Solving cheetah,cartpole,reacher,walker Deepmind Control Suite using DDPG
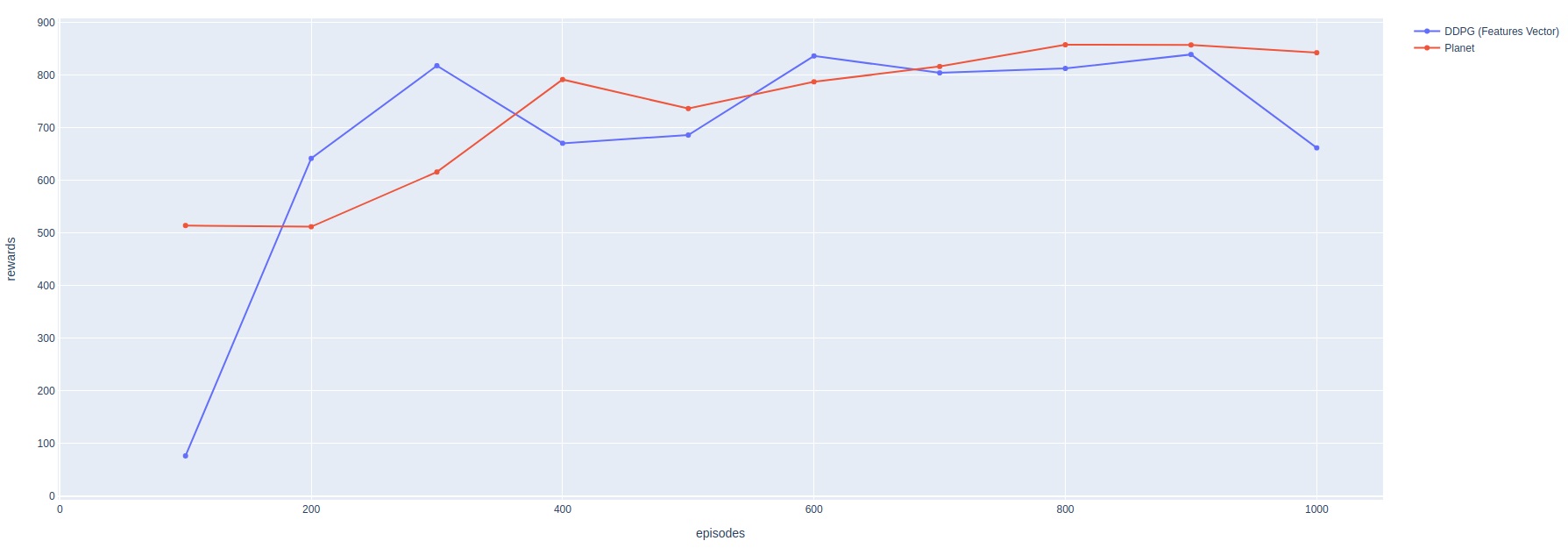
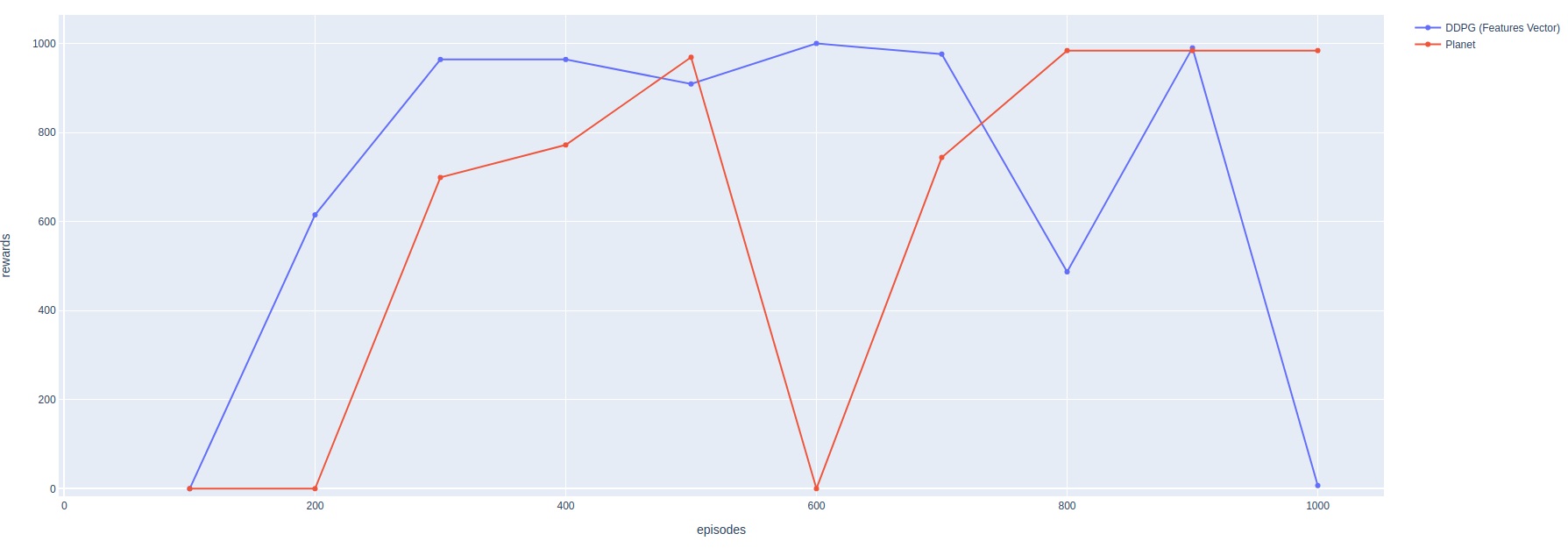
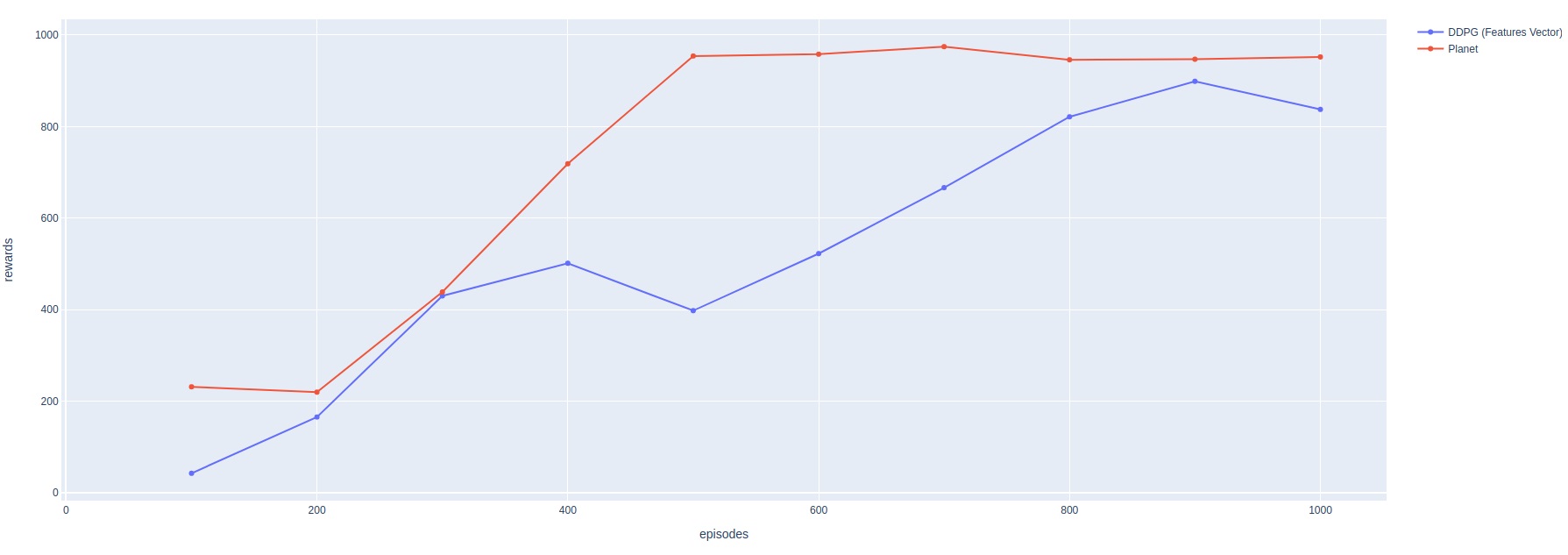
This repo is from my Master's degree thesis work. I used PlaNet to prove that model-based DRL can overcome the model-free algorithms in terms of sample efficiency. I extended the MoritzTaylor implementation to make it compatible with the Deepmind Control Suite.
To have more details on the full work, visit blog article.

My work with PlaNet MoritzTaylor implementation OpenAi implementation