This repository proposes a general line-based SLAM system that combines points, structural and non-structural lines and aimed at improved tracking and mapping accuracy by relying on line classification, degeneracy identification and geometric constrains. By exploring the directional constraints on the original line features, the degeneracy issues associated with Plücker representation in the line triangulation process can be alleviated. More details can be found in our papers. If you have any technical questions regarding to the implementation, please kindly send email to us.
Authors: Haochen Jiang
- Start code clean and orginize. Due to the substantial volume of code and the involvement of certain compliance issues, we will progressively release and update it. The current version is not complete.
[1] Campos, Carlos, et al. "Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam." IEEE Transactions on Robotics 37.6 (2021): 1874-1890. (https://arxiv.org/abs/2007.11898)
[2] Gomez-Ojeda, Ruben, et al. "PL-SLAM: A stereo SLAM system through the combination of points and line segments." IEEE Transactions on Robotics 35.3 (2019): 734-746. (https://arxiv.org/abs/1705.09479)

-
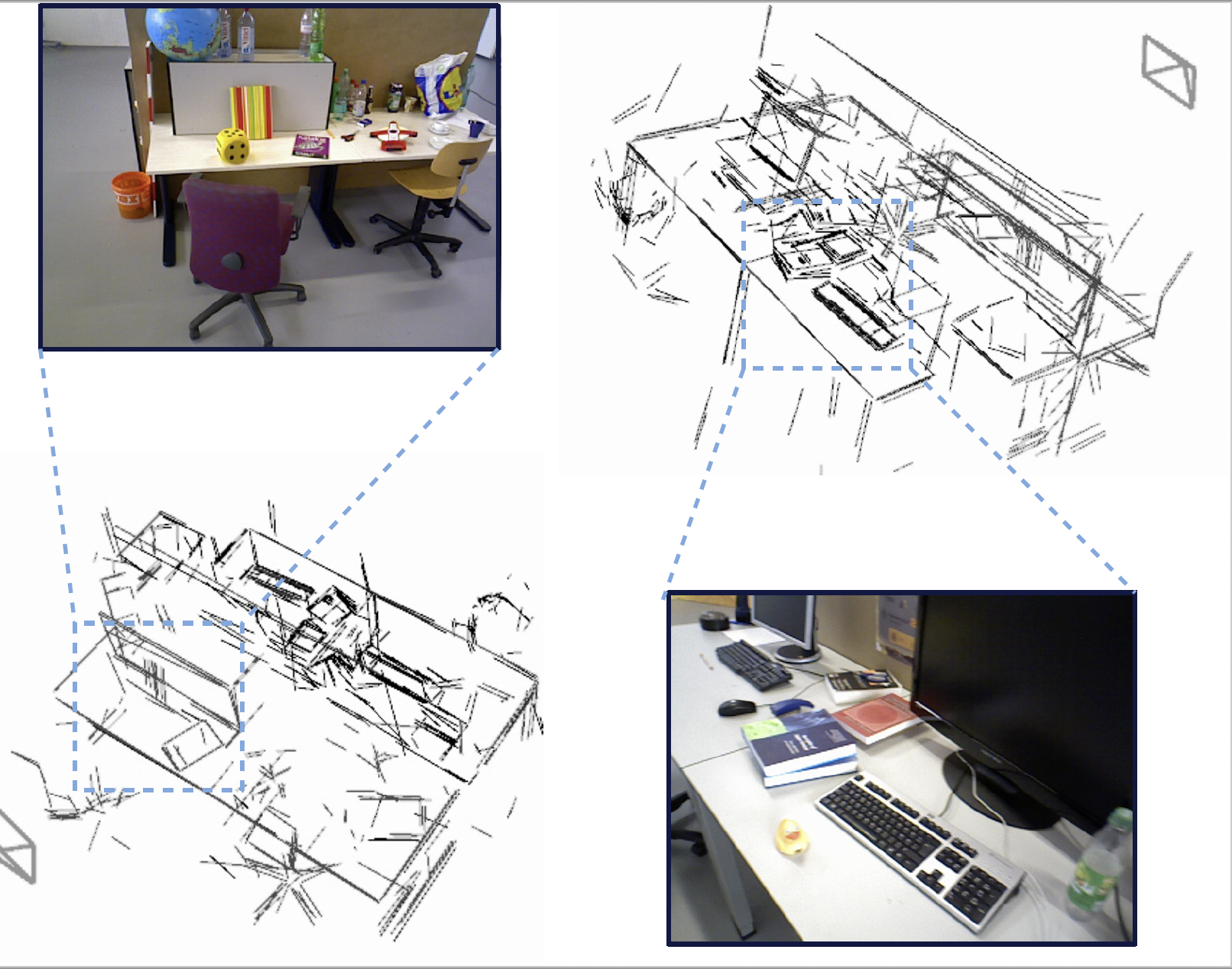
fr3_long_office (dataset TUM RGB-D)
-
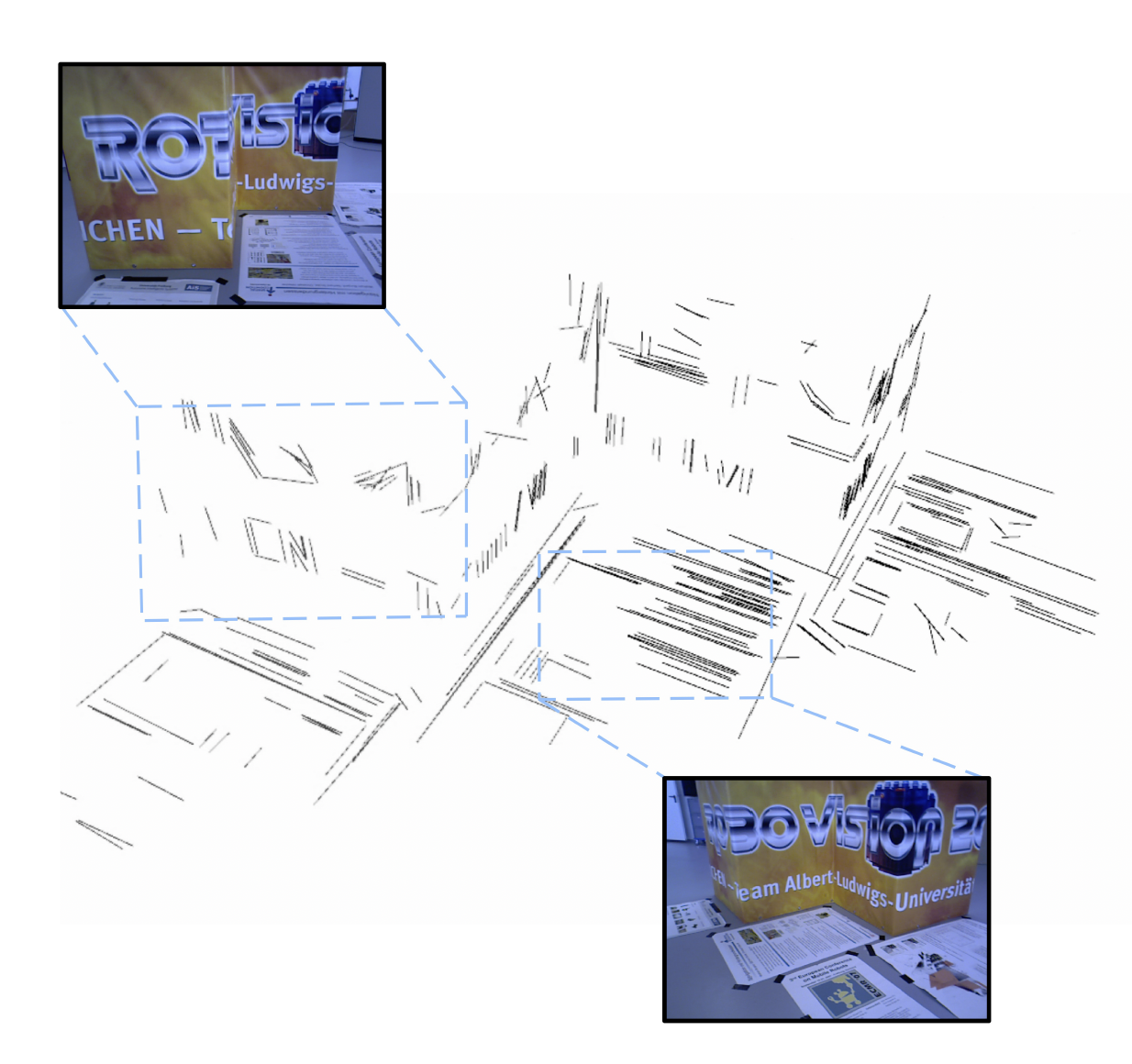
fr3_structure_texture_far (with out loop closure) (dataset TUM RGB-D)
-
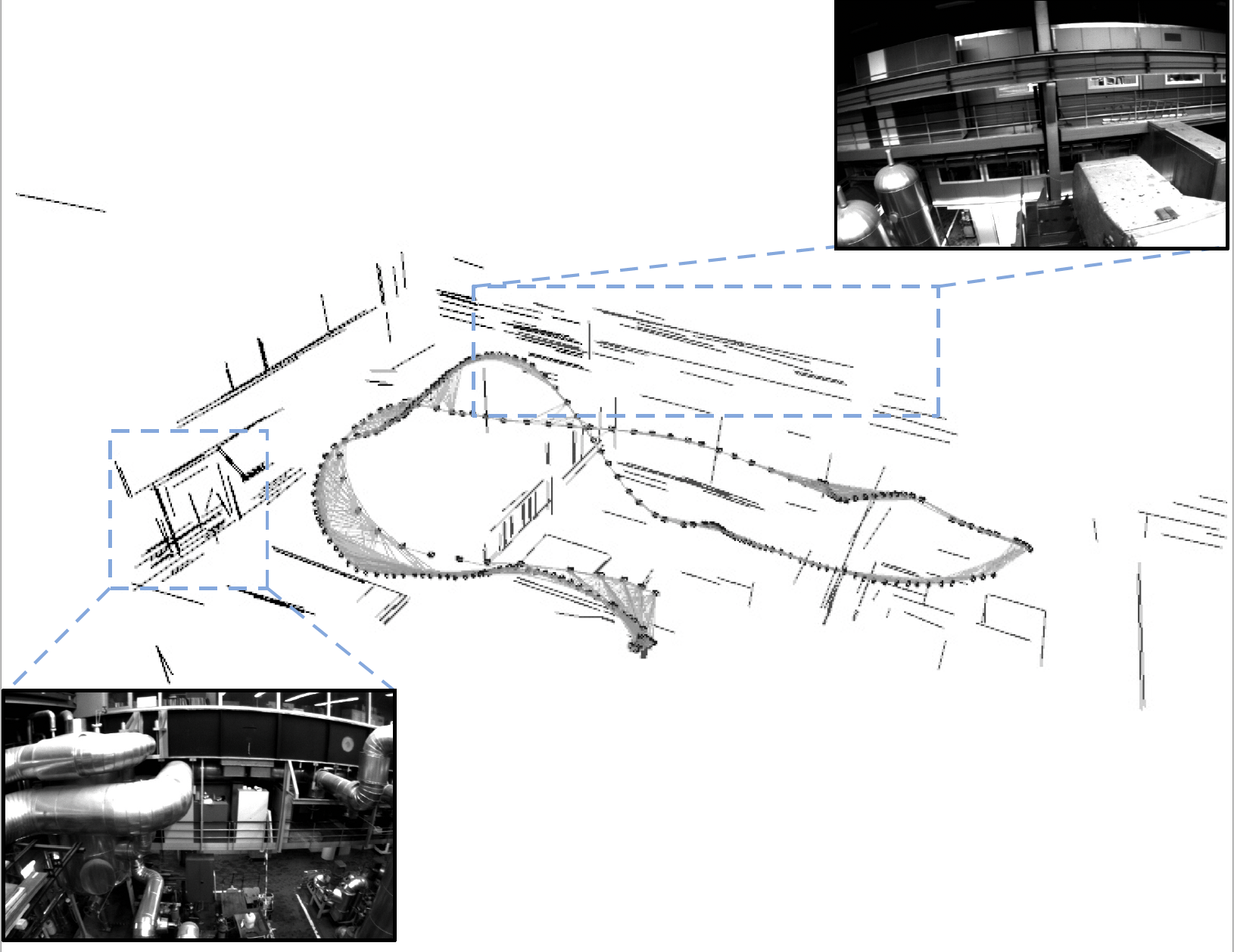
MH_04_difficult (dataset EuRoC MAV)
-
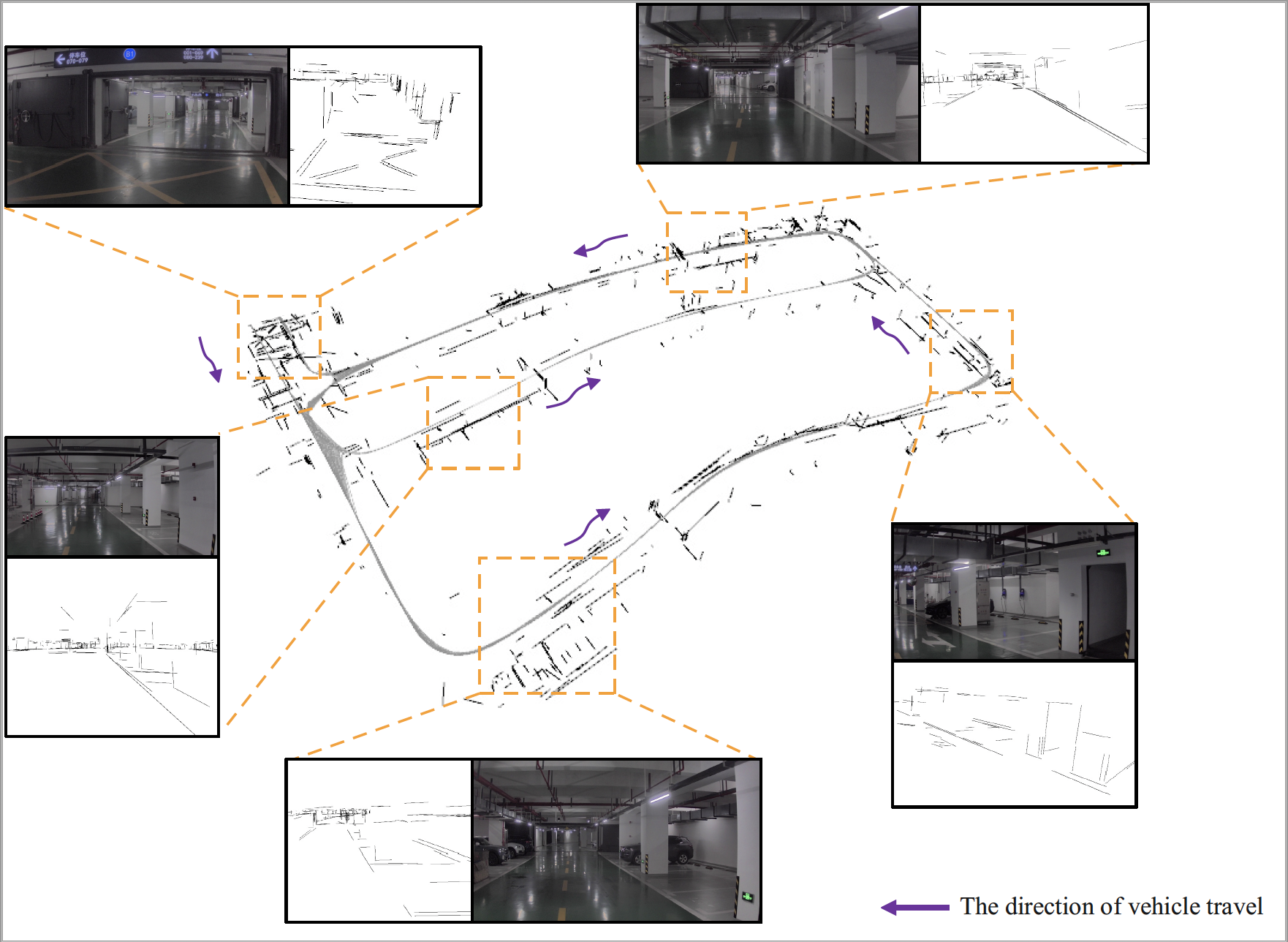
UG02 (data_odometry_gray, self-collected dataset)




We have tested the library in ubuntu 16.04 and ubuntu 18.04, other platforms may encounter compilation-related issues with the library (g2o/Pangolin). Most of the dependency issues can be resolved by referring to the configuration process in the ORB-SLAM3. A powerful computer (e.g. i7) will ensure real-time performance and provide more stable and accurate results.
We use the new thread and chrono functionalities of C++11.
We use Pangolin for visualization and user interface. Dowload and install instructions can be found at: https://github.com/stevenlovegrove/Pangolin.
We use OpenCV and corresponding OpenCV_Contrib to manipulate images and features. Dowload and install instructions can be found at: http://opencv.org. Tested with OpenCV 3.4.1
Required by g2o (see below). Download and install instructions can be found at: http://eigen.tuxfamily.org. Required at least 3.1.0.
We use modified versions of the DBoW2 library to perform place recognition and g2o library to perform non-linear optimizations. Both modified libraries (which are BSD) are included in the Thirdparty folder.
Required by OpenCV (see above), need to compile the source code. We use modified versions of the ELSED library. This will create libelsed.so at Thirdparty/ELSED/lib folder
Arpack++ is used here to address matrix operations related to our novel line matching algorithm. The github repository is https://github.com/m-reuter/arpackpp.
Compile the system. We provide a script build.sh to build the Thirdparty libraries and UL-SLAM. Please make sure you have installed all required dependencies. Execute:
chmod +x build.sh
./build.sh
TUM RGB-D dataset was recorded with the Kinect.
-
Download a sequence from https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download and uncompress it.
-
Associate RGB-D pairs based on associate.py provided by the dataset.
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
- Execute the following script to process all the sequences with all sensor configurations:
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM3.yaml PATH_TO_SEQUENCE_FOLDER .PATH_TO_SEQUENCE_FOLDER/ASSOCIATIONS_FILE
EuRoC dataset was recorded with two pinhole cameras and an inertial sensor. We provide an example script to launch EuRoC sequences in all the sensor configurations.
-
Download a sequence (ASL format) from http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
-
Open the script "euroc_examples.sh" in the root of the project. Change pathDatasetEuroc variable to point to the directory where the dataset has been uncompressed.
-
Execute the following script to process all the sequences with all sensor configurations:
./Examples/Monocular/mono_euroc Vocabulary/ORBvoc.txt Examples/Monocular/EoRoC.yaml PATH_TO_SEQUENCE_FOLDER
5.4. Evaluation with EVO tool (https://github.com/MichaelGrupp/evo)
evo_ape tum /data/TUM_RGBD/rgbd_dataset_freiburg3_structure_texture_far/groundtruth.txt ./keyframe_trajectory.txt -p --plot_mode=xy -a --verbose -s
Important flags:
--align or -a = SE(3) Umeyama alignment (rotation, translation)
--align --correct_scale or -as = Sim(3) Umeyama alignment (rotation, translation, scale)
--correct_scale or -s = scale alignment
If you use UL-SLAM in your research work, please cite:
@ARTICLE{jiang2024ul,
author={Jiang, Haochen and Qian, Rui and Du, Liang and Pu, Jian and Feng, Jianfeng},
journal={IEEE Transactions on Automation Science and Engineering},
title={UL-SLAM: A Universal Monocular Line-Based SLAM via Unifying Structural and Non-Structural Constraints},
year={2024},
volume={},
number={},
pages={1-18},
doi={10.1109/TASE.2024.3382770}}
Contact Haochen Jiang and Rui Qian for questions, comments and reporting bugs.