This project aims to count every vehicle (bus, car, truck) detected in the input video using YOLOv5 object-detection algorithm. It also calculates speed, acceleration of every vehicle

-
Clone this repository
git clone https://github.com/Garvit-32/UAV.git -
Install all the dependencies
pip install -r requirements.txt -
Collect 6-8 coordinates points (latitude, longitude) from google maps and (x, y) from the image and put it in Code/localization/localization_from_points.py from there you get the pixel delta (delta x, delta y) which is used to calculate distance, speed and acceleration of vehicle later.
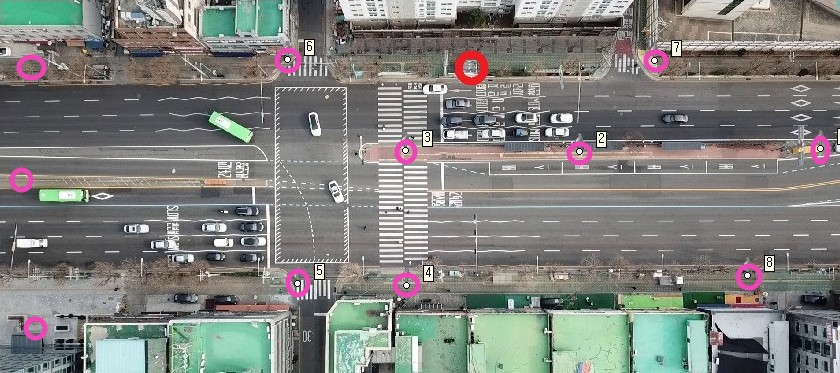
In the given script, 8 points of this image are given, likewise you have to collect and put.
-
Exceute main script to start tracking
python Code/main.py -p <path to video> -o <latitude and longitude coordinate of the center of the frame > -pd < pixel delta calculated from localization script>Example
python Code/main.py -p Input/DJI_0004_gt.mp4 -o "37.47646052, 126.89894" -pd "-2.00e-06, -2.00e-06" -
Evaluate Tracking (GroudTruth are required)
python Code/tracking_eval/tracking_eval.py -p <Path to folder containing groundtruth> -v <video name>Example
python Code/tracking_eval/tracking_eval.py -p Input/yolo_id -v DJI_0004_gtTracking result for the given video are:
MOTA 0.7994 MOTP 0.7660 Ground Truths 3884 False Positives 757 Misses 10 Mismatches 12 Correspondences 3874
