The existing code base(ROAR_Sim) developed for the ROAR project mainly focuses on the interaction between one vehicle and the environment. Reinforcement learning model is hard to converge. To help RL model converge, I provide the solution: Multi-Agents RL Model Training.
In this project,I implemented multi-agents training solution in one world (Berkeley Minor Map).
- Support multiple RL agents training.
- Support one RL agent training with other vehicles (not RL agents).
Jingjing Wei (jingjingwei@berkeley.edu)
If you encountered any problems during configuration and running the script, please feel free to contact me.
- The zip file is available here.
- Please make sure you download the engine from this link, since there are multiple carla version and engines within ROAR project.
- Please download it to a disk with more than 10GB available spaces, and then unzip the file.
- After that, you can get a
Carlafolder.
https://docs.anaconda.com/anaconda/install/index.html
Then open an Anaconda Powershell Prompt Terminal
To simplify the configuration, please clone two repo to your local, with ROAR1 and ROAR2 as their folder name.
git clone https://github.com/Allison-1999/ROAR.git ROAR1
git clone https://github.com/Allison-1999/ROAR.git ROAR2
cd ROAR1
conda create -n roar_multi_rl_client_3.7.7 python=3.7.7
conda activate roar_multi_rl_client_3.7.7
pip install -r multi_clients_requirements.txt
Please be patient during the installation, the terminal will take around 5-10 mins to install packages. And may spend several minutes in the following step.

Open your PyCharm USING RUN AS ADMINISTRATION (Otherwise, the model saving will fail)
And open the ROAR1 and ROAR2 projects separately in two PyCharm windows using open.
Please select open in new window to get two PyCharm windows.

Please notice that don't let PyCharm create the virtual environment. Please press Cancel if see the following dialog.

Your PyCharm should look like the following image

Please select the environment you created in the Step 3.1 Build environment for both ROAR1 PyCharm window and ROAR2 PyCharm window.

Then, please wait for the indexing.

After configuring the environment, to run e2eModel, please change the stable_baseline3.
The easiest way is to enter the \.conda\envs\ROAR\Lib\site-packages directory, delete the stable_baselines3-1.5.0.dist-info and stable_baselines3 folders and then copy the two folders with the same names under ROAR\package_stable_baselines3 to \.conda\envs\ROAR\Lib\site-packages directory instead.

Otherwise, you can edit the package manually by checking the instruction on the top section of ROAR_gym/e2eModel.py, which was written by the group member who is responsible for RL model training.
Before starting, please set the API key for wandb. wandb is integrated by other team member to see the training process.
I provided my API key as follows. It's fine for running a demo, but if you want to train your own model, please register a new one.
For more information, please check https://docs.wandb.ai/quickstart
pip install wandb
wandb login a20e04de52982c4c0293909e28070b1338acba5e
If you are using your own wandb account, please also change the project_name and entity in ROAR_gym/configurations/wandb_configuration.json file
Change spawn_point_id in ROAR_gym/configurations/agent_configuration.json line 60, set 0 for ROAR1 and set 1 for ROAR2
with its context should be:
for ROAR1:
"enable_autopilot": true,
"spawn_point_id": 0,
"show_sensors_data": true,
"save_sensor_data": false
for ROAR2:
"enable_autopilot": true,
"spawn_point_id": 1,
"show_sensors_data": true,
"save_sensor_data": false
[NOTICE] In the Berkeley minor map, the spawn points are too close to each other.
So even when you set different spawn points, you may still get the `ValueError: Cannot spawn actor at ID [1]. Error: Spawn failed because of collision at spawn position`\
In that case, please make sure you start one client first, and start the second client a few second later.
In this case, you may also need to restart the UE4 engine, since the vehicle from a previous failure client may still remain in the simulation world and hold the spawn point.
Then, change the "run_name" in the following file: ROAR_gym/configurations/ppo_configuration.py.
Please change the "run_name" to a new string that never been used, for instance, you can append your nickname to it (<Nickname>_ROAR1, <Nickname>_ROAR2)
for ROAR1:
misc_params = {
"env_name": 'roar-e2e-ppo-v0',
"run_fps": 8, # TODO Link to the environment RUN_FPS
"model_directory": Path("./output/PPOe2e_Run_1"),
"run_name": "ROAR1", # <------------change this line
"total_timesteps": int(1e6),
}
for ROAR2:
misc_params = {
"env_name": 'roar-e2e-ppo-v0',
"run_fps": 8, # TODO Link to the environment RUN_FPS
"model_directory": Path("./output/PPOe2e_Run_1"),
"run_name": "ROAR2", # <------------change this line
"total_timesteps": int(1e6),
}
After that, you also need to update the ROAR_gym/configurations/wandb_configuration.json file, and set different run_id.
for ROAR1:
{"run_id": "ROAR1, "name": "", "project_name": "ROAR", "entity": "jingjingwei"}
for ROAR2:
{"run_id": "ROAR2", "name": "", "project_name": "ROAR", "entity": "jingjingwei"}
If you don't change the run_name to a unique key, you will get the following error when saving the model.
wandb: ERROR Error while calling W&B API: Error 1062: Duplicate entry '908467-Run 1' for key 'PRIMARY' (<Response [409]>)
Please open the CarlaUE4 you got in the first step.

Please open the file ROAR_gym/e2eModel.py
Then find the green run button, and run the e2eModel.py script of ROAR1 and ROAR2 one by one in PyCharm.

- Demo Video: https://youtu.be/laiqscH3D54

- This validated that multiple RL training can be started in the same world though multi-client.

If you want to get this results, please run the ROAR_gym/e2eModel.py script of ROAR1 and runner_sim.py script of ROAR2.
- Demo video: https://youtu.be/vcN-FdV7lzo
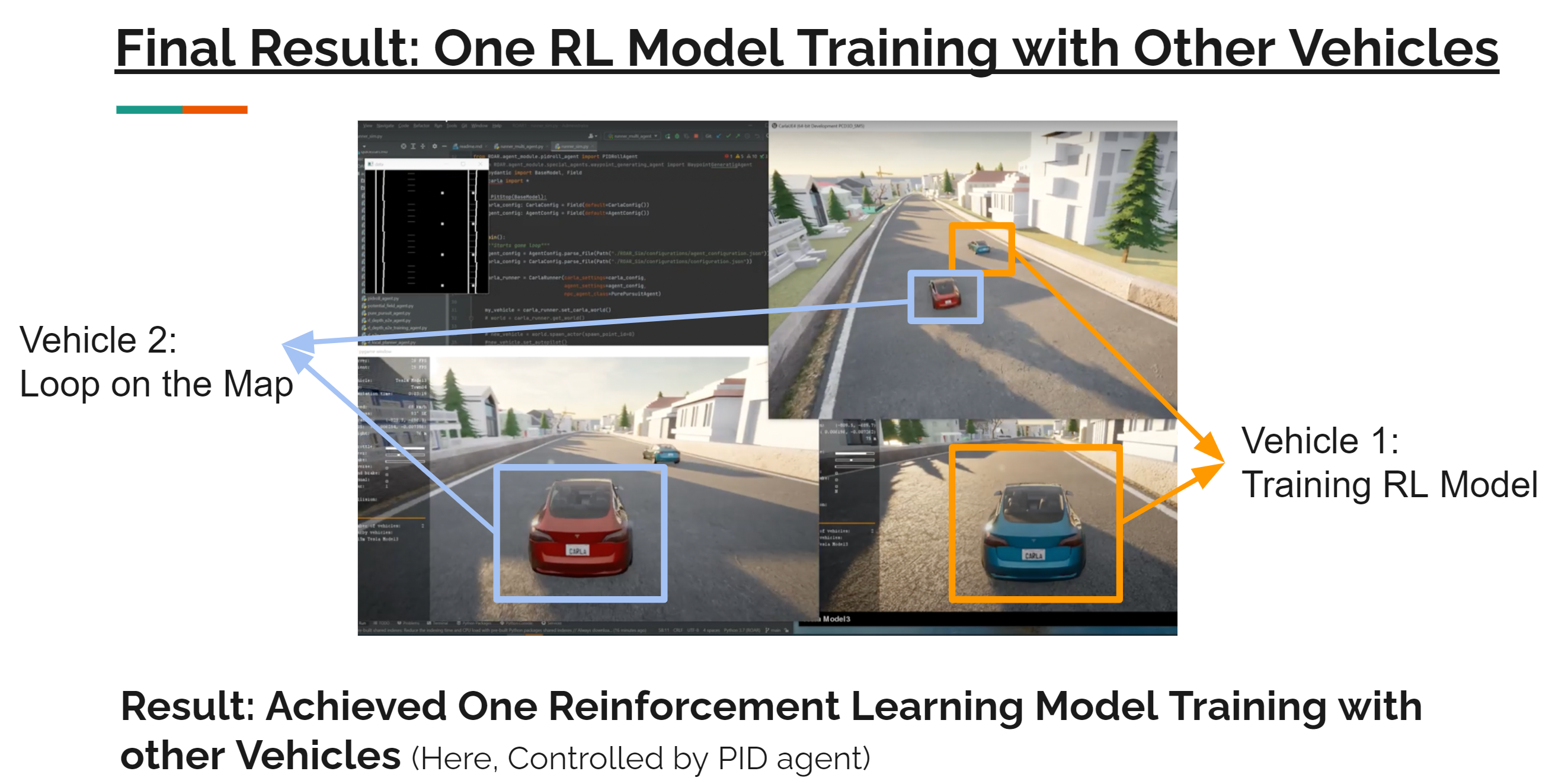
- This validated that one RL training can be started with other agents in the same world though multi-client.

[1] If you see the following errors:
ValueError: Cannot spawn actor at ID [1]. Error: Spawn failed because of collision at spawn position.
It may caused by:
- A vehicle from previous killed client occupy the position. Please close your CarlaUE4 using Task Manager.
- You start the
ROAR1andROAR2at the same spawn point. Please check the spawn point discribed in the Step 3.6 and start two script one by one.
[2] If you see the following errors:
wandb: ERROR Error while calling W&B API: Error 1062: Duplicate entry '908467-Run 1' for key 'PRIMARY' (<Response [409]>)
Then please use a unqiue run_id and run_name as described in Step 3.6
[3] If you see the following errors:
RuntimeError: time-out of 2000ms while waiting for the simulator, make sure the simulator is ready and connected to 127.0.0.1:2000
If you see this error, please delete all previous UE4 engine using Task Manager to make sure port 2000 is available or restart your system.
[4] If your computer is not powerful enough, you may encounter the blue screen problem which need a reboot. Please run multi-agent RL training in a high-end PC.

- Redesign the reward of RL model to achieve:
- Train multiple RL agents to speed up model converge (Helpful for more complicated map -> Berkeley Major Map)
- Train one RL agent that can avoid collide with other vehicles.
- Multiple vehicles racing
[1] Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., & Koltun, V. (2017). Carla: An open urban driving simulator. In Conference on robot learning (pp. 1–16).
[2] Python API - CARLA Simulator. (2022). Retrieved 8 May 2022, from https://carla.readthedocs.io/en/latest/python_api
[3] The RL model training script is credit to other teammates.