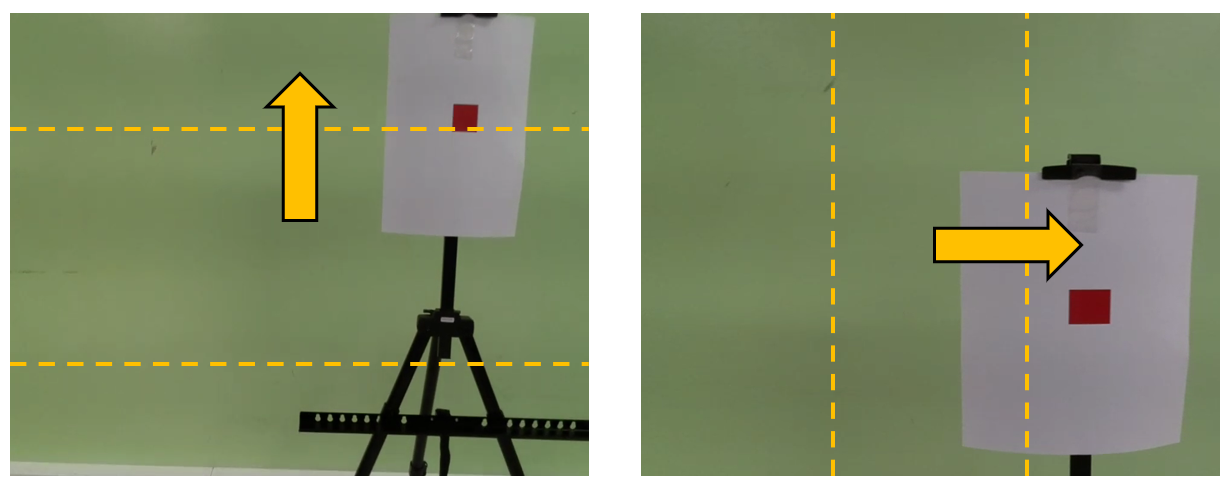







frame = snapshot(cam); r = frame(:,:,1); detect_r = (r < 50); g = frame(:,:,2); detect_g = (g > 10) & (g < 120); b = frame(:,:,3); detect_b = (b > 50) & (b < 190); detect_Brect = detect_r & detect_g & detect_b;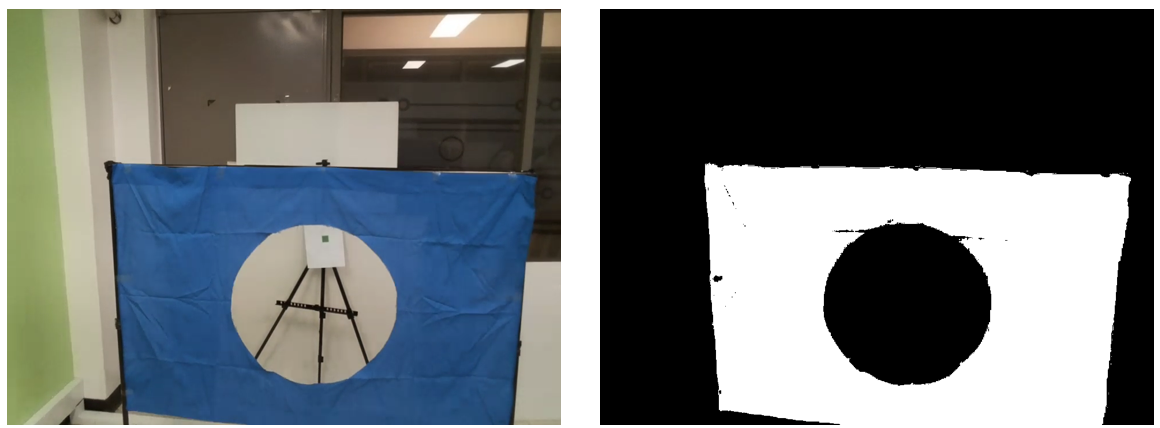
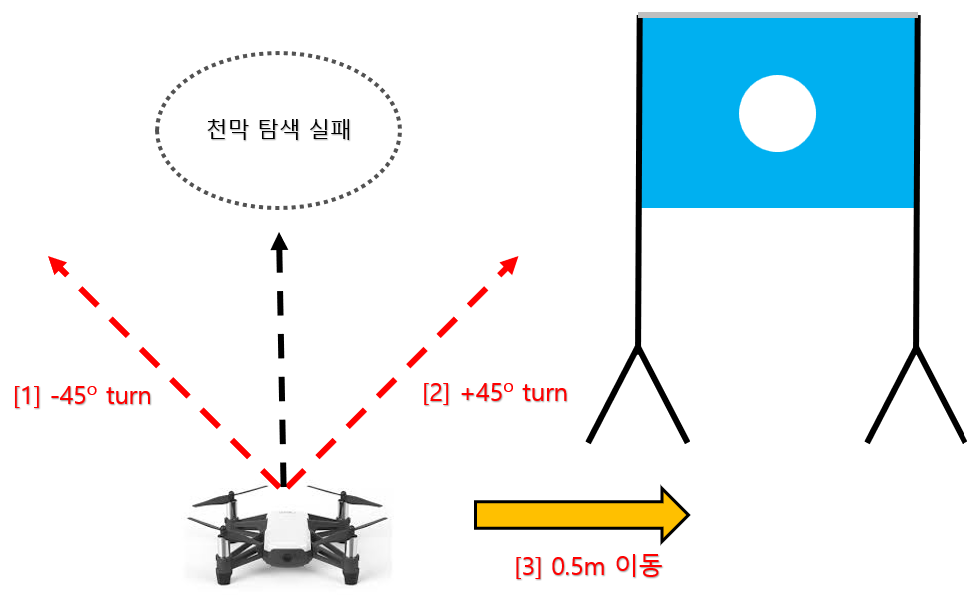
[1] 정면 기준 -45° turn → sum1 값 저장
turn(droneObj, deg2rad(-45)); frame = snapshot(cam); r = frame(:,:,1); detect_r = (r < 50); g = frame(:,:,2); detect_g = (g > 10) & (g < 120); b = frame(:,:,3); detect_b = (b > 50) & (b < 190); detect_Brect = detect_r & detect_g & detect_b; sum1 = sum(sum(detect_Brect));[2] 정면 기준 +45° turn → sum2 값 저장
turn(droneObj, deg2rad(90)); frame = snapshot(cam); r = frame(:,:,1); detect_r = (r < 50); g = frame(:,:,2); detect_g = (g > 10) & (g < 120); b = frame(:,:,3); detect_b = (b > 50) & (b < 190); detect_Brect = detect_r & detect_g & detect_b; sum2 = sum(sum(detect_Brect));[3] sum값이 더 큰 곳으로 0.5m 이동 후 파란색 천막 픽셀 추출 코드로 이동
turn(droneObj, deg2rad(-45)); if sum1 >= sum2 moveleft(droneObj, 'Distance', 0.5, 'WaitUntilDone', true); else moveright(droneObj, 'Distance', 0.5, 'WaitUntilDone', true); end continue;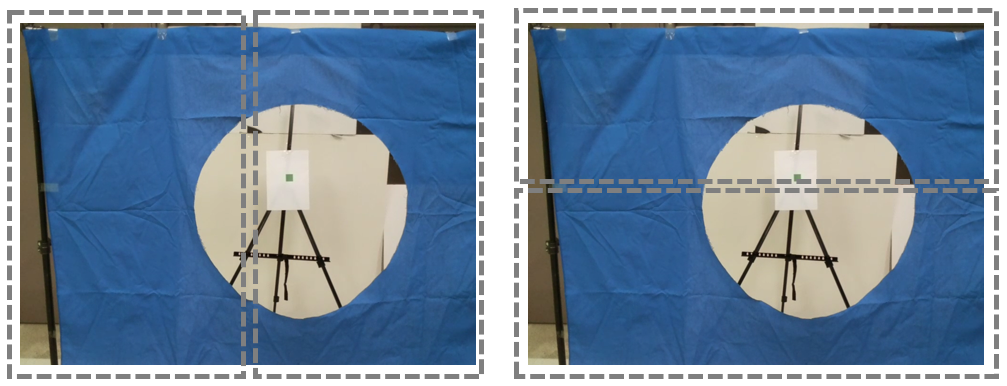 B_lst = [sum(sum(detect_Brect(1:fix(end/2), 1:end))) sum(sum(detect_Brect(fix(end/2):end, 1:end))) sum(sum(detect_Brect(1:end, 1:fix(end/2)))) sum(sum(detect_Brect(1:end, fix(end/2):end)))]; ratio1 = min(B_lst(1), B_lst(2)) / max(B_lst(1), B_lst(2)); % 상하 비율 ratio2 = min(B_lst(3), B_lst(4)) / max(B_lst(3), B_lst(4)); % 좌우 비율
B_lst = [sum(sum(detect_Brect(1:fix(end/2), 1:end))) sum(sum(detect_Brect(fix(end/2):end, 1:end))) sum(sum(detect_Brect(1:end, 1:fix(end/2)))) sum(sum(detect_Brect(1:end, fix(end/2):end)))]; ratio1 = min(B_lst(1), B_lst(2)) / max(B_lst(1), B_lst(2)); % 상하 비율 ratio2 = min(B_lst(3), B_lst(4)) / max(B_lst(3), B_lst(4)); % 좌우 비율
[올바른 비율 탐색 성공]: 0.4m 하강 → 0.8m 전진 → 반복문 탈출if((ratio1 >= 0.7) && (ratio2 >= 0.7)) movedown(droneObj, 'Distance', 0.4, 'WaitUntilDone', true); height = height - 0.4 moveforward(droneObj, 'Distance', 0.8, 'WaitUntilDone', true); findRightPos = true;
[올바른 비율 탐색 실패]:i) 현재 파란색 천막에 매우 근접한 상황이라면 후진한 후 위의 과정 반복
 b_center = sum(sum(detect_Brect(fix(end/3):fix(end/3 * 2), fix(end/3):fix(end/3 * 2)))); if b_center >= 70000 moveback(droneObj,'Distance', dist_backward,'WaitUntilDone', true);
b_center = sum(sum(detect_Brect(fix(end/3):fix(end/3 * 2), fix(end/3):fix(end/3 * 2)))); if b_center >= 70000 moveback(droneObj,'Distance', dist_backward,'WaitUntilDone', true);ii) 그렇지 않은 경우 파란색 픽셀이 많은 쪽으로 상하/좌우 이동
비율이 [~ 0.3]: 크게 이동(0.5m)
비율이 [0.3 ~ 0.7]: 작게 이동(0.25m)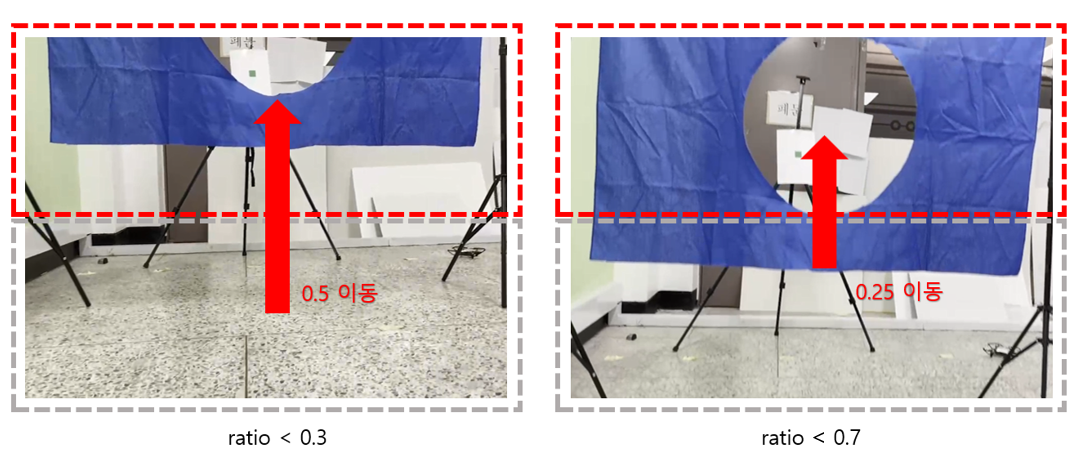 % 상하 이동 코드. (좌우 코드도 동일 방식) if ratio1 < 0.3 if B_lst(1) >= B_lst(2) moveup(droneObj,'Distance', Rdist_udlr * 2,'WaitUntilDone', true); height = height + Rdist_udlr * 2 else movedown(droneObj,'Distance', Rdist_udlr * 2,'WaitUntilDone', true); height = height - Rdist_udlr * 2 end elseif ratio1 < 0.7 if B_lst(1) >= B_lst(2) moveup(droneObj,'Distance', Rdist_udlr,'WaitUntilDone', true); height = height + Rdist_udlr else movedown(droneObj,'Distance', Rdist_udlr,'WaitUntilDone', true); height = height - Rdist_udlr end end
% 상하 이동 코드. (좌우 코드도 동일 방식) if ratio1 < 0.3 if B_lst(1) >= B_lst(2) moveup(droneObj,'Distance', Rdist_udlr * 2,'WaitUntilDone', true); height = height + Rdist_udlr * 2 else movedown(droneObj,'Distance', Rdist_udlr * 2,'WaitUntilDone', true); height = height - Rdist_udlr * 2 end elseif ratio1 < 0.7 if B_lst(1) >= B_lst(2) moveup(droneObj,'Distance', Rdist_udlr,'WaitUntilDone', true); height = height + Rdist_udlr else movedown(droneObj,'Distance', Rdist_udlr,'WaitUntilDone', true); height = height - Rdist_udlr end end





frame = snapshot(cam); frame = rgb2hsv(frame); h = frame(:,:,1); detect_h = (h >= 0.69) & (h <= 0.8); s = frame(:,:,2); detect_s = (s >= 0.1) & (s <= 0.7); detect_Pdot = detect_h & detect_s; canny_img = edge(detect_Pdot, 'Canny', 0.9, 8); fill_img = imfill(canny_img, 'holes');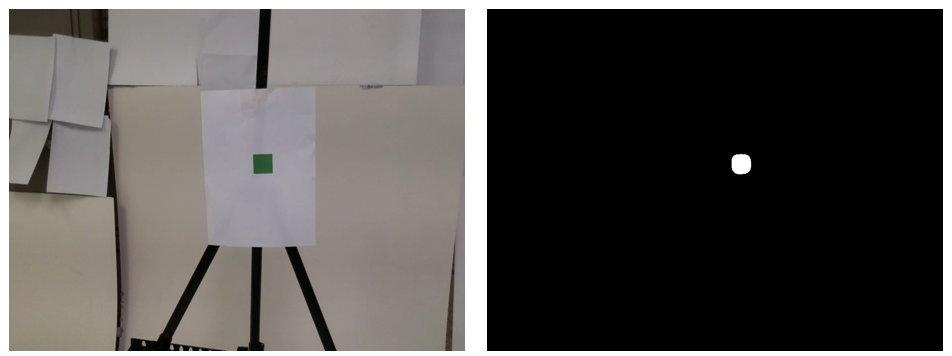
[0]: 후진 후 다시 보라색 표식 픽셀 추출 코드로 이동if purple_sum == 0 moveback(droneObj,'Distance', dist_backward,'WaitUntilDone', true); continue;
[600~4000]: detecting 변수 true로 변경elseif purple_sum >= 600 detecting = true;
[4000~]: 90° turn → 1.2m 전진 → 반복문 탈출elseif purple_sum >= 4000 turn(droneObj, deg2rad(90)); moveforward(droneObj, 'Distance', dist_pass, 'WaitUntilDone', true); findPurpleDot = true;1단계와 동일하게 상하/좌우 비율 비교 후 픽셀이 더 많은 쪽으로 드론 이동

천막이 안보이는 경우를 대비해, 드론의 현재 높이(height)가 0.75보다 낮을 경우 위로 이동
if height <= 0.75
moveup(droneObj,'Distance', 0.7,'WaitUntilDone', true);
end
2단계 통과 후 120° 회전한 상태에서 10°씩 150°까지 회전하면서 각도 비교.
파란색 천막의 픽셀을 가장 많이 검출한 각도가 최적의 각도가 됨.
% 10도씩 회전하며 탐색
max_sum = 0;
for index=1:4
if index > 1
turn(droneObj, deg2rad(10));
end
frame = snapshot(cam);
r = frame(:,:,1); detect_r = (r < 50);
g = frame(:,:,2); detect_g = (g > 10) & (g < 120);
b = frame(:,:,3); detect_b = (b > 50) & (b < 190);
detect_Brect = detect_r & detect_g & detect_b;
sum_blue = sum(sum(detect_Brect));
if sum_blue > max_sum
max_sum = sum_blue;
max_index = index;
end
end% 최적 각도
turn_radi = (-1) * 10 * (4 - max_index);
turn(droneObj, deg2rad(turn_radi));
moveforward(droneObj, 'Distance', 0.4, 'WaitUntilDone', true);
빨간색 표식에서 착지