FASTLAB 自主导航无人机硬件
0.概要
本项目主要介绍浙江大学FASTLAB实验室使用的自主导航无人机的硬件组成与搭建,本无人机可应用于无人机在未知环境中的自主飞行,集群飞行等等,以下工作都以本无人机为基础:Ego-Planner Ego-Swarm CMPCC Fast-Tracker Fast-Racing 等
1. 无人机硬件基本组成

-
一个可以用遥控器控制飞行的无人机,需要的基本硬件有:*机架,电机,电调,飞控,接收机,遥控器,锂电池,BB响(电压计)*等
-
自主导航无人机在基本硬件基础上,还需要双目相机用于视觉定位,机载电脑用于运行导航算法等等。
下表为各部件型号,数量,与购买链接
其中,飞控可选型号为CUAV NORA,V5+,X7,其他支持px4固件的飞控也可选用。机载电脑可选用DJI MANIFOLD 2-C 或 JETSON XAVIER NX。
3D打印件与碳板的STL模型可以在model目录下找到
2. 三维模型拆解
- 机载电脑挂载MANIFOLD 2-C:
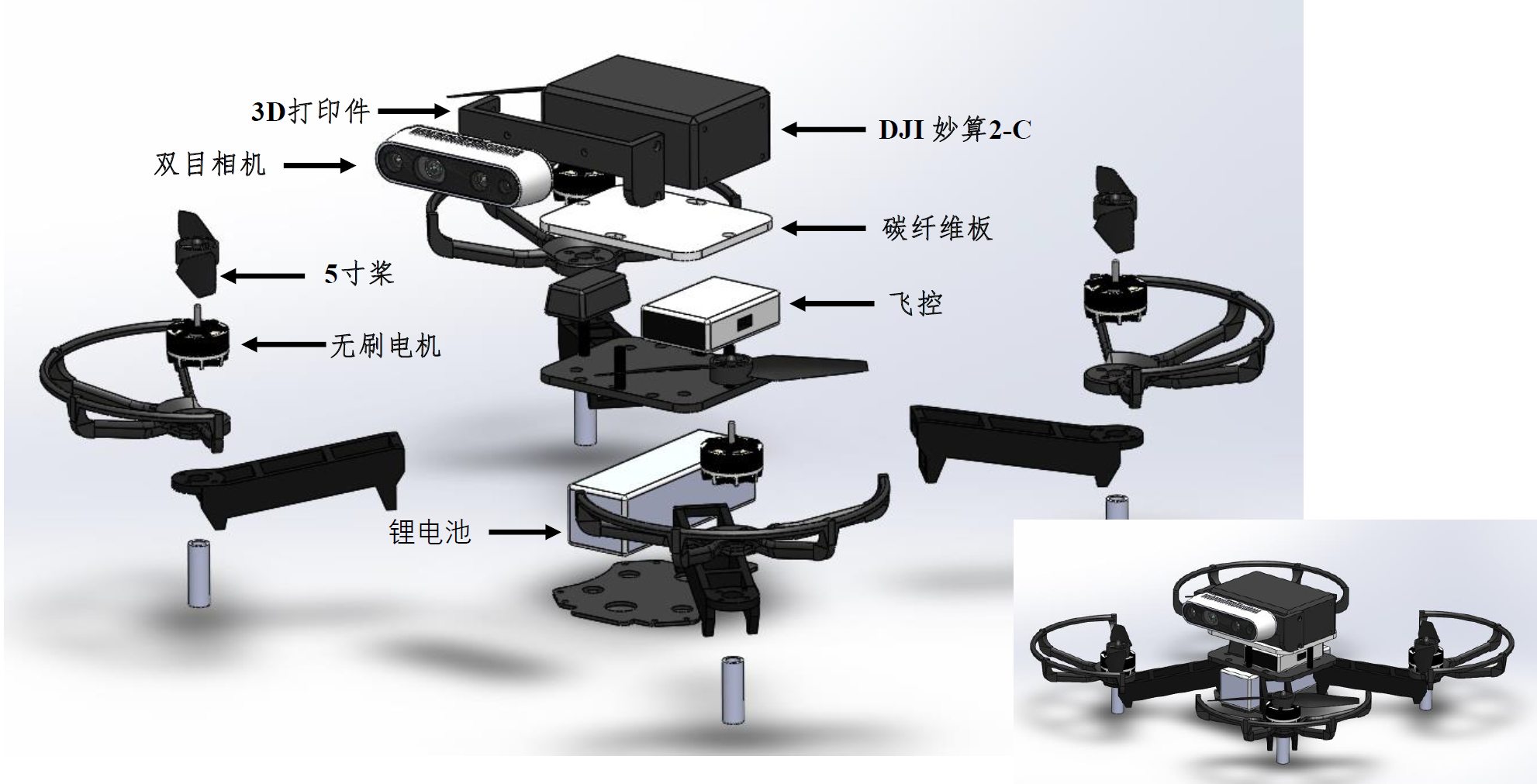
-
机载电脑挂载XAVIER NX:待更新

3. 机载电脑环境
本无人机运行Ubuntu 16.04/18.04 与 ROS Kinetic/Melodic,相关安装说明详见 ROS安装
4. 装机
装机主要难点在于动力套件的焊接与飞控的设置及调试,请移步assemble.pdf机载电脑的安装可以根据不同的机载电脑自己安装。