Repository for the EOgmaNeo-based self driving car (SDC).
Three sub-directories contain Readme.md files that further describes each configuration. A summary for each configuration is presented below.
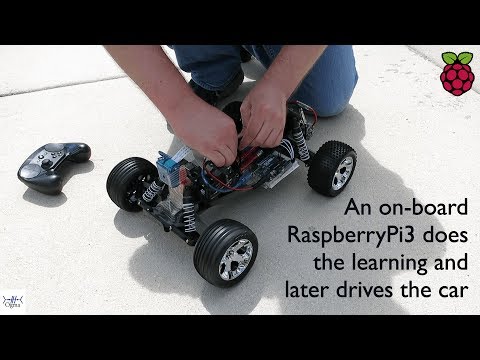
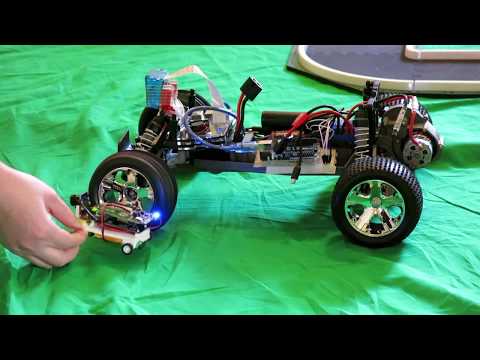
Included are two configurations (1 & 2) used to build a 1/10 scale 2WD RC self driving car, and a third configuration to create a hand-sized 3D printed self driving car (uSDC).
Configuration1 was used in producing the following Ogma YouTube video:
Configuration3 appears in the first issue of the HackSpace magazine (December 2017), as a project on HackADay.io, and was used in producing the following Ogma YouTube video:
As seen in the above video, an InfiniTrax "1080 BEAST" modular track was used with the uSDC.
A Unity based simulation OgmaDrive was used to prototype the SDC, using C# scripts and the EOgmaNeo library.
- Steam Controller with wireless dongle
SDC:
- Traxxas Rustler RC car
- Raspberry Pi3
- Pi Camera v2
- Pi Camera case
- Active cooling case "Eleduino Raspberry Pi 3 and Raspberry Pi 2 Model B Acrylic Case with High Quality Mini Fan"
- 2 pcs 18650 batteries with battery pack (for powering the steering servo)
- Arduino UNO
- Breadboard
- Anker PowerCore 10000 (for powering the Pi)
- Using fast event-based version of EOgmaNeo + OpenCV's Canny Edge + PySerial (for Arduino communication)
RF Version Extra:
- Pi-Top with Raspberry Pi 3
- Arduino UNO (or Leonardo, USB to RPi)
- RF Transmitter/Receiver Modules "Makerfocus 2pcs Wireless Module NRF24L01+PA+LNA in Antistatic Foam Arduino Compatible with Antenna"
Base station, for limited communication with the SDC:
- Pi-Top
- Raspberry Pi3
- Arduino UNO (or Leonardo, USB to RPi)
- XBee Arduino shield (v1.0 or modified v1.3)
- XBee Pro (S1, with u.fl antenna)
SDC:
- Traxxas Rustler RC car (optional clear body)
- Raspberry Pi3
- Raspberry Camera (mounted to front bumper)
- Pimoroni Pibow case
- Freetronics PiLeven (i2c to RPi, UART to XBee)
- XBee Arduino shield (v1.0 or modified v1.3)
- XBee Pro (S1, u.fl antenna)
- Power Bank (to PiLeven or RPi)
- Servo pass-through connector (attached to PiLeven)
- Steam Controller with wireless dongle
- InfiniTrax modular track system (optional)
uSDC:
- 3D Printed base, RPi ZeroW mount, and camera mount
- Raspberry Pi ZeroW
- Pimoroni Explorer pHAT (motor drivers)
- Pololu 136:1 sub-micro planetary gearmotors, wheels, and front ball caster
- Adafruit Lithium Ion Polymer Battery, with a PowerBoost and charger module
- SainSmart wide angle camera
The work in this repository is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. See the EOGMADRIVE_LICENSE.md and LICENSE.md files for further information.

Contact Ogma via licenses@ogmacorp.com to discuss commercial use and licensing options.
EOgmaDrive Copyright (c) 2017 Ogma Intelligent Systems Corp. All rights reserved.