An example LPC845 configuration for Clion
This has a super simple blink example with an LCP845, it's main purpouse is to share this configuration with the community.
- Install ARM GNU toolchain
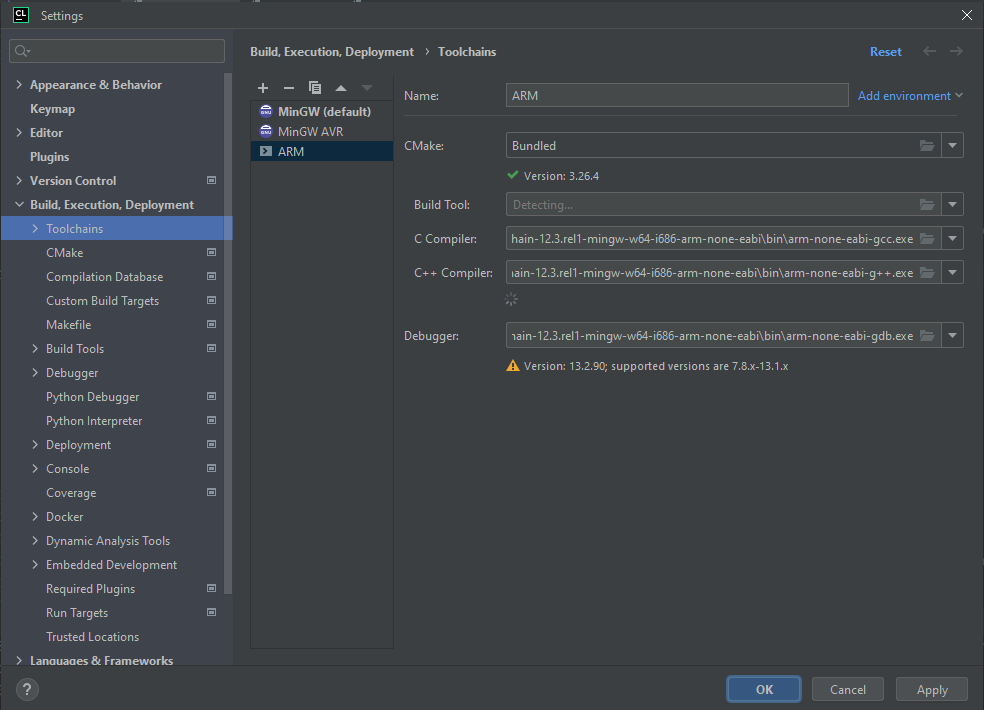
- Configure Clion's toolchain for ARM as a "system"
toolchain (CLion's guide)
you just need to select the compilers and debugger:
- Download and install LinkServer from here
- MCUXpresso or corresponding IDE

When project gets opened for the first time you need to set up ARM toolchain.

If you have an LPC845 board, you can clone this repository and open it with Clion. If not, you can follow the guide on how to configure it for your own NXP board.
- Clone this repository
- Modify the CMakeLists.txt with preprocessor definitions and compiler and linker flags you can get by copying from a simple MCUXpresso project
- Create a “ARM GCC / MCUXpresso for VS Code” SDK in NXP's SDK builder and
download an example project inside that project copy the equivalent files for the ones this project has
on
firmware/CMSISandfirmware/devicedirectories - Create a project in MCUXpresso and copy the files there are in
firmware/MCUXpressodirectory to get access to ROMDIVIDE (which is constant time division). Note: There are more files, but they are not on a working state yet
Disclaimer: Inside CMakeLists.txt there is a variable called "MCU_DEVICE" which is used for both linker script name and also for flashing target, have this in mind if these are different on your board(flashing tutorial below)
At the top of the CMakeLists.txt file there is a "Flashing settings" section which has:
- LINK_SERVER_EXE: The path to the LinkServer executable
- DEVICE: Device name you can get by running
LinkServer devices, you can use the--filterflag to filter names - BOARD: You also get it from
LinkServer devices - SERIAL_PROBE: You need to have your board connected to the computer and run
LinkServer probes
You can create a new debug configuration at Run->Edit Configurations->Add New Configuration->Embedded GDB Server
-
Target: Project build configuration
-
Executable: The elf file generated by the project
-
Debugger: Select the debugger from ARM toolchain
-
target remote:
localhost:3333(it is default configuration, you can change it withLinkServer gdbserver --gdb-port) -
GDB server: The path to the LinkServer executable
-
GDB server args:
gdbserver <DEVICE>:<BOARD> --probe <SERIAL_PROBE>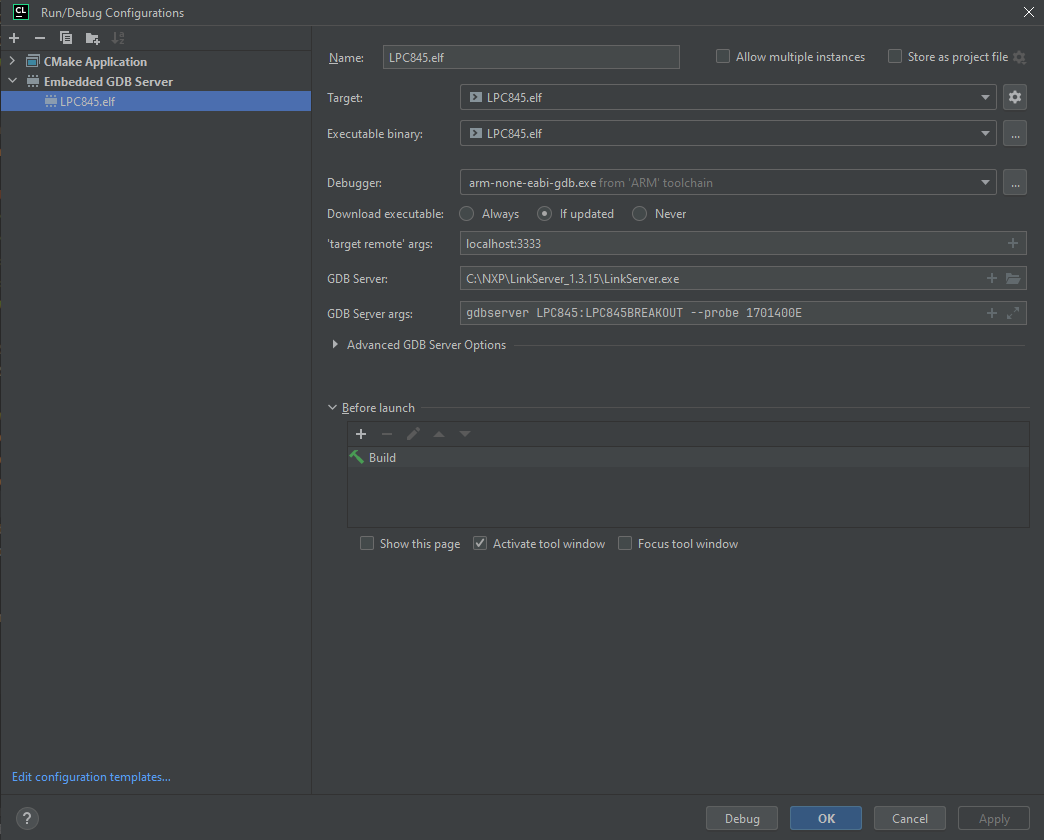

If you have an LPC845 you can use the file in firmware/LPC845.svd if you have another board you can get it from SDK
folder at devices/<device>/<device>.xml you just need to change the extension to .svd
Once you are debugging can go to "peripherals" and load the svd file
You can change the compilation mode, controlling the optimization level and debug symbols, by changing the configuration
at Settings->Build, Execution, Deployment->CMake->Build type Release and RelWithDebInfo are both optimized for
speed and MinSizeRel is optimized for size

For any comment/question feel free to open an issue or a new discussion