(Cascaded Sunray Server And Rover Application)
CaSSAndRA ist eine Python-Server-Anwedung, die es einem erlaubt den Ardumower (oder Alfred) mit der Sunray Firmware zu steuern. Die Serveranwendung läuft auf einem separatem Rechner und kann über einen der drei Wege mit der Sunray Firmware kommunizieren:
- HTTP (Post requests)
- MQTT
- UART (serieller Port)

Installation und Nutzung der App erfolgt auf eigene Gefahr. Ich übernehme keinerlei Haftung für die entstandenen Schäden durch die Nutzung der App. Es handelt sich hierbei um meinen Hobby-Projekt, der bei euch nicht funktionieren muss. Eurer Roboter muss mit einem Not-Aus Schalter ausgerüstet sein. Bei der Bedienung des Roboters aus der App bitte haltet immer Sichtkontakt zu dem Roboter und im Falle des unerewarteten Verhaltens schaltet diesen sofort über Not-Aus Schalter aus. Wenn Ihr damit einverstanden seid, dann fährt mit der Installation fort.
Installation für linuxbasierte Betriebssysteme (alle Befehle werden im Terminal ausgeführt): Als erstes muss die Repository heruntergeladen werden. Oder für die Profis unter euch einfach clonen (Achtung! In diesem Beispiel ist ardumower der Username unter dem alles installiert wird. Ersetzt ardumower durch euren Username unter dem das System läuft).
Entpackt die Dateien in den Ordner eurer Wahl (z.B.):
/home/ardumower/CaSSAndRA
Navigiert in den geclonten/entpackten Ordner:
cd /home/ardumower/CaSSAndRA
Installiert die Abhängigkeiten, dazu im Terminal folgendes eingeben:
pip install -r /home/ardumower/CaSSAndRA/requirements.txt
danach könnt Ihr erst mal Kaffee holen gehen, denn das kann dauern. Bitte achtet drauf, dass die Installation ohne Fehlern abgeschlossen wird (Warnings können ignoriert werden).
Wenn euch das Betriebssystem mit -bash: pip command not found begrüßt, müsst Ihr noch pip nachinstallieren:
sudo apt install python3-pip
Prüft bitte mit folgendem Befehl den Bibliothekenpfad eurer pip-Installation:
python3 -m site --user-site
Wechselt bitte in den Bibliothekenpfad(z.B.). Achtung beim 64bit System kann der Ordner lib64 heißen:
cd ./local/lib/python3.9/site-packages
Sucht den dash_daq Ordner und wechselt dahin:
cd dash_daq
Kopiert die dash_daq.min.js Datei aus der von euch geclonten Repository in den dash_daq Bibliotheken-Ordner und ersetzt die vorhandene Datei:
cp /home/ardumower/CaSSAndRA/bugfix_dash_daq_min/dash_daq.min.js dash_daq.min.js
Es hat sich herausgestellt, dass besonders Raspberry Pi OS 32bit (bullseye) bei der Installation der Pandas Bibliothek Probleme bereiten kann. Deutlich reibungsloser funktioniert es mit der 64bit Version. Solltet Ihr Probleme bei der Installation auf der Raspberry Pi OS haben, prüft als erstes welche Version von Raspberry Pi OS auf eurem Einplatinencomputer läuft:
uname -r
Kommt als Antwort armv7l, dann habt Ihr 32bit Version. Kommt als Antwort aarch64, dann habt Ihr 64bit Version und die Ursache für das Problem liegt woanders.
Für die 32bit Version von bullseye müssen vorher auf dem Raspberry Pi noch folgendes nachinstalliert werden:
sudo apt install libatlas-base-dev libgeos-dev
CaSSAndRA das erste mal starten (alle Befehle, bis auf den letzten Aufruf (dieser erfolgt im Browser) werden im Terminal ausgeführt):
Wechselt in den Ordner, wo eure app.py Datei liegt. Habt Ihr nach der Installation den Ordner nicht verschoben dann ist in den Ordner wie folgt zu wechseln:
cd /home/ardumower/CaSSAndRA/CaSSAndRA
Startet die App mit:
python3 app.py
Der erfolgreiche Start wird mit ein paar Warnings und INFO Dash is running on xxx:8050 quitiert:
2023-04-28 08:38:24 INFO Dash is running on http://0.0.0.0:8050/
* Serving Flask app 'app'
* Debug mode: off
2023-04-28 08:38:24 INFO Backend: Try initial HTTP request
Herzlichen Glückwunsch die App ist erfolgreich gestartet und man kann die App im Browser eurer Wahl aufrufen:
http://IP-des-Rechners:8050
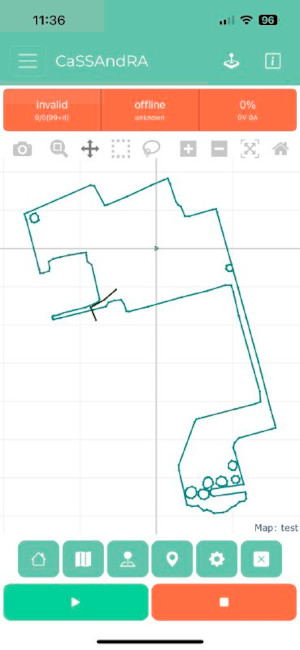
Die App sollte euch jetzt mit 3 roten Ampeln begrüßen:
Um den Server zu stoppen drück im Terminal Strg+C
Um CaSSAndRA bei jedem Systemstart automatisch ausführen. Kann die Ausführung der Anwendung über systemd realisiert werden. Checkt, ob auf eurem System systemd vorhanden ist:
systemd --version
Sollte eine Meldung kommen, dass systemd nicht gefunden wurde, dann muss dieser nachinstalliert werden, oder wird dieser von eurem Betriebssystem nichzt unterstützt. Dann bitte an dieser Stelle abbrechen.
Als nächstes legen wir eine neue service Datei an:
sudo nano /etc/systemd/system/cassandra.service
Die geöfnete Datei füllt Ihr mit folgenden Iformationen:
[Unit]
Description=CaSSAndRA
After=multi-user.target
[Service]
#Euer Benutzername
User=ardumower
Type=simple
Restart=always
#ExecStart: ggf. Pfad zu eurer app.py anpassen
ExecStart=python3 /home/ardumower/CaSSAndRA/CaSSAndRA/app.py
[Install]
WantedBy=multi-user.target
Datei speichern und schliessen.
Als nächstes muss daemon neuegeladen werden:
sudo systemctl daemon-reload
Aktiviert die Ausführung bei jedem Start:
sudo systemctl enable cassandra.service
Und zum Schluss startet den Service:
sudo systemctl start cassandra
Prüft den Status:
sudo systemctl status cassandra
Als Ausgabe kommt(wichtig ist das Wort active(running)):
cassandra.service - CaSSAndRA service
Loaded: loaded (/etc/systemd/system/cassandra.service; enabled; vendor preset: enabled)
Active: active (running) since Thu 2023-04-27 07:48:22 CEST; 1 day 5h ago
-
Dateien aus dem git herunterladen
-
die Datei requirements.txt in das Unterverzeichnis mit dem File app.py verschieben/kopieren
-
in das Verzeichnis mit der Datei app.py wechseln
-
group-id und user-id des aktuell genutzten Users herausfinden (id -u, id -g)
-
Username, Gruppenname (des aktuellen Users) merken
-
ein File "dockerfile" mit folgendem Inhalt anlegen (USERNAME, GROUP, GROUP-ID und USER-ID mit den herausgefundenen Daten ersetzen):
FROM python:3.10-slim RUN addgroup --gid <GROUP-ID> <GROUP> RUN adduser --gecos "" --disabled-password --uid <USER-ID> --gid <GROUP-ID> <USERNAME> WORKDIR /usr/src/cassandra COPY requirements.txt . RUN pip install --upgrade pip RUN pip install -r requirements.txt COPY . . RUN chown -R <USERNAME>:<GROUP> /usr/src/cassandra RUN chmod 777 /usr/src/cassandra USER <USERNAME> CMD ["python3","app.py"]
Beispiel:
FROM python:3.10-slim
RUN addgroup --gid 65548 ardumower
RUN adduser --gecos "" --disabled-password --uid 1053 --gid 65548 ardumower
WORKDIR /usr/src/cassandra
COPY requirements.txt .
RUN pip install --upgrade pip
RUN pip install -r requirements.txt
COPY . .
RUN chown -R ardumower:ardumower /usr/src/cassandra
RUN chmod 777 /usr/src/cassandra
USER ardumower
CMD ["python3","app.py"]
-
Image erstellen
docker build -f dockerfile -t <IMAGENAME> .
Beispiel:
sudo docker build -f dockerfile -t cassandra:slim .
-
Dann den Container starten (NETWORK ist ggf. optional):
docker run -e TZ=Europe/Berlin -p 8050:8050 -v <PFAD-ZUM-data-FOLDER>:/usr/src/cassandra/src/data --name cassandra --network="<NETWORK>" -d <IMAGENAME>
Beispiel:
docker run -e TZ=Europe/Berlin -p 8050:8050 -v /home/ardumower/cassandra/data:/usr/src/cassandra/src/data --name cassandra --network="netz1" -d cassandra:slim
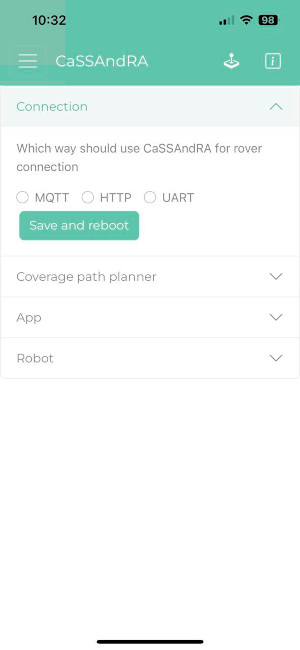
In der App klickt auf "Settings". Auf der Seite wählt "Communication". Sucht euch eine der Möglichkeiten aus, trägt die Daten ein (bitte haltet die Syntax, was CaSSAndRA euch vorschlägt,bei) und anschliessend mit "save and reboot" werden die Einstellungen übernommen und der Server neuegestartet:
Wenn Ihr zurück auf die Startseite wechselt (z.B. durch click in der Navbar auf CaSSAndRA) und die Verbindung hat geklappt, sollten einige Ampeln nicht mehr auf rot sein.
Unter Settings "Map and position" wählen. Hier bitte eure Positionsberechnung unbedingt anpassen (absolute oder relative). Die restliche Einstellungen sind selbserklärend. Einige Einstellungen werden akutell bei der Berechnung der Mähwege nicht berücksichtigt. Vor dem schliessen mit "save and reboot" die Änderungen spechern und den Server neuestarten
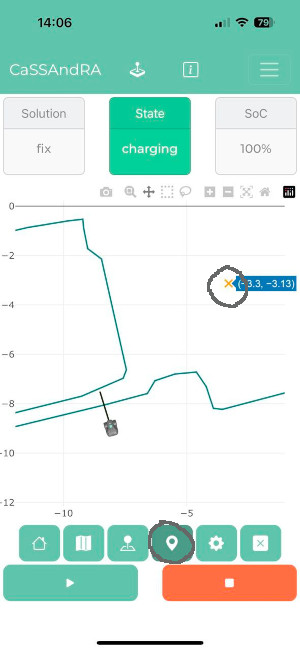
Unter Settings "App" wählen. Hier gibt es die Möglichkeiten einige Anzeigen in der App eurer Konfiguration anzupassen.
-
Maximale Haltedauer eurer Messdaten ein. Abhängig von euren zur Verfügung stehenden Ressourcen (Der notwendiger Speicherplatz muss noch ermittelt werden, sollte um die 100MB bis 200MB pro Monat betragen)
-
Die Zeit "ab Verbindung verloren bis Status wechselt zu offline". Läuft die Verbindung über MQTT oder HTTP und Ihr habt keine flächendeckende WiFi Abdeckung im Garten, wählt die Zeit entsprechend hoch
-
Mindeststromstärke, ab der die Anzeige vom "docked" zu "charging" wechseln soll (Achtung: es muss ein negativer Wert sein)
-
SoC Anzeige. Umrechnung Spannung zu Ladezustand (einfache lineare Interpolation). Als Voltage min (0%) wird die Abschaltspannung aus der config.h eurer sunray FW +0,5V empfohlen. Als Voltage max (100%) wird die Ladeschlussspannung aus der config.h eurer sunray FW -0,5V empfohlen. Die SoC Anzeige hat keinerlei steuerende Funktion und dient lediglich einer Übersicht auf der Startseite
Eine neue Karte oder bereits vorhandene Karte kann im Bereich Mapping erstellt/geändert werden.
In der App klickt auf "Mapping". Um eine vorhandene Karte zu ändern, wählt im Bereich "saved perimeters" die gewünschte Karte. Nun kann mit der Bearbeitung gestartet werden. Eine zusätzliche Sicherung der vorhandenen Karte vor der Bearbeitung ist nicht notwendig. Nach dem Fertigstellen der Karte wird man aufgefordert die bearbeitete Karte in einem separaten Slot zu speichern. Um eine neue Karte zu erstellen klickt auf das Dateisymbol mit dem Plus im Berech "saved perimeters".
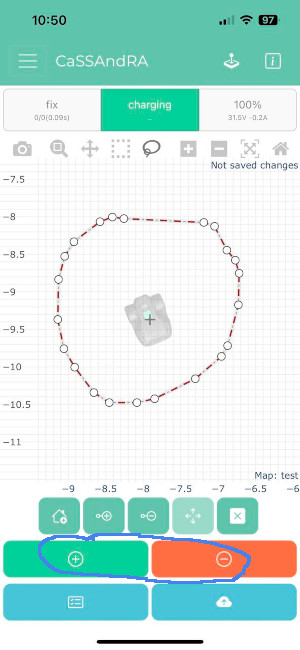
Positioniert den Roboter an der Stelle, wo ein neuer Punkt aufgezeichnet soll und drückt auf "add new point" zum hinzufügen einer neuen Koordinate oder "remove last point" zum Löschen der letztgesetzten Koordinate.

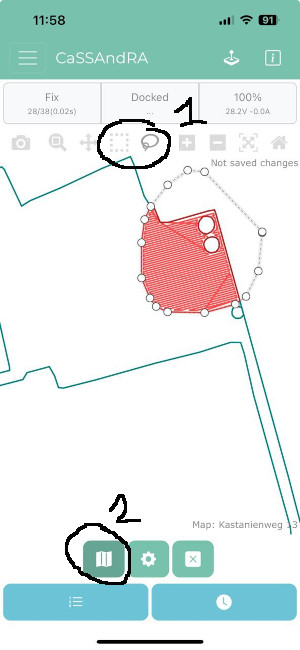
Ist die Figur fertig kann diese der Fläche hinzugefügt werden (Perimeter), oder aus der Fläche entfernt werden (Exclusion). Hierzu klickt auf die entsprechende Buttons.
Um eine Figur zu erstellen können bereits bekannte Werkzeuge Box-Select oder Lasso-Select genutzt werden. So funiktioniert z.B. auch das Löschen einer Exclusion umkreist die Exclusion mit Lasso-Select und wählt zur Fläche hinzufügen. Die neue Figur wird dem Perimeter hinzugefügt und überklebt sozusagen die vorhandene Exclusion.
Um einen Dockpfad aufzuzeichnen selektiert hierzu das Symbol mit dem Haus. Danach kann mit den Buttons "add new point" und "remove last point" der neue Dockpfad aufgezeichnet werden. Wenn ein neuer Dockpfad aufgenommen wurde oder ein vohandener überarbeitet wurde merkt das CaSSAndRA und beim Speichern des neuen Perimeters verschiebt CaSSAndRA den letzten Dockpoint automatisch um 10cm in die Dockrichtung um das sichere Andocken zu gewährleisten.
Wenn das neue Perimeter aufgenommen wurde kann das mit entsprechednen Button bestätigt werden und CaSSAndRA fordert euch auf einen neuen Namen für die erstellte Karte zu wählen.
Es gibt die Möglichkeit eine Karte, die in der Sunray App ersstellt wurde zu importtieren.
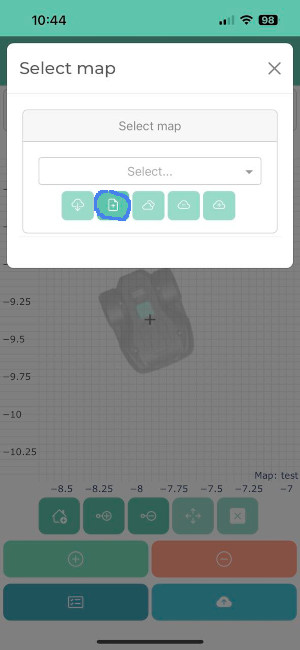
Im Bereich "Upload sunray file" klickt auf den Button mit "txt-Datei-Icon".
Wählt eure Sunray-Export Datei.
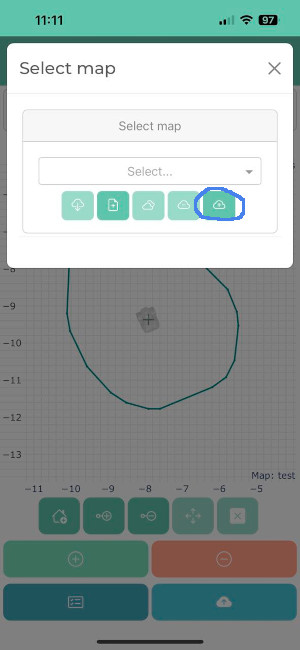
Im Dropdownmenü könnt Ihr jetzt die gewünschte Karte auswählen.
Ein Vorschau der Karte wird in Rot angezeigt mit dem Hinweis "From upload (please save first)".
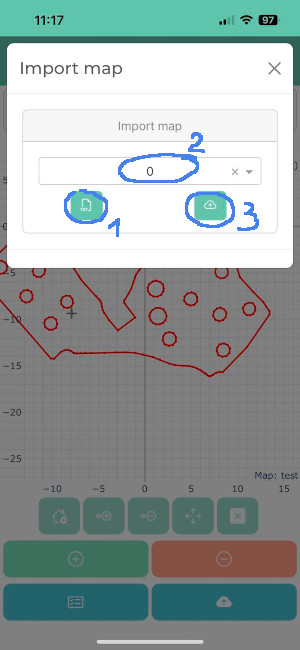
Um die gewünschte Karte zu speichern klickt auf die Wolke mit Plus.
Im poup-Menü wählt einen eineindeutigen Namen und klickt OK.
Die Karte wird gespeichert und kann im Berech "Saved perimeters" im Dropdownmenü ausgewählt werden.
Mit der Wolke mit dem ausgehenden Pfeil kann die Karte aktiv geschaltet werden.
Wechselt auf die Startseite. Die neue Karte wird in der Übersicht angezeigt und kann verwendet werden.
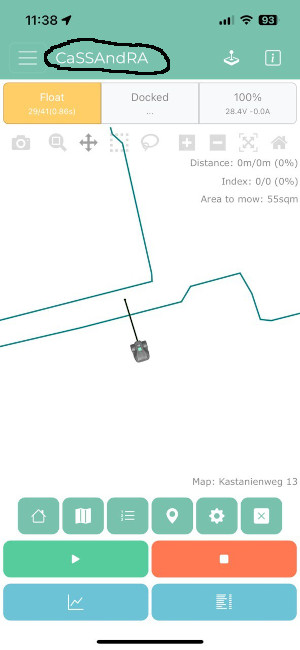
Auf der Übersichtsseite (zu erreichen über Betätigen CaSSAndRA Schriftzug im oberen Bildschirmberech) kann dem Roboter eine Aufgabe zugewiesen werden.
Klickt auf das Häuschen-Symbol und anschliessend auf Play -> Der Mäher kehrt zur Ladestation zurück
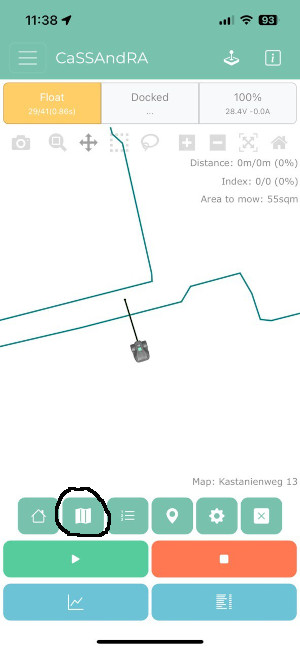
Klickt auf das Karten-Symbol (rechts neben dem Häuschen-Symbol). CaSSAndRA berechnet die Mähwege nach euren Einstellungen. Je nach Leistung eures Rechners bzw. der Größe der Karte kann die Berechnung etwas dauern. Die berechneten Wege erscheinen grün auf der Karte. Anschliessend klickt auf Play -> der Mäher fängt an die gesamte Fläche zu mähen
Klickt auf das Karten-Symbol mit einer Pinnadel (rechts neben dem Karten-Symbol). Wählt im oberen Kartenbereich Box Select oder Lasso Select Werkzeug. Markiert anschliessend auf der Karte die gewünschte Fläche. Je nach Leistung eures Rechners bzw. der Größe der Karte kann die Berechnung etwas dauern. Die berechneten Wege erscheinen grün auf der Karte. Anschliessend klickt auf Play -> der Mäher fängt an die ausgewählte Fläche zu mähen
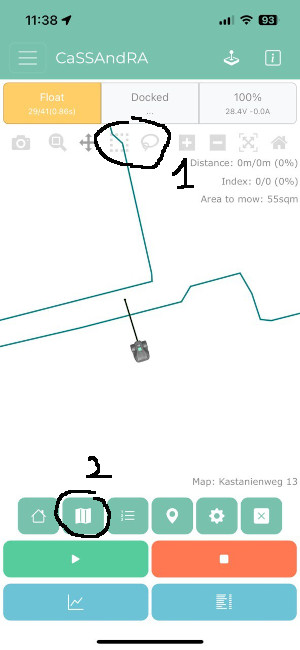
Klickt auf das Positions-Symbol (rechts neben dem Karten-Symbol mit einer Pinnadel). Klickt auf der Karte auf die gewünschte Position. Anschliessend klickt auf Play -> der Mäher fährt zu der gewünschten Position auf der Karte
Aktuelle Einschränkungen: Befindet sich die Ladestation außerhalb des Perimeters und der Mäher soll aus der Ladestation zum gewünschten Punkt fahren, wird die Aufgabe mit einem Fehler abgebrochen
Klickt auf das Zahnradsysmbol. Es können diverse Mäheinstellungen vorgenommen werden. Diese Einstellungen werden nicht gespeichert und wirken sich nur temporär aus. Wird der Server neuegestartet so werden die Werte aus dem Settingsbereich übernommen
Klickt auf das Symbol mit dem X (rechts neben der Zahnradsymbol) so wird die ausgewählte, nicht gestartete Aufgabe abgebrochen
Klickt auf Burgermenü und wählt Taskplanner.
Sollte bereits eine Aufgabe geladen sein, dann klickt auf das Blattpapier-Button mit dem Plus Zeichen im "saved tasks" Bereich. Benutzt das Zahnrad um die Mäheinstellungen für die geplannte Aufgabe anzupassen. Klickt anschliessend auf den Button Karte (links neben dem Zahnradsymbol) für die Aufgabe auf der ganzen Karte oder selektiert mit Lasso-Werkzeug oder Boxselect-Werkzeug den gewünschten Bereich auf der Karte. Ein Vorschau der Aufgabe erscheint in rot. Um die Aufgabe zu speichern klickt im Bereich "saved tasks" auf die Wolke mit dem Plus Zeichen. Gibt der Aufgabe einen eindeutigen Namen. Jetzt kann die Aufgabe im Dropdown Menü ausgewählt werden.
Soll eine bestehende Aufgabe erweitert werden. Wählt im Dropdownmenü die zu ändernde Aufgabe. Diese erscheint grün auf der Karte. Erzeugt zusätzliche Aufgabe wie unter "Erstellen einer Aufgabe" beschrieben eine zusätzliche Aufgabe. Diese erscheint rot auf der Karte. Speichert die Aufgabe unter einem neune Namen in dem Ihr auf die Wolke mit dem Plus Zeichen drückt.

Wählt im Dropdown Menü die gewünschte Aufgabe. Klickt auf die Wolke mit dem ausgehenden Pfeil im "saved tasks" Bereich
Wählt im Dropdown Menü zu löschende Aufgabe. Klickt auf die Wolke mit Minus Zeichen im "saved tasks" Bereich
Die Aufgaben sind aktuell geladednen Karte zugeordnet, sollte diese Umgeschaltet werden, stehe die Aufgaben erst dann zur Verfügung wenn die Karte wieder geladen ist.
Wird eine Karte gelöscht, so werden ohne Vorwarnung auch alle Aufgaben gelöscht, die mit dieser Karte erstellt wurden
Der Taskplanner rechnen die Mähwege immer neue nach dem die Aufgabe gestartet wurde. Es werden keine gespeicherten Wege geladen. Je nach Umfang der Aufgabe und die Leistung eures Rechners kann das einige Zeit in Anspruch nehmen
Die App wird von mir in kleinen Schritten verbessert bzw. die gemeldeten Probleme behoben. Um die Änderungen auch bei euch produktiv zu schalten, geht beim Update wie folgt vor.
- Sichert euren /src/data Ordner
- Clont erneuet die Repository und ersetzt alle Dateien und Ordner in eurem Produktivverzeichnis durch die neuen heruntergeladenen Dateien.
- Ersetzt den herunntergeladenen /src/data Ordner durch den im Schritt 1 von euch gesichrten Ordner.
- App kann wie gwohnt gestartet werden