作者 gdou_ldh (From Guangdong Ocean University)
该项目是在 STM32 平台上运行 rt-thread 的一个四旋翼无人机系统,采用模块化的设计方法设计。将整个无人机系统细分为姿态解算、debug 调试、姿态控制、远程遥控四个模块(目前只实现了前三个,远程遥控还没写捏 0.0 ),每一个模块之间的通信采用间接引用的方式。代码风格与 Linux 内核代码风格类似,与 Robomaster 官方步兵代码风格雷同。 配套硬件:
\---application
\---inc
| ahrs_task.h
| arm_math.h
| blue_tooth_debug_task.h
| control_task.h
| filter_lib.h
| includes.h
| pid_algorithm.h
| remote_ctr_task.h
|
\---src
| main.c
| pid_algorithm.c
|
\---thread_task
ahrs_task.c
blue_tooth_debug_task.c
control_task.c
filter_lib.c
remote_ctr_task.c
- ahrs_task.c/h :是姿态解算模块的实现。
- blue_tooth_debug_task.c/h :是无人机模块的蓝牙调试和遥控模块
- control_task.c/h:是无人机控制姿态模块的实现
- fliter_lib.c/h:是无人机滤波算法库
- remote_ctr_task.c/h:是无人机远程遥控模块
- pid_algorithm.c/h:是无人机PID控制算法的实现
注: 每个模块之间通信是通过 get_xxx_handler_point() 函数返回模块的句柄实现
该示意图详细介绍了模块之间的联系和模块的详细功能

-
如果你想添加控制模式
- 在 FLYING_MODE 中添加飞行模式
- 在 control_task.c 中编写自己的控制函数
- 在 swtich_mode 中按照同样的代码方式将自己的控制函数添加进去
-
如果你想使用不同的陀螺仪
得益于 rt-thread 的完善的驱动框架,你可能只需要更改陀螺仪的初始化函数和读取函数
-
修改 ahrs_init 中的 ahrs_handler->mpu 指针,使其新指向 rt-thread 的xxx_init 陀螺仪初始化函数
-
mpu_calc_task 函数中的读取原始 accel 和 gyro 的函数需要改成 rt-thread 实现的陀螺仪驱动
默认使用的是卡尔曼滤波融合姿态, z轴加速度为二阶低通滤波 x、y轴加速度使用一阶低通滤波,实测效果最好。如果有更高级的算法,也可以加入filter_lib.c/h中(记得按照模板~)
-
-
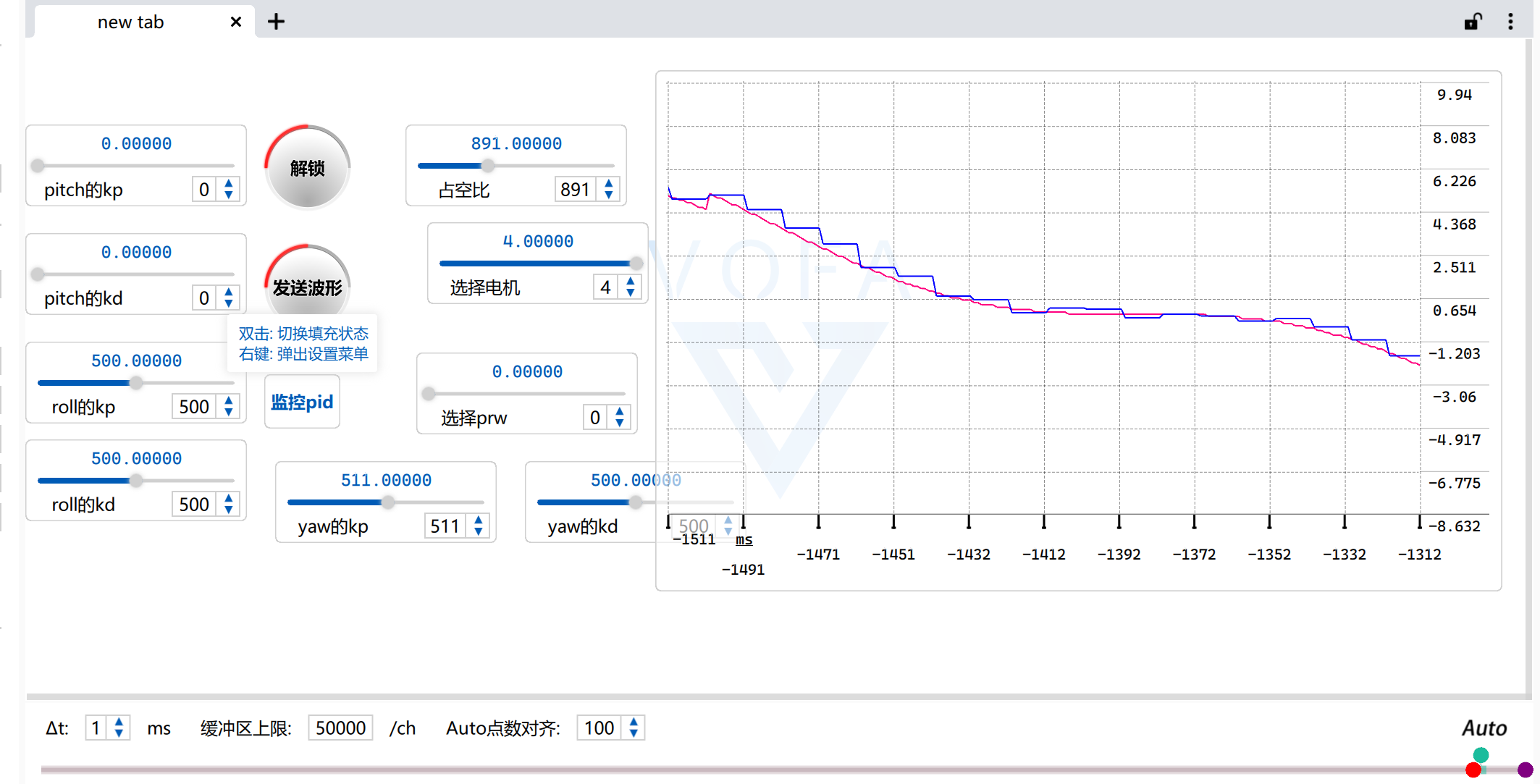
如果你想完善+修改调试方式
- 本项目目录有 vofa+ json 模板,添加自己想要的模组
- 在 blue_tooth_debug_task.h 的 sendPackage_t 结构体中添加用于保存自己模块值得变量
- 在 blue_tooth_debug_task.c 的 setv 的 name_list[] 中根据模板添加自己想要设置发送的控制量名称(最好别超过4个字符),并在 switch 中加入自己模块值的处理方式。例如 name_list 中的第一个元素是 "kp",那么在下面的switch case 0 中将 value 值 保存到 package.kp 中。