Dependencies:
dpm-https://people.eecs.berkeley.edu/~rbg/latent/
libsvm-http://www.csie.ntu.edu.tw/~cjlin/libsvm/
spsstereo-http://ttic.uchicago.edu/~dmcallester/SPS/ (optional, can CV toolbox disparity)
Matlab Computer Vision Toolbox
To Run: Kitti Data structure: ./data_road_right/[training|testing] ./data_road/[training|testing] ./data_car_left/[training|testing]
run format_calib.sh (set CALIB_DIR to data_x/.../calib) filter_car_data.sh (set LABEL_DIR to data_x/.../label_2) spsstereo_process.sh (set directories to Left and Right images) To get data processed in formats code uses, set in globals.
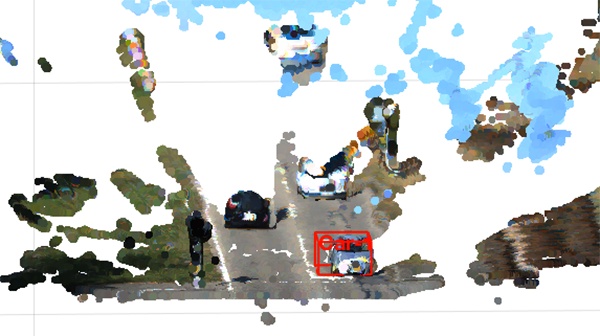
p2main.m is a script that will generate a 3d point cloud with 3d bounding boxes for detected cars and also output a 2d image with 3d boxes represented in 2d along with the road classifier segmentation result.
fitPlanePipe.m can be used to fit a plane to the surface of the road
#Example Results