Testing a 4 DOF robotic arm
This is a 4 DOF robotic arm from Keyesudio
It' power by 2 x 18650 batteries (not include in the kit)
- An arduino clone board
- Shield with:
- 12 servo like connectors
- PS2 Joystick connector (PS2 Joystick not included)
- HM-10 Bluetooth module
- 4 x servo 9g with metal gears
- Arm metalic structure
- 2 x analog joystick controller
Pinout
| Name | IO Pin |
|---|---|
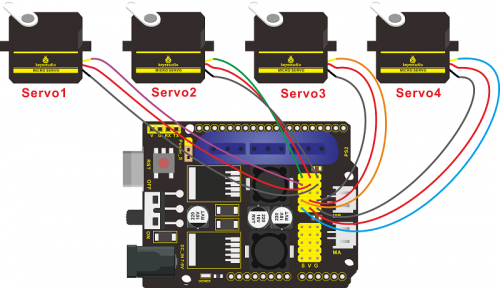
| Servo 1 (baseplate) | A1 |
| Servo 2 (left side) | A0 |
| Servo 3(right side) | 8 |
| Servo 4(clamp claw) | 9 |
| Right Joystick X | A2 |
| Right Joystick Y | A5 |
| Right Joystick Z (key) | 7 |
| Left Joystick X | A3 |
| Left Joystick Y | A4 |
| Left Joystick Z (key) | 6 |
| D1/DAT of PS2 | 12 |
| D0/CMD of PS2 | 10 |
| CE/SEL of PS2 | 11 |
| CLK of PS2 | 13 |
Servo movements
| Name | 0° | 180° |
|---|---|---|
| Servo 1(baseplate) | Rotate toward the rightmost | Rotate toward the leftmost |
| Servo 2(right side) | Rocker arm connected to Servo 2 stretches out | draw back |
| Servo 3(left side) | Rocker arm connected to Servo 3 draws back | stretches out |
| Servo 4(clamp claw) | closed | opened |
Electric connections
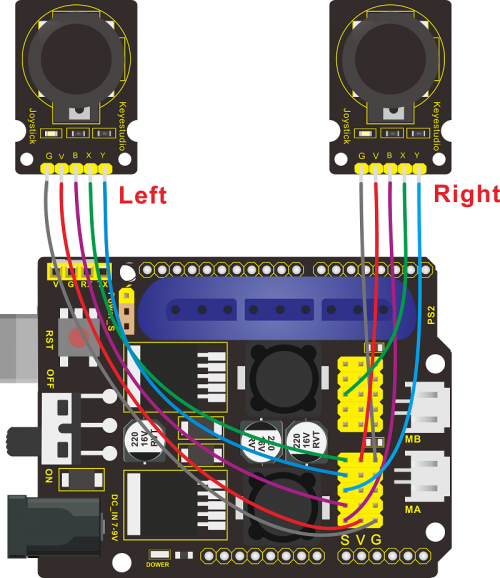
You can control the arm using:
- 2 x analog joysticks
- ps2 joystick
- app via bluetooth
Code
Test: control arm with analog joysticks
Pictures

