Code background: https://github.com/LdB-ECM/Docs_and_Images/tree/master/Documentation/Code_Background.md
There are no make files for the repo's as I am a commercial embedded developer and I use Windows and Visual Studio as my IDE. So I am cross compiling to the PI which comes out thru a commercial toolchain. Rather than waste time with rather complex make files I provide a batch file which contains the compile and link commands as they need to be executed. The path to the compiler executables will need to be changed if you want to use them. My path will look like "g:\pi\gcc_pi_6_3\bin\arm-none-eabi-gcc" and "g:\pi\gcc_pi_6_3\bin\arm-none-eabi-objcopy" you will need to change it to the path of arm-none-eabi-gcc.exe and arm-none-eabi-objcopy.exe on your system. The files usually have only 2 active lines and easy enough to convert to bash scripts for linux users. I am slowly providing basic bash scripts in the directory bash_scripts on each sample for copying into the main directory if needed.
32 Bit Cross Compiler Toolchain I use (Multiple O/S are supported):
https://developer.arm.com/open-source/gnu-toolchain/gnu-rm/downloads
32 Bit compile on the Pi itself with GCC 6:
https://github.com/LdB-ECM/Docs_and_Images/tree/master/Documentation/GCC6_On_Pi.md
64 Bit Cross Compiler Toolchain I use (Multiple O/S are supported):
https://releases.linaro.org/components/toolchain/binaries/latest/aarch64-elf/
64 Bit compile on the Pi itself:
TBD: Still trying to work out a toolchain install
AARCH64 Alpha: https://github.com/LdB-ECM/Raspberry-Pi/tree/master/Arm32_64_USB
Complete redux of CSUD (Chadderz's Simple USB Driver) by Alex Chadwick. All the memory allocation is gone and compacted to a single file (usb.c). It provides the Control channel functionality for a USB which enables enumeration. The HID support is very very basic and operates in the control channel. Later versions will add the full channels and full HID implementation. It works on Pi1, Pi2 & Pi3. If you want to just see what it does format an SD card and place the files in the diskimg directory onto it, place in Pi and turn power on. All being equal you should see something like this.

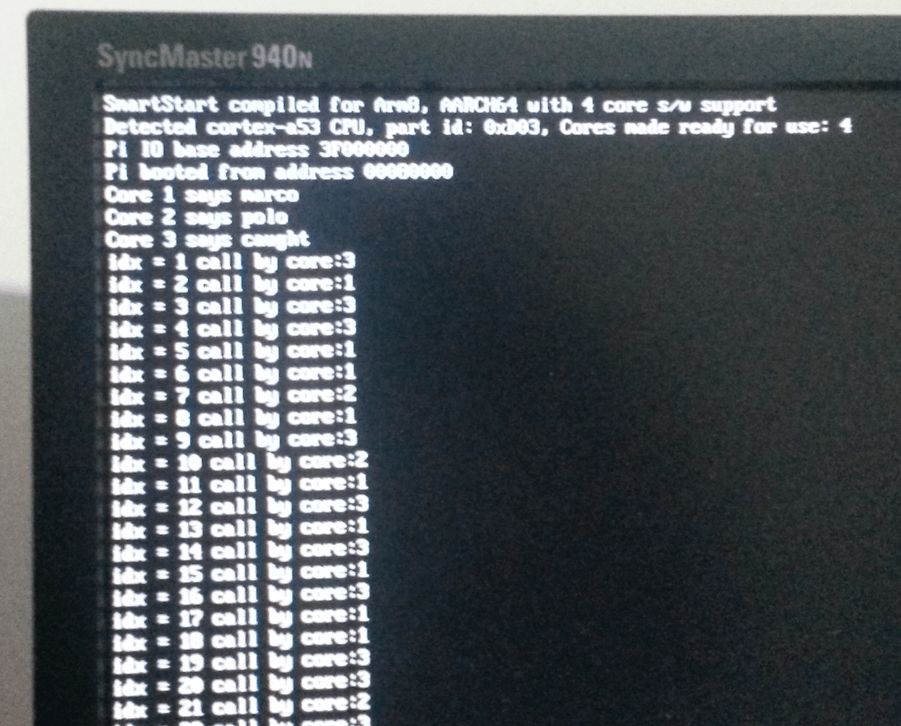
https://github.com/LdB-ECM/Raspberry-Pi/tree/master/Multicore
Please remember the Pi1 is single processor. So while you can build code for a Pi1 it can't be used for hyperthreading unless used on a Pi2 or Pi3. The fact you can run your Pi1 code on a Pi2/3 will only work because the SmartStartxx.s stub sorts all that out, just remember its ARM6 code and slightly slower. The assembler and linker files are paired you use either the 32 bit or 64 bit together.
The SmartStartxx.S assembler boot stub was extended to setup cores 1,2,3 for hyperthreading. A new spinlock was created which mimics the bootloaders but is C compiler safe. To do that registers that would be trashed by C routines where restored when the core process is called. In addition to that each core has its own stack the size of which is controlled by the new matching linker file (rpixx.ld).
As per usual you can simply copy the files in the DiskImg directory onto a formatted SD card and place in Pi to test
Yes it's the boring old interrupt timer and blinking LED this time in either 32Bit or 64Bit mode. For 64bit the technical background is the Pi3 is given to us in EL2 state. The timer interrupt is routed to EL1 where the interrupt service is established. It is obviously the first steps in how to route interrupt signals to services on the Pi3 in 64bit mode.
This will be my ongoing work to try to build a baremetal GLES interface of some kind. Having gone thru the firmware blob via a VCOS shim this time I am going to try going direct onto the VC4. The reason for the new attempt is the GL pipleine details are finally being really exposed by Eric AnHolt in his work on the OpenGL and his current work on the VC5 successor from Broadcom.
I have not yet settled on an interface format but more going to try to follow a tutorial series on OpenGL 3.3 and develop a baremetal interface as I go.
Tutorial series currently at number 3: http://www.mbsoftworks.sk/index.php?page=tutorials&series=1

https://github.com/LdB-ECM/Raspberry-Pi/tree/master/GLES2_Model
Note: No 64Bit version at the moment as there are issues with C standard string unit I need to look at.
So we continue our GL pipe adventure slowly crawling towards something that ressemblesminimal OpenGL.
So we work on rotating an actual LightWave OBJ 3D mesh model:

Streaming video of output:
As per usual you can simply copy the files in the DiskImg directory onto a formatted SD card and place in Pi to test
https://github.com/LdB-ECM/Raspberry-Pi/tree/master/SD_FAT32
To take my accelerated graphics further I found I was in need of the ability to Read Files from the SD Card. I reworked some old code I had done for an article, simplifying it to something that meets the requirements. At this stage the code is strictly READ file only and the API calls mimic the standard file functions from the Windows API.
As per usual you can simply copy the files in the DiskImg directory onto a formatted SD card (make sure this includes the subdirectory "Bitmaps") and place in Pi to test
