ONLY support python 3.6+, pytorch 1.0.0+. Tested in Ubuntu 16.04.
通过更改雷达驱动使驱动使之可以输出通道ring信息,为算法提供支持 使用方法参考rslidar
git clone https://https://github.com/tt-leader/Lidar-detection.gitpip3 install numba pyntcloud pyyaml rospkg pyquaternion protobuf安装ros_numpy:
git clone https://github.com/eric-wieser/ros_numpy
cd ros_numpy && python setup.py install
LLVM_CONFIG找不到的问题:
sudo apt-get install llvm-8
export LLVM_CONFIG=/usr/bin/llvm-config-8
pip3 install numba
No lapack/blas resources found 问题:
apt-get install gfortran libopenblas-dev liblapack-dev
pip3 install scipyFollow instructions in spconv to install spconv.
can not find CUDNN问题:添加软连接
sudo ln -s libcudnn.so.7 libcudnn.so
Follow instructions in torch2trt to install torch2trt
apt install ros-melodic-rospy ros-melodic-ros-base ros-melodic-sensor-msgs ros-melodic-jsk-recognition-msgs ros-melodic-visualization-msgsyou need to add following environment variable for numba.cuda, you can add them to ~/.bashrc:
export NUMBAPRO_CUDA_DRIVER=/usr/lib/aarch64-linux-gnu/libcuda.so
export NUMBAPRO_NVVM=/usr/local/cuda/nvvm/lib64/libnvvm.so
export NUMBAPRO_LIBDEVICE=/usr/local/cuda/nvvm/libdevice- 进入工程根目录
cd ./Lidar-detection/second
- 生成tensorrt引擎
python utils/convert2rt.py --model_dir ./weights/pointpillarsBG --bg_filter
- 启动ros推理节点
python inference_ros.py --tensorrt --model_dir ./weights/pointpillarsBG --bg_filter --tensorrt
- 启动rviz可视化
rviz -d rviz/lidar_detection.rviz
- Kitti lidar box
A kitti lidar box is consist of 7 elements: [x, y, z, w, l, h, rz], see figure.
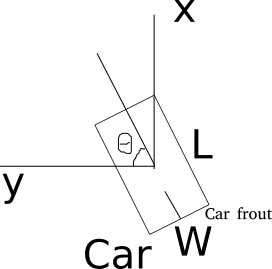
All training and inference code use kitti box format. So we need to convert other format to KITTI format before training.
- Kitti camera box
A kitti camera box is consist of 7 elements: [x, y, z, l, h, w, ry].