stream kinect's depth image to websocket clients
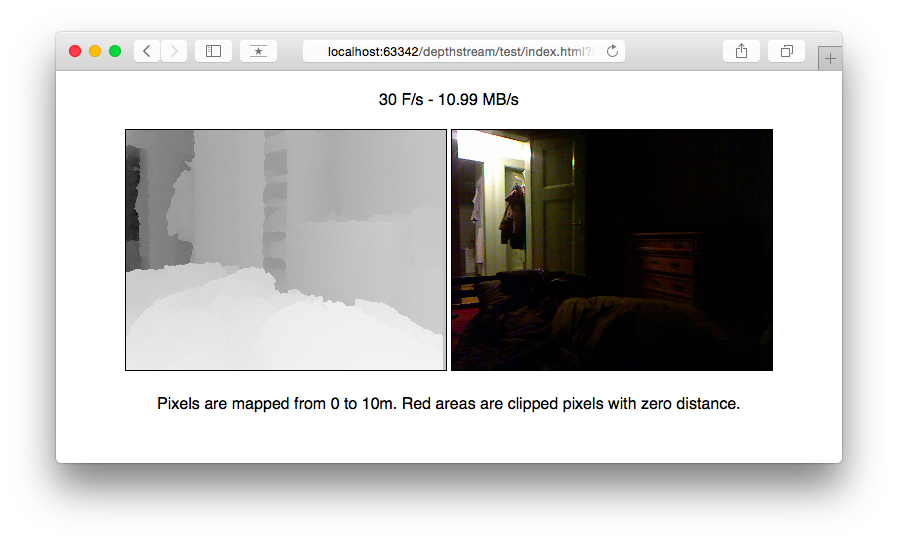
With Depsthream you can easily get depth image data from your Kinect using a WebSocket Connection. A wepage running on the same computer can that way easily obtain the depth pixel array and feed into an animation.
Depthstream.
Usage:
depthstream [options]
Options:
-h --help Show this screen.
-i --info Show connected Kinects.
-p --port=<n> Port for server. [default: 9090].
-d --device=<n> Device to open. [default: 0].
-b --bigendian Use big endian encoding.
-r --reduce=<n> Reduce resolution by nothing or a power of 2. [default: 0]
-I --interpolate=<n> Interpolate zeroed pixels with a filter block of n*n. [default: 0]
-s --skip=<n> Skip every nth frame of the incomming 30fps stream. [default: 0]
-c --color Append color data.
Make a connection to the server and request a frame or stream mode by sending a message:
var ws = new WebSocket('ws://localhost:9090');
ws.binaryType = 'arraybuffer';
ws.onopen = function (event) {
ws.send('1'); // request the current cashed frame
ws.send('*'); // add connection to the stream list
};
ws.onmessage = function (message) {
// the array contains 640*480 values from 0 to 10000
// representing the depth in millimeters
var array = new Uint16Array(message.data);
};See the example.
First install dependencies using brew:
$ brew install libusb
$ brew install libfreenectThen download the latest binary from releases.
$ gopm get
$ gopm build