Author: HanZhuo
Last updated: 2024/11/17
unitree_guide中用到了有限状态机(FSM),FSM主要用于管理和控制机器人的行为,例如机器人的站立、姿态控制、前进等状态。unitree_guide中关于FSM的源码详见FSM文件夹。
下图是通过宇树遥控器进行状态转换的方法。
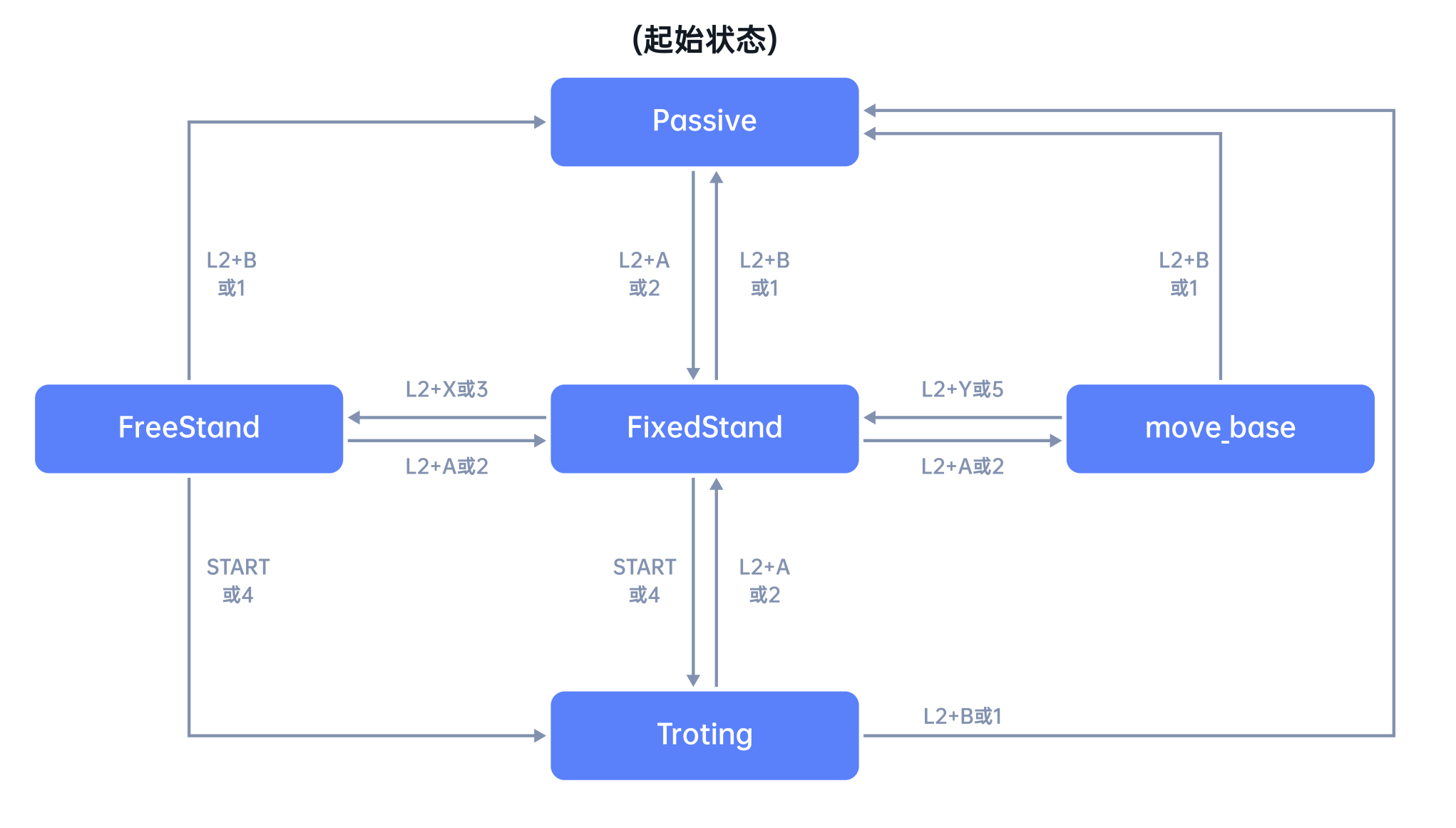
下面具体介绍状态机。
Passive
机器人所有的关节电机被设置为阻尼模式,就是设置关节的期望转动速度为 0 rad/s 且刚度系数(Kp)设置为0.此时关节转动速度越大,相应地也会收到一个越大的阻力,继而快速降低关节的转动速度。如果此时机器人正处于站立状态,机器人将会在重力的作用下缓慢趴下。
FixedStand
机器人所有的关节将会缓慢转动到一个给定的关节角度然后锁定。例如你可以将给定的关节角度设置为机器人站立时的关节角度,即可实现机器人的站立。
FreeStand
机器人可以响应宇树遥控器或键盘的控制指令,来控制机器人原地站立时的身体高度和姿态。
Trotting
在此状态下,用户可以控制机器人行走、转弯、停下。
首先需要先下载三个ros包: unitree_guide、unitree_ros、unitree)legged_msgs.
接下来在ros工作空间下依次下载,假设ros工作空间名称为unitree_ws
打开一个终端
cd unitree_ws/src
git clone https://github.com/unitreerobotics/unitree_guide.git
git clone https://github.com/unitreerobotics/unitree_ros.git
git clone https://github.com/unitreerobotics/unitree_ros_to_real.git
然后进入到unitree_ros_to_real目录下,将unitree_legged_msgs文件夹移动到unitree_ws/src目录下,再将unitree_ros_to_real文件夹删除,如下图所示

现在需要的功能包已经下载好,接下来编译工作空间,在unitree_ws目录下
catkin_make编译成功如下图所示:

下面我们就可以启动GO1仿真环境并通过键盘实现对GO1的控制了。
source unitree_ws/devel/setup.bash
roslaunch unitree_guide gazeboSim.launch仿真环境如下图所示:

我的配置是NVIDIA 4060RTX显卡,可以看到上图的下方FPS数据值为60+,我的仿真环境还是比较流畅的,配置低或者虚拟机的话,会比较卡顿是正常的。
source unitree_ws/devel/setup.bash
sudo ./unitree_ws/devel/lib/unitree_guide/junior_ctrl然后光标停留在这个终端中,按下键盘上2之后,机器狗就会站立起来了,如下图

有些教程中使用命令
rosrun unitree_guide junior_ctrl这样虽然一开始也可以控制机器狗完成基本动作,但是这行命令运行之后会有
[ERROR] Function setProcessScheduler failed.

为什么需要直接使用编译生成的二进制文件却不用rosrun的方式,这是因为在机器人运动过程中,需要保证期望的足端力在一个固定的频率下(500hz)求解出来,而这涉及到实时进程的知识。在程序中设置实时进程需要最高权限,所以我们需要用sudo直接运行控制器的二进制文件。
启动控制器后,当仿真环境中的机器狗趴在地上时,我们可以通过按下键盘上的“2”将FSM由Passive(初始状态)转换到FixedStand,机器狗就会站立起来了,然后再按下“4”将FSM由FixedStand转到Trotting,然后我们就可以通过键盘来控制机器狗运动了。
按键W,A,S,D可以控制机器狗平移运动:向前、左、后、右行走。
按键J,L可以控制机器狗转向:向左、右转动。
按键Spacebar即空格键会令机器狗停下并站立。
以下是FSM状态转换的按键:
- Key '1': FixedStand/FreeStand to Passive
- Key '2': Passive/Trotting to FixedStand
- Key '3': Fixed stand to FreeStand
- Key '4': FixedStand/FreeStand to Trotting
- Key '5': FixedStand to MoveBase
- Key '8': FixedStand to StepTest
- Key '9': FixedStand to SwingTest
- Key '0': FixedStand to BalanceTest
有两种方式:宇树SDK控制和ROS控制。
通过ssh进入GO1运动板卡里面,找到里面的unitree_legged_sdk,里面应该是还未经过编译的,在实验室的GO1-7里面,我编译后未能成功控制实体运动,于是我从外部导入了新的unitree_legged_sdk,放到主目录,已经编译好了,可以成功控制实体GO1运动,里面有五个example程序:

例如程序example_walk,运行方法如下:
cd到程序所在目录,输入以下命令
sudo ./example_walk运行程序后,GO1实体机器狗将会做出相应动作。
unitree_legged_sdk中除了cpp还有py程序文件
cd unitree_legged_sdk/example_py
首先需要下载几个github上宇树的包,下载时注意版本号,我会在下面说明版本的。
先给大家看一下下载好后的功能包(见下图)有三个包已经下载好了,那么还需要下载unitree_legged_sdk和unitree_legged_real,忽略zhuo_go1

接下来开始操作!
下载unitree_legged_real:
git clone -b foroldsdk https://github.com/unitreerobotics/unitree_ros_to_real.git下载unitree_legged_sdk:
git clone -b v3.5.1 https://github.com/unitreerobotics/unitree_legged_sdk.git
(这里下载的都不是最新版本,最新版本大家感兴趣的话可以试一下)
接下来将工作空间编译一下,然后按照unitree_ros_to_real的说明操作。
连接GO1的WIFI,然后打开一个终端,输入ifconfig查看自己电脑的信息

我们需要的是第二部分的网口名称enp8s0,每个人的具体名称会不一样,然后修改unitree_legged_real下的ipconfig.sh文件,将其中的enx000ec6612921改为自己的就可以了,之后打开终端
sudo chmod +x ipconfig.sh
sudo ./ipconfig.sh这时就将端口信息和IP设置好了,不过这条命令是临时的,如果需要自动设置端口信息,进行下面的操作
sudo gedit /etc/network/interfaces打开interfaces后,将下面四行添加进去,然后保存退出
auto enp8s0
iface enp8s0 inet static
address 192.168.123.162
netmask 255.255.255.0记得要将enp8s0改为自己的端口名称。
3.2.1 网线连接
网线一端插入GO1背部的网口,另一端插入自己电脑网口,然后将自己电脑的IP改为123网段下的地址与机器狗处于同一局域网下。

这里使用的地址是192.168.123.162,大家也可以使用这个,因为刚刚大家在interfaces时用到的地址便是这个,两者保持一致就可以了。
现在就可以启动ROS程序控制GO1了。
首先启动ros消息与udp命令转换的程序
roslaunch unitree_legged_real real.launch ctrl_level:=highlevel除了highlevel也可选择lowlevel,这个指的是控制频率的高低
然后启动键盘控制程序,这里包含响应键盘事件发布速度的ros消息和ros消息订阅并将消息发送给real.launch,real.launch接收到消息立即发送给机器狗。
这里用到的按键有W、A、S、D、J、L这几个按键与前面仿真里的用法一样,另外还有按键Q用于终止程序,如果是按其他的按键是令机器狗停下。
如果你按下按键却没有响应,可以按照下面的连接解决。
https://github.com/MAVProxyUser/YushuTechUnitreeGo1/blob/main/README.md#ros1-examples
或者直接用我改好的也可以:
git clone https://github.com/Benxiaogu/unitree_go1.git只需要将unitree_go1里面的unitree_legged_real文件夹放到你的工作空间里面就可以了。
然后使用catkin_make重新编译一下,重新运行上面的两个程序,这时正常的话就可以控制 GO1 前后左右移动和向左向右转动了。