- 最近在做车道线检测、分割的工作,读到一篇十分不错的文章对此做下总结
- 首先点名推荐一篇IEEE IV 2018的优秀论文:《LaneNet: Real-Time Lane Detection Networks for Autonomous Driving》
- 这篇文章主要解决了车道切换以及车道数的限制的问题
- 实现方法是:通过训练神经网络进行端到端的车道检测,将车道检测作为实例分割问题来实现
- 文章提出了 Lannet 网络结构,如下图:
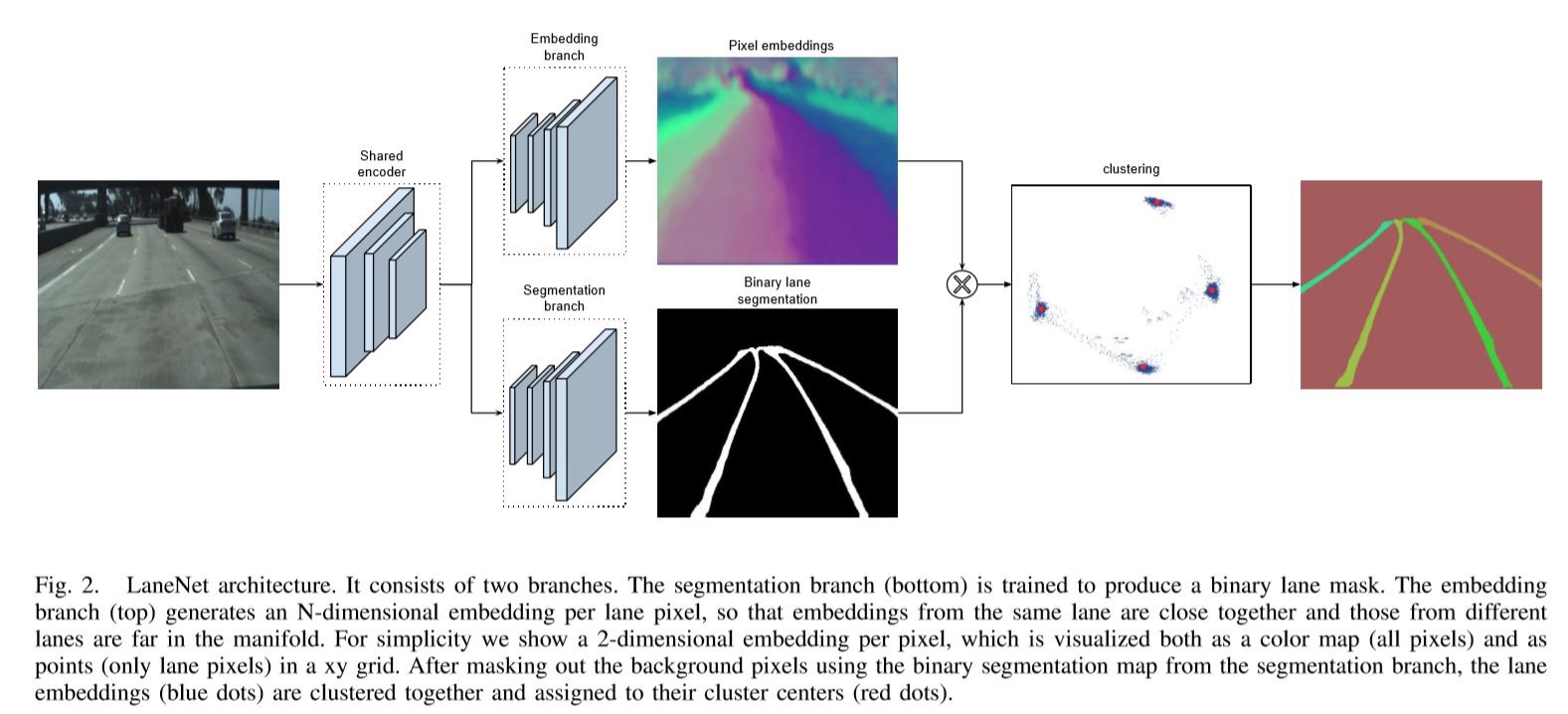
- Lanenet 使用一个共享的encoder,对输入图像进行处理,得到2个branch:嵌入branch和语义分割的branch。嵌入branch可以将不同的车道线区分为不同的instance;因为只需要考虑车道线,因此语义分割的结果是二值化图像;然后对2个branch做聚类,最终得到结果

- 通常情况下,车道像素被投影成“鸟瞰图”表示,使用一个固定的转换矩阵。然而,由于变换参数对所有图像都是固定的,所以当遇到非地面时,例如在斜坡上,这会引起一些问题。为了缓解这个问题,文章提出 H-Network,它可以估算输入图像上的“理想”透视变换的参数。
-
基于学习方法的投影方法H-Net
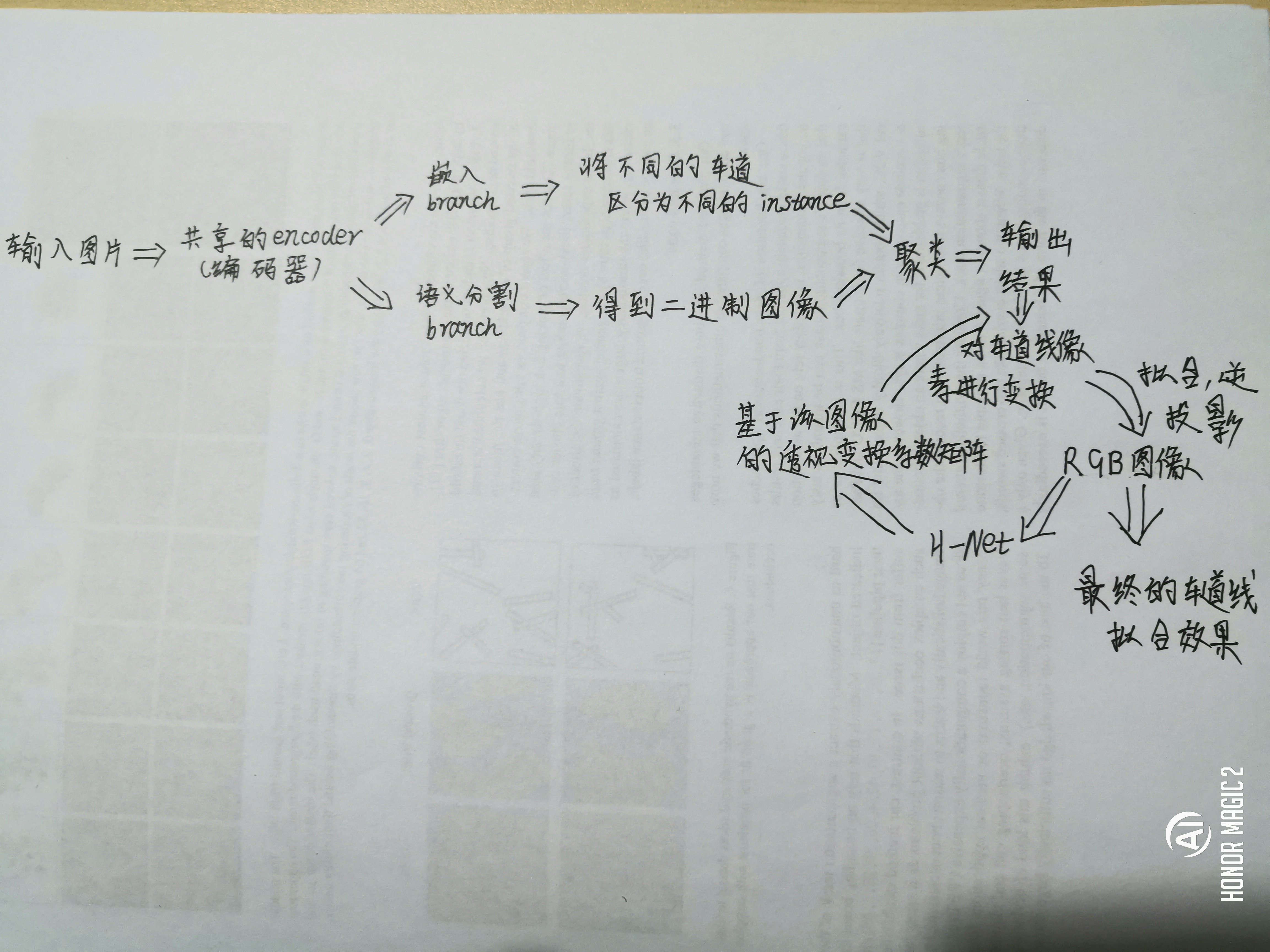
- 将输入的RGB图像作为输入,使用LaneNet得到输出的实例分割结果,然后将车道线像素使用H-Net输出得到的透视变换矩阵进行变换,对变换后的车道线像素在变化后的空间中进行拟合,再将拟合结果经过逆投影,最终得到原始视野中的车道线拟合结果
- H-Net将RGB作为输入,输出为基于该图像的透视变换系数矩阵,优化目标为车道线拟合效果
-
论文的整体计算流程图大致如下(草图)所示:

- 说到这篇端到端的车道线检测,不得不提的是这篇文章中用到的一个聚类loss,同样是这篇文章的作者发表的一篇文章《Semantic Instance Segmentation with a Discriminative Loss Function》
-
这篇文章最重要的是提出一个判别损失函数,其主要作用是:
- 1.同instance内部像素的embedding vector在映射空间中要尽可能的临近(L1、L2距离)
- 2.不同instance的mean embedding vector(即在映射空间中聚类的中心点)要尽可能的远离
- 即希望embedding vectors 在映射空间中的位置如下图所示:

- 图中所示的intra-cluster pull force 即为上述条件1,inter-cluster push force即为上述条件2
- 为了满足这两个条件,文章进一步设计了Loss function。具体公式如下:

- 其中

- C代表groundtruth中instance数目,Nc代表某个instance中的像素个数。Xi 代表instance中第i个像素产生的embedding vector
-
 是groundtruth中该instance的所有像素对应的embedding vectors在映射空间中的中心(mean vector)。
是groundtruth中该instance的所有像素对应的embedding vectors在映射空间中的中心(mean vector)。 -
最后一项为正则项,目的是让映射空间中每个cluster(对应于instance)的中心与原点的距离不要过远。

- 训练过程中使用ground truth作为instance mask。上述LOSS仅涉及同一类object的不同instance之间的聚类学习。如果要用到多类object,则需要分别对每个类计算LOSS并累加。
- 关于Discriminative Loss 笔者已用 Pytorch 实现 Loss_functions