Sherloc is a secure and holistic control-flow violation detection mechanism for microcontroller-based embedded systems. This repository contains the source code, examples, and evaluation tools to run and evaluate Sherloc. We have implemented Sherloc for the ARMv8-M architecture and evaluated it with the Cortex-M33 microcontroller on the ARM V2M-MPS2+ Evaluation Board.
The results of this project were published in the paper entitled "SHERLOC: Secure and Holistic Control-Flow Violation Detection on Embedded Systems" in the ACM Conference on Computer and Communications Security (CCS) 2023. If you want to cite our paper in your work, please use the following BibTeX entry.
@inproceedings{tan2023sherloc,
title = {SHERLOC: Secure and Holistic Control-Flow Violation Detection on Embedded Systems},
author = {Tan, Xi and Zhao, Ziming},
booktitle = {ACM Conference on Computer and Communications Security (CCS)},
year = {2023},
}
This repository is organized into three main directories:
- Sherloc_runtime: Sherloc implementation.
- Example: various example applications to demonstrate Sherloc's functionality.
- host_tool: tools for static analysis and evaluation of Sherloc.
- Environment prerequisites
- Hardware: MPS2+ board
- System: Windows. We have tested on Windows 11. Windows 10 may also work.
- Software: licensed Keil uVision5, python3, Jupyter notebook
- Required Python libraries: please refer to
host_tools/evaluation/requirements.txt
- Required Python libraries: please refer to
- Knowledge prerequisites
- C and Python programming languages.
- Keil uVision5 IDE and Jupyter notebook.
- Serial port communication and logic analyzer.
- Cortex-M33 architecture.
This folder contains the Sherloc implementation and is organized into the following sub-folders:
- src: source code for Sherloc.
- inc: header files for Sherloc.
- src: source files for Sherloc.
- To see the full implementation of Sherloc, please check the code located at MACRO
FULL_IRQ.
- To see the full implementation of Sherloc, please check the code located at MACRO
- inc: header files for Sherloc.
- lib: evaluation functions.
- freertos: FreeRTOS kernel code.
- evaluation: BEEBS source code for evaluation purposes.
This folder contains the following example applications:
- Sherloc_Blinky_S_NS: Demonstrates Sherloc on a bare-metal system.
- Sherloc_FreeRTOS_MPU_S_NS: Demonstrates Sherloc on a FreeRTOS system with MPU enabled.
- Sherloc_S_NS: Demonstrates Sherloc on BEEBS benchmarks.
- Trigger_S_NS: Demonstrates Sherloc on FreeRTOS system that uses LED
- Vulfoo_S_NS: Implements a stack-overflow bug inside a FreeRTOS task to test Sherloc's detection efficiency.
- Vulfoo_Task_S_NS: Implements a simple demo that an attacker can arbitrary modify FreeRTOS's task context.
- Additionally, the out folder is used for evaluation purposes and contains the
out/evalsub-folder, which has the compiled protected system inO3andOzoptimization levels separately.- Our repo already has the evaluation results you can check, which contain the following:
- elf_s: Sherloc runtime for different evaluation purposes. They are re-compiled Sherloc runtime, copying from
Sherloc/host_tools/evaluation/elf_s - Oz/O3: contains the metadata and evaluation results of different optimization levels of protected systems. This folder involves:
- proj: build files for protected systems
- build_tmp: build logs for protected systems
- elf_ns: binaries for protected systems
- metadata: _//bin contains the IBT, IRQ entry, or task entry for RTOS. You can also check the content in _//h and _/*/dump files.
- eval_log: evaluation results for protected systems.
Inside this folder, it contains:
- eval.log: evaluation logs, which tell you the running progress
- record.log: evaluation steps record tells you what sub-steps we have already evaluated. Refer to the folder host_tools/elf_s explanation to check what those sub-steps are (consistent within the paper figure 7 and 8).
- ATTENTION 1: if you want to re-run the evaluation, please delete this file.
- Other log files: evaluation results for evaluation sub-steps.
- elf_s: Sherloc runtime for different evaluation purposes. They are re-compiled Sherloc runtime, copying from
- [Recommend] To generate evaluation results from the beginning, please check Step 2: Automatically run those examples.
- If you want to run those examples manually, please check Step 2: Manually run those examples.
- Our repo already has the evaluation results you can check, which contain the following:
This directory includes an evaluation folder, encompassing various Python scripts crucial to the project's operations.
These scripts are designed to manage project building, conduct static analysis, execute runs, perform evaluations, and analyze the results obtained from these evaluations.
-
Files for project building:
- blinky, freertos, led_trigger, vulfoo, task_vulfoo: source files and Keil xml configuration files.
- elf_s: re-compiled Sherloc runtime binaries.
- rtos: task entry list for FreeRTOS.
- ATTENTION 2: if you create a new task in FreeRTOS, please add the task name to this file.
- uvprojx: Keil xml configuration files for BEEBS.
-
Auto scripts
- ibt_analysis.py: static analysis to get the IBT.
- eval.py: helper functions declared here for the whole evaluation process.
- eval_beebs.py: python script for BEEBS evaluation.
- eval_blinky.py: python script for blinky evaluation.
- eval_freertos.py: python script for FreeRTOS, including the MPU event-triggered case.
- eval_trigger.py: python script for FreeRTOS LED event-triggered case.
- eval_vulfoo.py: python script for FreeRTOS buffer overflow attack.
- eval_run.py: python script to control which target system to be evaluated.
- ibt_checking.ipynb (optional): Jupyter Notebook script to count the IBT size. The evaluation process does not need this script, you may run it manually to check the result.
- run.ipynb (optional): Jupyter Notebook script will help you find the serial port for hardware and software reset.
- result.py: python script to read evaluation results and calculate the performance overhead.
- Configure the board loading files.
- Refer to using the Cortex-M33 IoT Kit Image on MPS2+.
- Find the file system of this board, usually the drive name is
V2M_MPS2. - Assign the
Eletter to theV2M_MPS2drive. - Open
/MB/HBI0263C/AN505, copySherloc_runtime/images.txtto this folder.
- Clone the repository to your local machine.
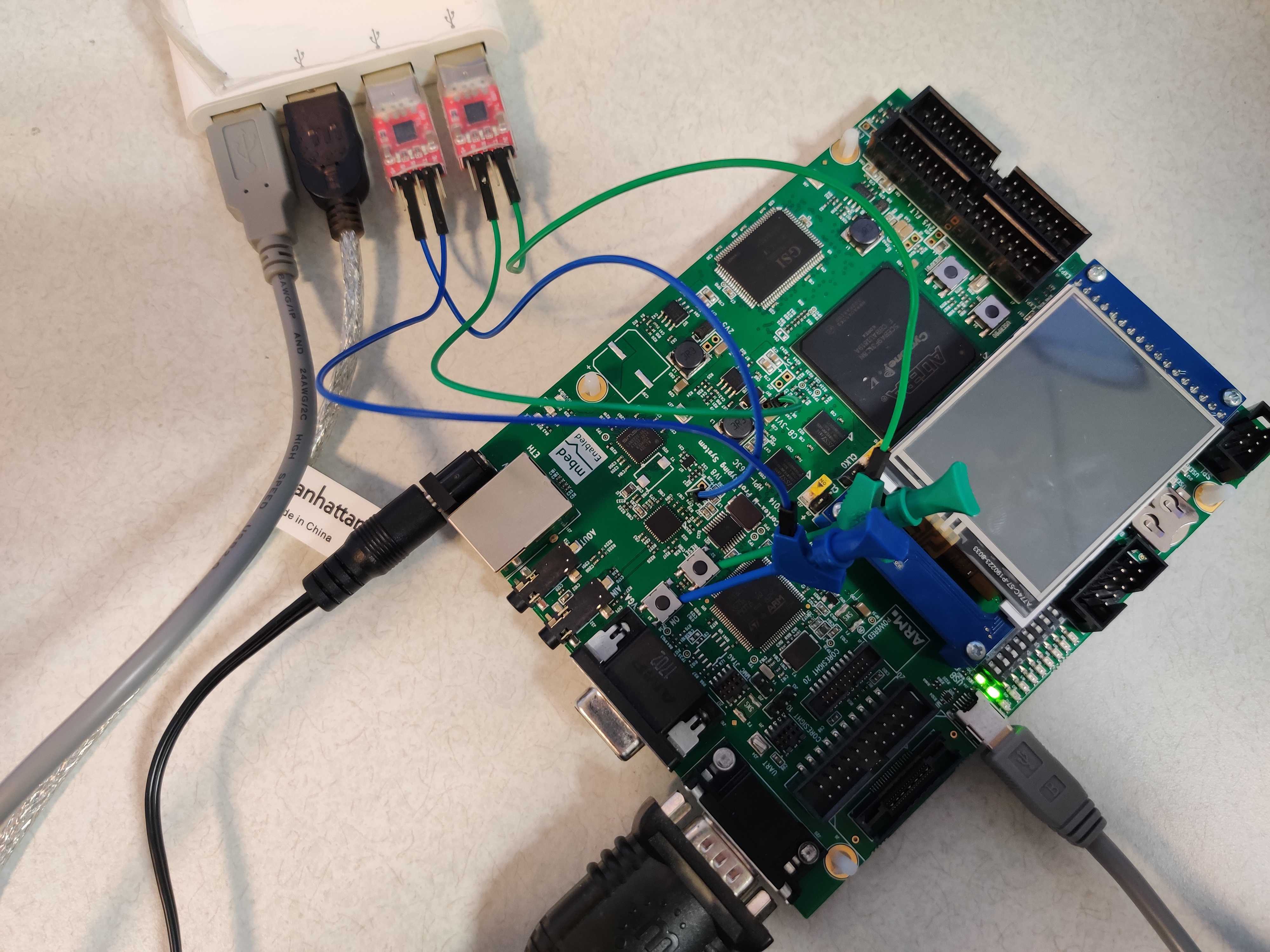
- (Optional) If you want to automatically run scripts to build, run, evaluate, and evaluate results analysis, we use two USB2TTL adaptors to simulate button pressing: one for hardware rest, one for software reset.
To make this work, you need the logic analyzer clipper * 2, jumper wire male *2, and jumper wire female /*2.
The connection wires are shown below:

- Those auto scripts do not need the Keil IDE.
- We have compiled protected systems located at
Example/out/eval/[Oz/O3]folder. - We have compiled the Sherloc runtime located at
host_tools/evaluation/elf_s. - Check the
device managerof the Windows system to figure out the hardware and software reset serial ports. We have scripts to help you find the serial and software ports for hardware reset. Please refer tohost_tools/evaluation/run.ipynbfor more details.
- Backup or delete old evaluation results, which is located at
Example/outfolder. cdto thehost_tools/evaluationdirectory.- Run
python eval_run.py. For more details, please check the implementation ofhost_tools/evaluation/eval_run.py.- ATTENTION 3: Sometimes, the board's file systems may be unstable. If you find the board cannot be detected, please re-plug the board and run the script again.
out/eval/[O3/Oz]/eval.logandout/eval/[O3/Oz]/record.logwill show the running progress. - ATTENTION 4: All
prepare*functions inside theeval_run.pywill replace the metadata (especially the IBT) generated before. If you want to keep the metadata, please comment on those functions. - ATTENTION 5: As the example
vulfooandtask_vulfoodemonstrate Sherloc's detection efficiency, the protected system will never call nsc to switch state to print out evaluation results. The log will look stuck without output.- After running this example for 1 minute, if there is no dynamic training log, you must manually stop the execution and comment
self.trigger_prepare_run()andself.trigger_emu_run(). Then re-run the board to run the next step. - The signal to show that Sherloc detects the attack is that the log will show:
or
[0]illegal transfer:0x070c0764[0] Wrong IRQ exit: 0x00201f00, 0xffffffbc, 0xffffffbd, 0x0020264c Check stack. top: 0. 0x00202588 Check task list. num: 6. 0x00201e3c 0x0020160a 0x002026a8 0x0020264a 0x00202676 0x002026a8 - To identify if those errors are true errors, refer to
out/eval/O[z/3]/metadata/*.dumpto check the address.
- After running this example for 1 minute, if there is no dynamic training log, you must manually stop the execution and comment
- ATTENTION 3: Sometimes, the board's file systems may be unstable. If you find the board cannot be detected, please re-plug the board and run the script again.
- After all the evaluations are finished, run
python result.pyto get the performance overhead. For more details, please check the implementation ofhost_tools/evaluation/result.py.
-
Navigate to the desired example application folder within the EXAMPLE directory. You may want to open the project via
Keil IDE. The Example project is a multi-project workspace, including the non-secure target protected system and the secure Sherloc runtime project.- The target protected system is in the
*_NSfolder.- Compile it accordingly.
- The Sherloc runtime is located in the folder
*_Sfolder, using the same Sherloc runtime source code for all examples. Refer toSherloc_runtime/[inc/src]folder.- Compile and run the example application according to its specific instructions controlled by
MACROS. Please check Sherloc_runtime/README.md for more details.
- Compile and run the example application according to its specific instructions controlled by
- The target protected system is in the
-
Instructions to Build and Run:
- The Keil multi-project workspace
*.uvmpwcontains projects for both the secure project, and non secure project. - Set the
_sproject as Active - Right click on "Project:_s" and select "Set as Active Project". - Build the
*_sproject using "Project --> Build" or by pressing F7. - Set the
_nsproject as Active - Right click on "Project:_ns" and select "Set as Active Project". - Build the
*_nsproject using "Project --> Build" or by pressing "F7". - Start Debug Session using "Debug -> Start/Stop Debug Session" or by pressing "Ctrl+F5".
- The Keil multi-project workspace
-
All compiled binaries are in the
outfolder. Then:- Prepare the metadata for runtime CFVD.
- 1.1. Copy the
*.axffile of the target protected system to theout/eval/O[z/3]/elf_nsfolder based on its optimization level and rename it to the target you are evaluating. You can check the TargetName in theeval_run.pyfile. - 1.2. Go to
eval_run.py, for BEEBS, and modify theself.BEEBS_NAME_listto contain the name you want to evaluate. For blinky, freertos, led_trigger, and vulfoo, modify theself.TargetNameto contain the name you want to evaluate. - 1.3. Comment out the
*_emu_run()and*_eval_run(). - 1.4. Run
python eval_run.pyto get the static analysis result. The*.binis located atout/eval/O[z/3]/metadata.
- 1.1. Copy the
- Prepare the evaluation binaries for runtime CFVD.
- Copy
*.bingenerated at step 1.4. to MPS2+ board, put it in theSOFTWAREfolder, and rename it tobs.bin. - Copy
*.axfof the target protected system to the MPS2+ board, put it to theSOFTWAREfolder, and rename it tons.axf. - Copy the Sherloc runtime compiled before to the MPS2+ board, put it to the
SOFTWAREfolder, and rename it tos.axf.
- Copy
- Software reset the board.
- Check the evaluation output.
- You can use
puttyto connect to the serial port. The baud rate is 115200. - Or you can write a Python script to read the serial port.
- The output will be like this:
Monitor Mode Debug Enabled! branch table size: 0, IRQ size: 3, Task size: 0, LOOP size: 4, tag_size: 0 ----Load branch table done.--- ----Binary search enabled.--- Hello World (Secure) NONE: 21071877
- You can use
- Prepare the metadata for runtime CFVD.
NOTE: Evaluation results can vary depending on several factors: optimization level, target system, Keil compiler version, etc.
We welcome contributions to improve Sherloc. Please submit your pull requests or open an issue to discuss your ideas.
Xi Tan: xitan@buffalo.edu
Ziming Zhao: zimingzh@buffalo.edu
Sherloc is released under the Apache License.