@[toc](【Renesas RA6M4开发板之UART与Serial studio串口交互】)
UART(Universal Asynchronous Receiver/Transmitter)通用异步收发传输器,UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。是在应用程序开发过程中使用频率最高的数据总线。
UART 串口的特点是将数据一位一位地顺序传送,只要 2 根传输线就可以实现双向通信,一根线发送数据的同时用另一根线接收数据。UART 串口通信有几个重要的参数,分别是波特率、起始位、数据位、停止位和奇偶检验位,对于两个使用 UART 串口通信的端口,这些参数必须匹配,否则通信将无法正常完成。UART 串口传输的数据格式如下图所示:

-
起始位:表示数据传输的开始,电平逻辑为 “0” 。
-
数据位:可能值有 5、6、7、8、9,表示传输这几个 bit 位数据。一般取值为 8,因为一个 ASCII 字符值为 8 位。
-
奇偶校验位:用于接收方对接收到的数据进行校验,校验 “1” 的位数为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性,使用时不需要此位也可以。
-
停止位: 表示一帧数据的结束。电平逻辑为 “1”。
-
波特率:串口通信时的速率,它用单位时间内传输的二进制代码的有效位(bit)数来表示,其单位为每秒比特数 bit/s(bps)。常见的波特率值有 4800、9600、14400、38400、115200等,数值越大数据传输的越快,波特率为 115200 表示每秒钟传输 115200 位数据。
应用程序通过 RT-Thread 提供的 PWM 设备管理接口来访问 PWM 设备硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| 函数 | 描述 |
| rt_device_find() | 查找设备 |
| rt_device_open() | 打开设备 |
| rt_device_read() | 读取数据 |
| rt_device_write() | 写入数据 |
| rt_device_control() | 控制设备 |
| rt_device_set_rx_indicate() | 设置接收回调函数 |
| rt_device_set_tx_complete() | 设置发送完成回调函数 |
| rt_device_close() | 关闭设备 |
实现功能: 采用UART0输出数据,Serial Studio作为上位机接收数据,显示对应端口的状态和传感器的动态显示,并且实现简单控制。
1、RA6M4开发板
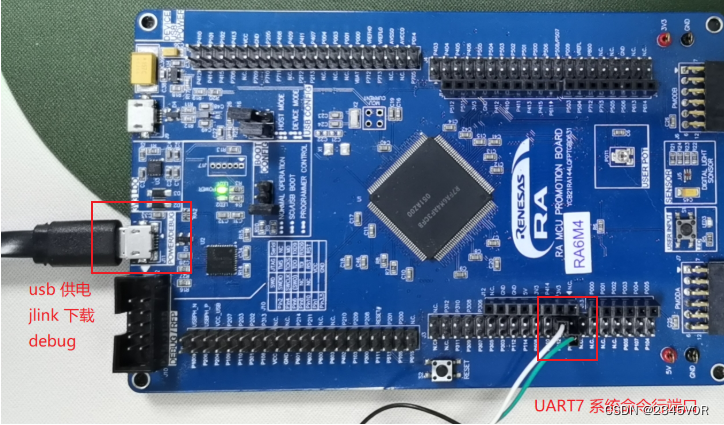
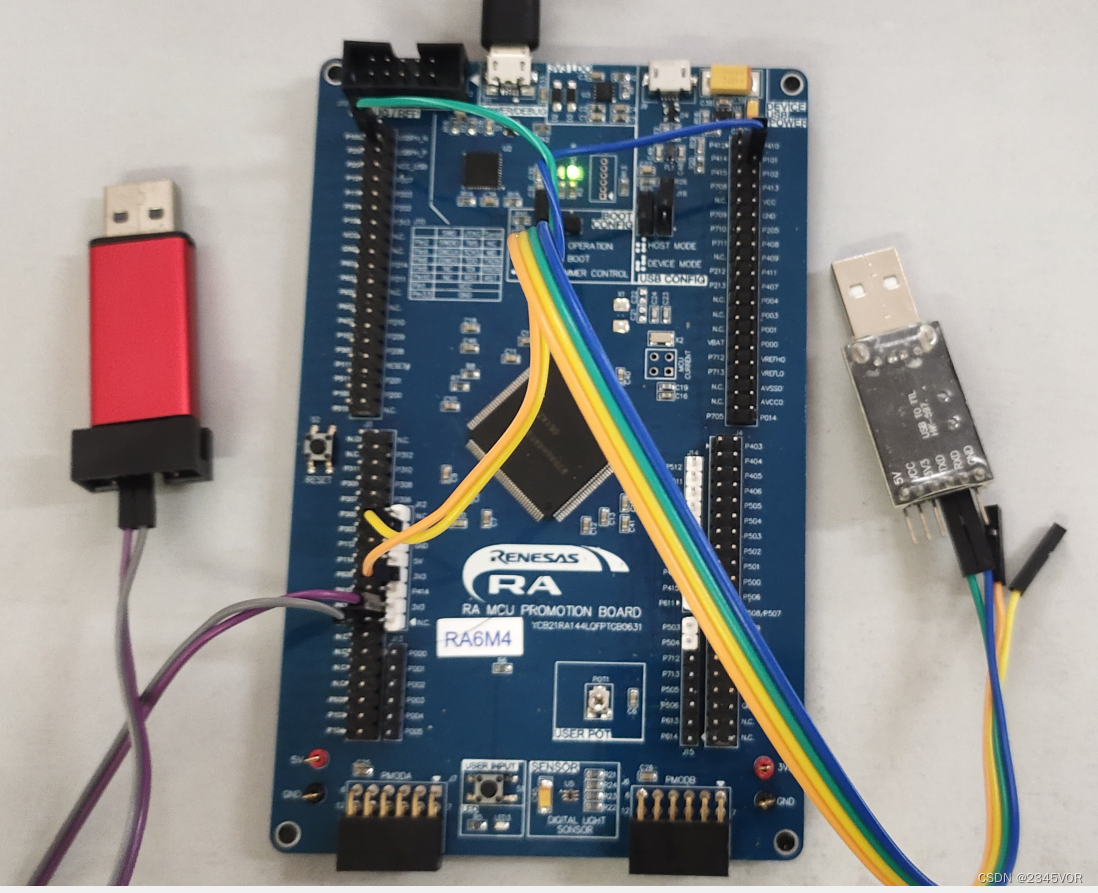
硬件到此配置完成
Renesas RA6M4开发板环境配置参照:【基于 RT-Thread Studio的CPK-RA6M4 开发板环境搭建】
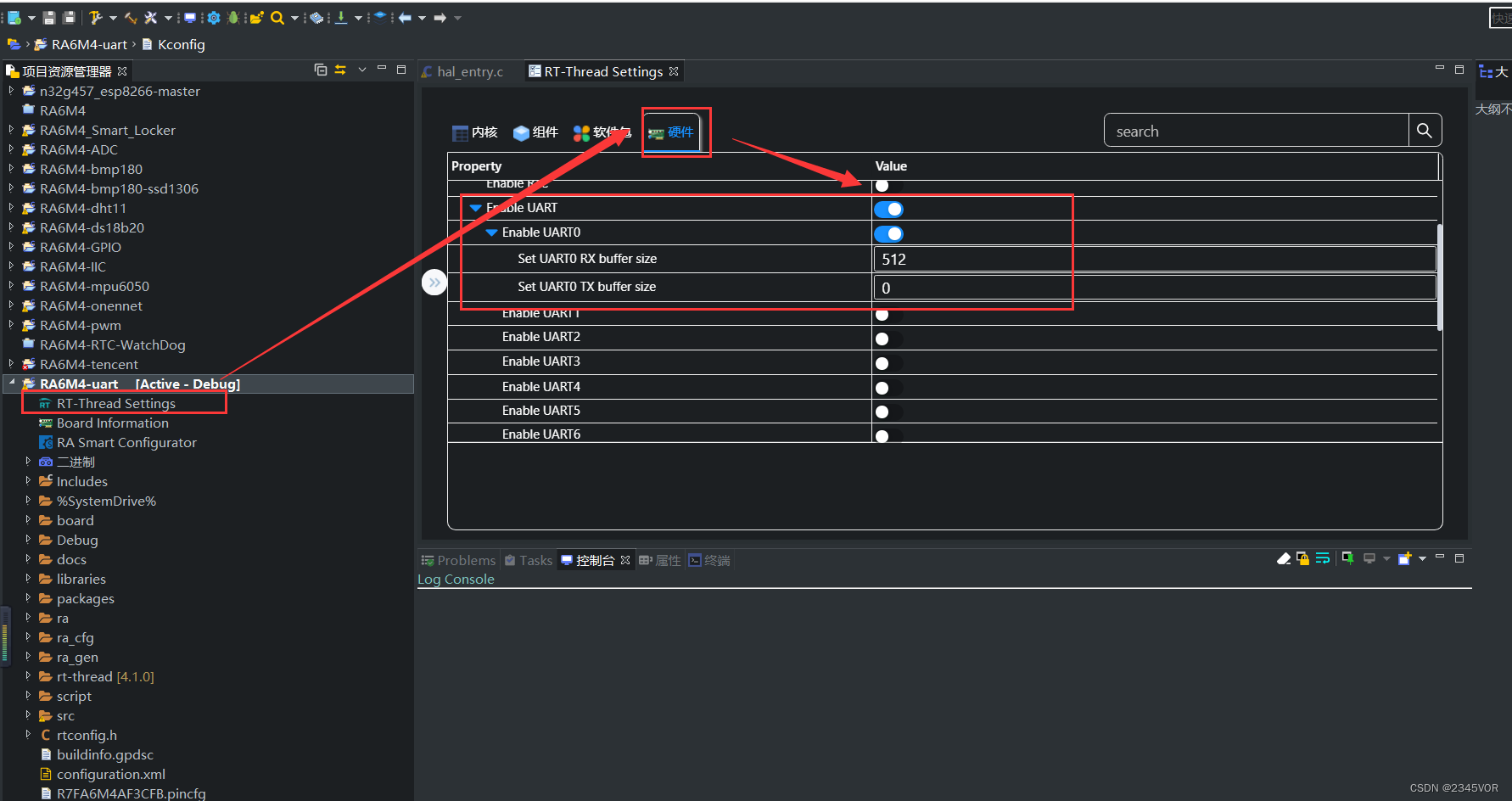
1、新建项目RA6M4-uart工程
2、查阅RA6M4硬件资源,相关资料,在RT-theard Setting 硬件中需要使能uart0
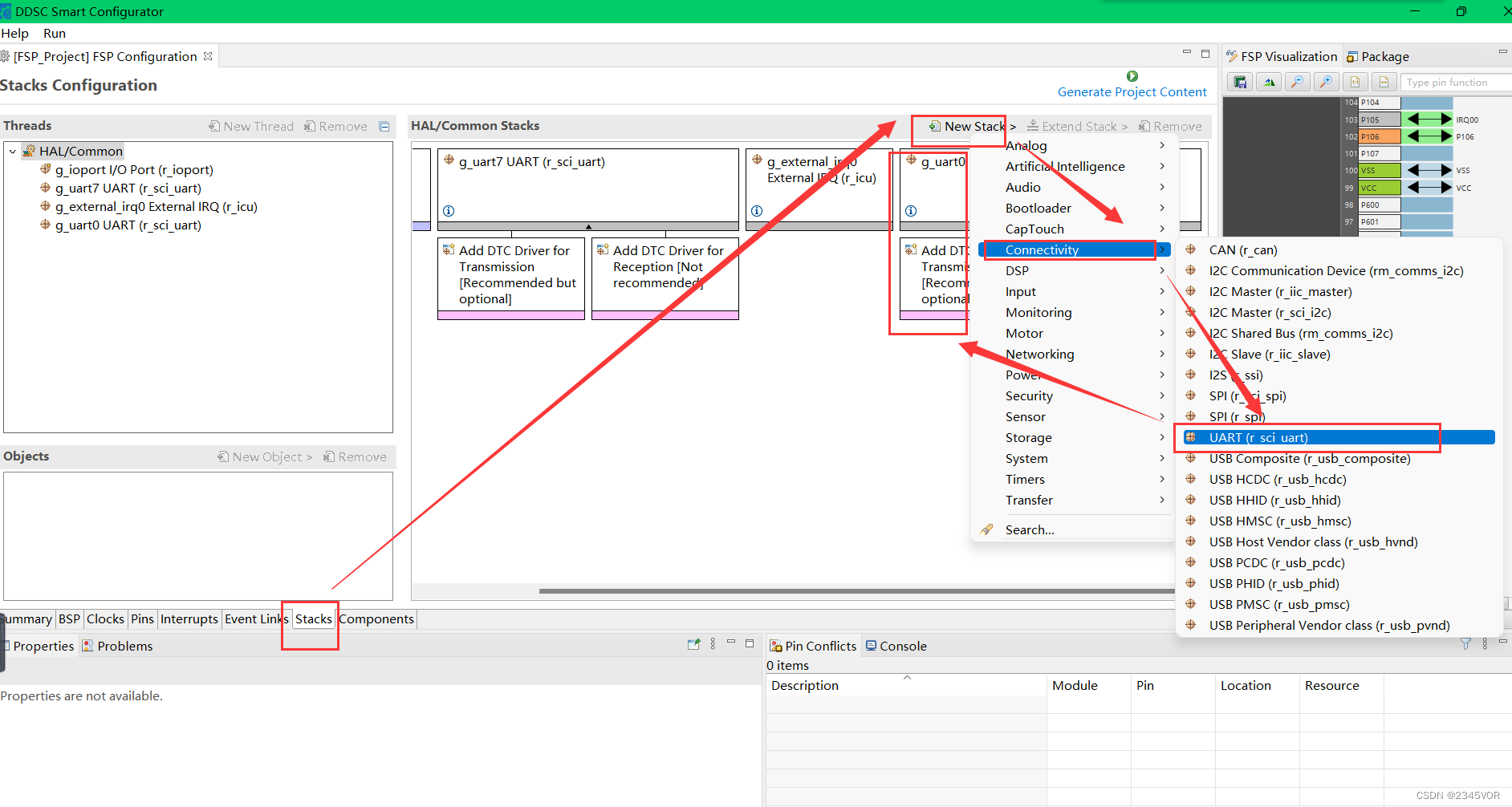
3、打开RA Smart Congigurator,在Stacks中New Stack添加r_gpt
4、在Property的Module的General中name定义为g_uart0,Channel选0,回调函数改为user_uart0_callback ,Pins选择P100和P101
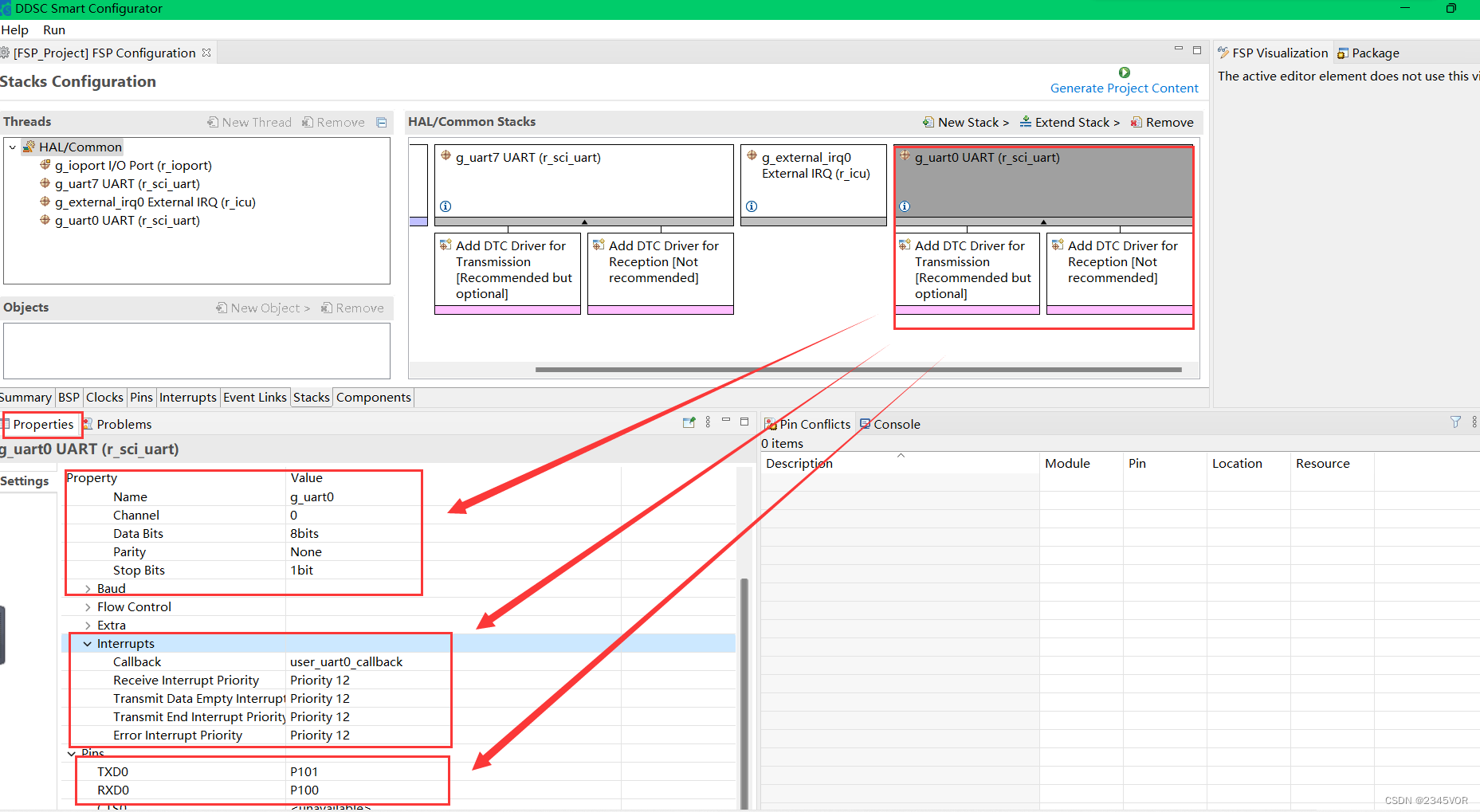
图形化配置已经完成,接下来配置相关代码
1、修改hal_entry.c函数,屏蔽LED3普通GPIO输出
/*
* 程序清单:这是一个 串口 设备使用例程
* 例程导出了 uart_sample 命令到控制终端
* 命令调用格式:uart_sample
* 命令解释:命令第二个参数是要使用的串口设备名称,为空则使用默认的串口设备
* 程序功能:通过串口输出字符串"hello RT-Thread!",然后输出输入的字符
*/
#include <rtthread.h>
#include "hal_data.h"
#include <rtdevice.h>
#include <stdio.h>
#include <string.h>
#define LED3_PIN BSP_IO_PORT_01_PIN_06
void hal_entry(void)
{
rt_kprintf("\nHello RT-Thread!\n");
while (1)
{
rt_thread_mdelay(10);
}
}
#define SAMPLE_UART_NAME "uart0"
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
/*uart0串口输出线程*/
void serial_thread_entry(void *parameter)
{
char str1[50];
char HeadByte[50] ="/*KAANSATQRO";
while (1)
{
sprintf(str1, "%s,%d", HeadByte, rt_pin_read(LED3_PIN));
sprintf(str1, "%s,%d", str1,rt_pin_read(LED3_PIN));
sprintf(str1, "%s%s", str1,"*/ \r\n");
rt_device_write(serial, 0, str1, (sizeof(str1) - 1));
rt_thread_mdelay(200);
}
}
/*控制命令线程*/
void control_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据通过串口错位输出 */
ch = ch + 0;
if(ch=='1')
{
rt_pin_write(LED3_PIN, PIN_HIGH);
rt_thread_mdelay(50);
rt_kprintf("\n PIN_HIGH \n");
}
else if(ch=='0')
{
rt_pin_write(LED3_PIN, PIN_LOW);
rt_thread_mdelay(50);
rt_kprintf("\n PIN_LOW \n");
}
else {
rt_kprintf("\n error \n");
}
rt_device_write(serial, 0, &ch, 1);
rt_thread_mdelay(5);
}
}
/*初始化和启动串口输出和控制线程*/
static int uart_sample(int argc, char *argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
rt_kprintf("Hello RT-Thread!\n");
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/* 查找系统中的串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 control_thread 线程 */
rt_thread_t control_thread = rt_thread_create("control", control_thread_entry, RT_NULL, 1024, 30, 10);
/* 创建成功则启动线程 */
if (control_thread != RT_NULL)rt_thread_startup(control_thread);
/* 创建 serial_thread 线程 */
rt_thread_t serial_thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (serial_thread != RT_NULL)
{
rt_thread_startup(serial_thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(uart_sample, uart device sample);
其他不变。
保存完是灰色,没有保存是蓝色。
uart_sample导 出 到 msh 命 令 列 表 中,实现pwm8的两路输出
1、编译重构
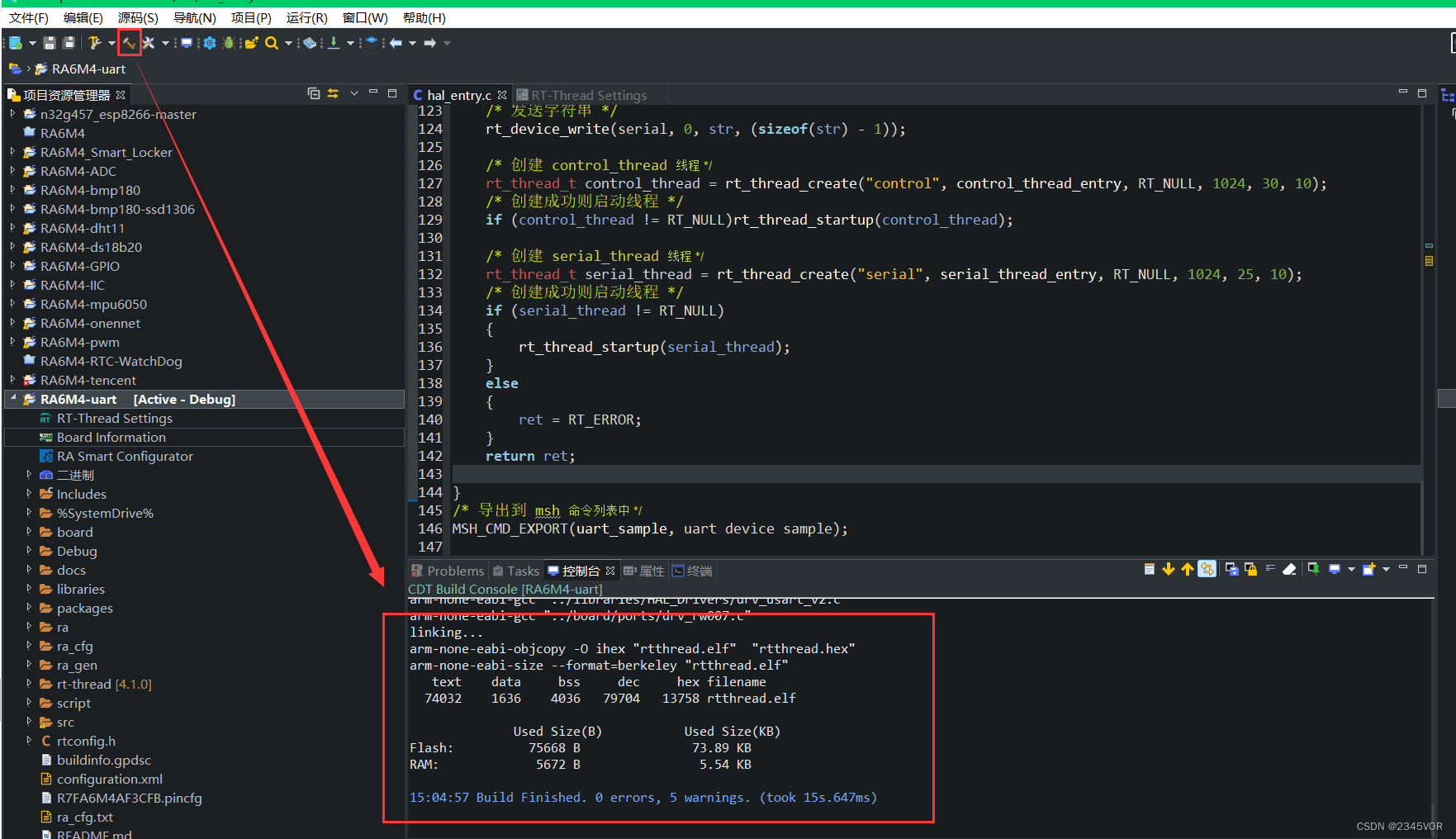
编译成功
2、下载程序
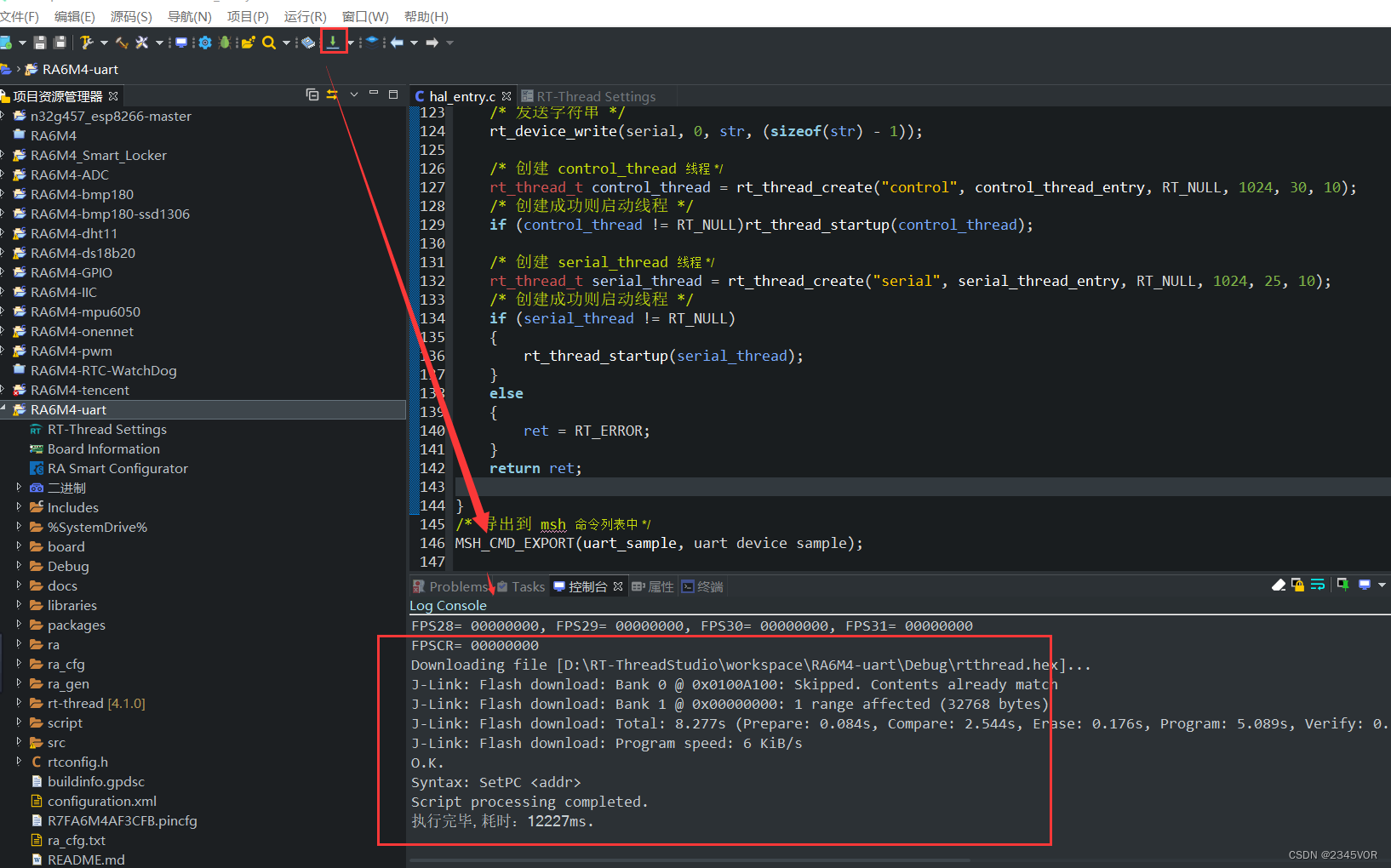
3、CMD串口调试
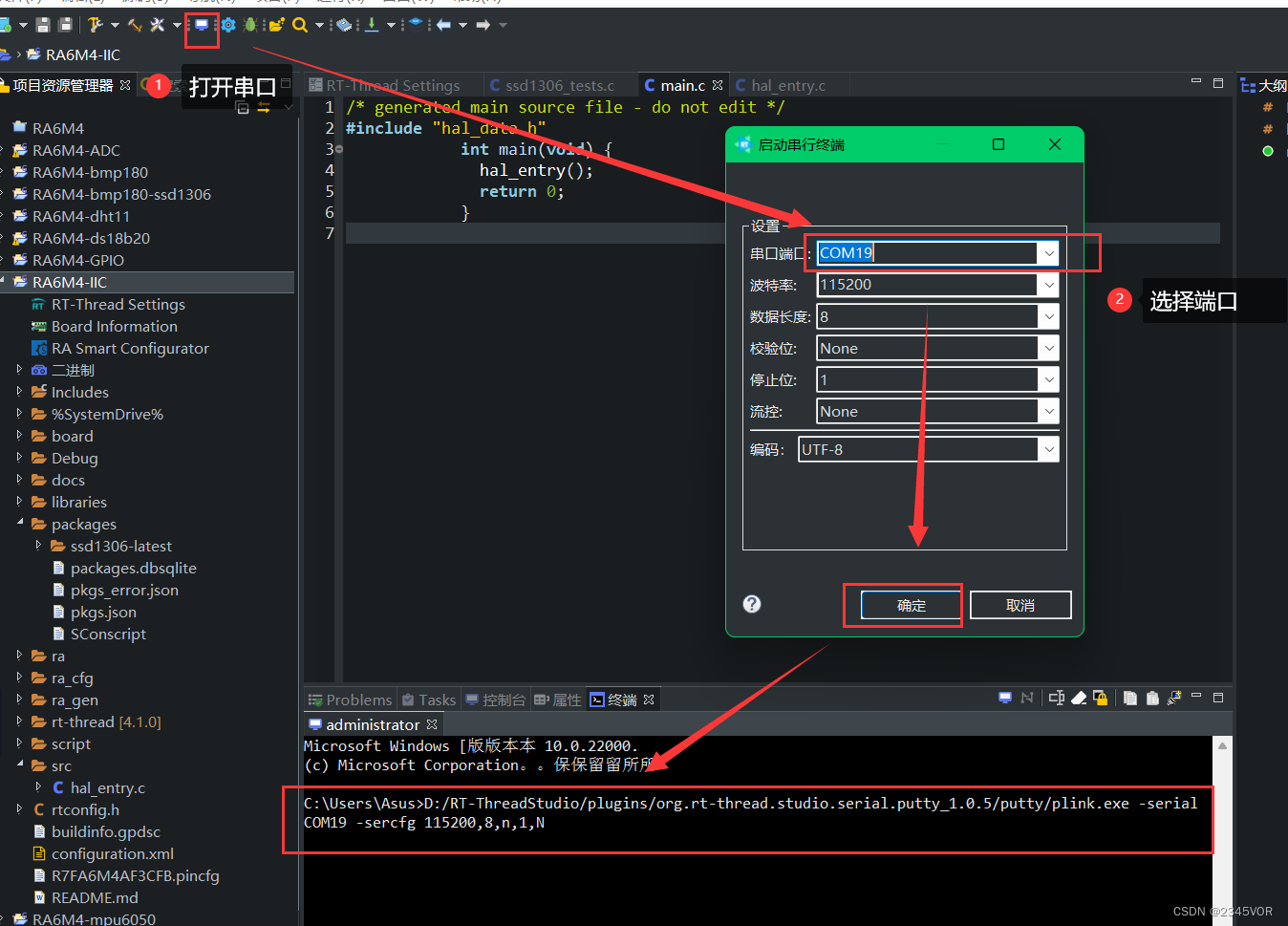
uart_sample
此时可以与Serial Studio一起联动啦!🎉🎉🎉
请参照【开源的串口可视化工具——Serial Studio】
效果如下
这样我们就可以天马行空啦!

参考文献; 【基于 RT-Thread Studio的CPK-RA6M4 开发板环境搭建】 【开源的串口可视化工具——Serial Studio】