O projeto utiliza um sensor ultrassônico para detectar a proximidade de um objeto, como um carro, e aciona sinais visuais e sonoros para indicar a distância.
A distância mínima para acionar o alerta está configurada em 10 centímetros. Essa distância pode ser ajustada conforme necessário, modificando a constante distancia_carro no início do código.
const int distancia_carro = 10;As portas do Arduino estão configuradas da seguinte maneira:
-
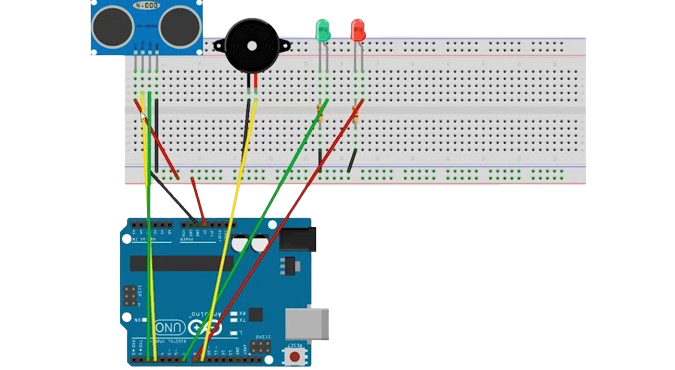
Sensor Ultrassônico:
- TRIG (Trigger): Pino 3
- ECHO (Echo): Pino 2
-
LEDs:
- ledGreen: Pino 7
- ledRed: Pino 8
-
Buzzer:
- buzzer: Pino 9
O código no loop principal realiza as seguintes operações:
-
Leitura da Distância:
- Utiliza a função
sensor_morcegopara obter a distância em centímetros entre o sensor ultrassônico e o objeto.
- Utiliza a função
-
Avaliação da Distância:
- Se a distância for menor ou igual à distância configurada (
distancia_carro), indica um alerta de proximidade. - Caso contrário, indica que o espaço está livre.
- Se a distância for menor ou igual à distância configurada (
-
Sinalização Visual e Sonora:
- Aciona LEDs e um buzzer conforme a situação.
int sensor_morcego(int pinotrig, int pinoecho);Esta função utiliza o sensor ultrassônico para medir a distância. Ela recebe os pinos TRIG e ECHO como parâmetros e retorna a distância em centímetros.
void tocaBuzzer();Esta função é responsável por gerar um som de alerta quando a distância mínima é detectada. Ela utiliza a função tone do Arduino para gerar um som modulado.
O programa também fornece informações úteis por meio da comunicação serial, como a distância atual medida pelo sensor.
Serial.begin(9600);A comunicação serial está configurada para uma velocidade de 9600 bps. Isso pode ser ajustado conforme necessário.
| C++