Computer Vision Course Exercises at Amirkabir University of Technology - Fall 2022
By Gholamreza Dar
- Table of Contents
- Exercise 1 [Image Manipulations, Canny Edge Detection, Histogram Equalization]
- Exercise 2 [Road Lane Detection, Crack Segmentation using Active Contours]
- Exercise 3 [Thresholding, Template Matching]
- Exercise 4 [Image Segmentation using K-Means, GLCM, FilterBanks]
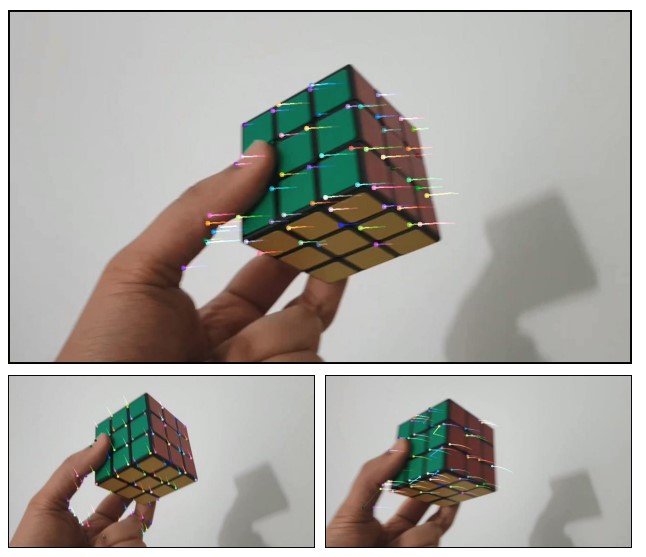
- Exercise 5 [Feature Matching using SIFT and FREAK]
- Exercise 6 [Object Detection using R-CNN on Counter Strike Dataset]
- Exercise 7 [3D Vision, LiDAR data, Stereo Matching, 3D Scene Reconstruction, Depth Maps]
- Exercise 8 [Corner Detection, Optical FLow using Lukas-Kanade and Gunnar-Farneback]
- Fundamental image manipulations
- Extract colors using HSV colorspace and
inRange()function - Align and Combine misaligned channels

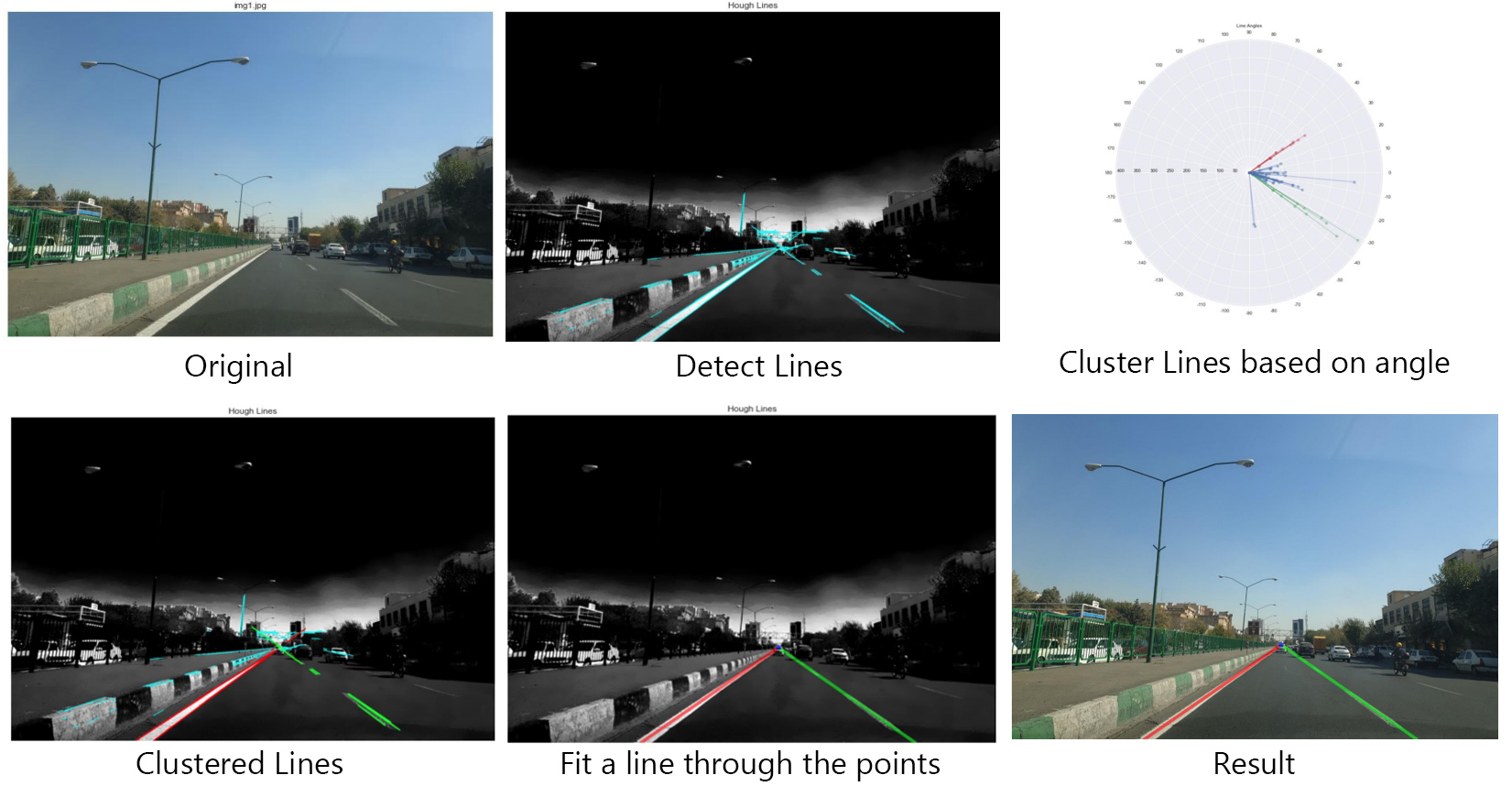
- Road Lane Detection
- Detect road lanes using Canny, Hough, Clustering lines by angle, and Linear regression
- Road Lane Detection on video
- Added smoothing features to maintain the lanes over time (Some frames were very blurry or foggy, but we could assume that the car doesn't suddenly change directions).
video
video
- Crack Segmentation using Active Contours

- Implement Otsu Thresholding
- Implement Iterative Thresholding
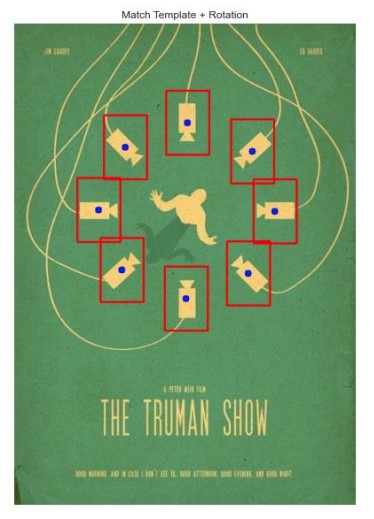
- Match Template Exercise
- Detect the template in various orientations by rotating the template each time.
- Colored-Image Segmentation by Clustering

- Image Segmentation using GLCM

- Image Segmentation using Filter Banks


- Feature Matching using SIFT
- Recover a rotated Image using feature matching

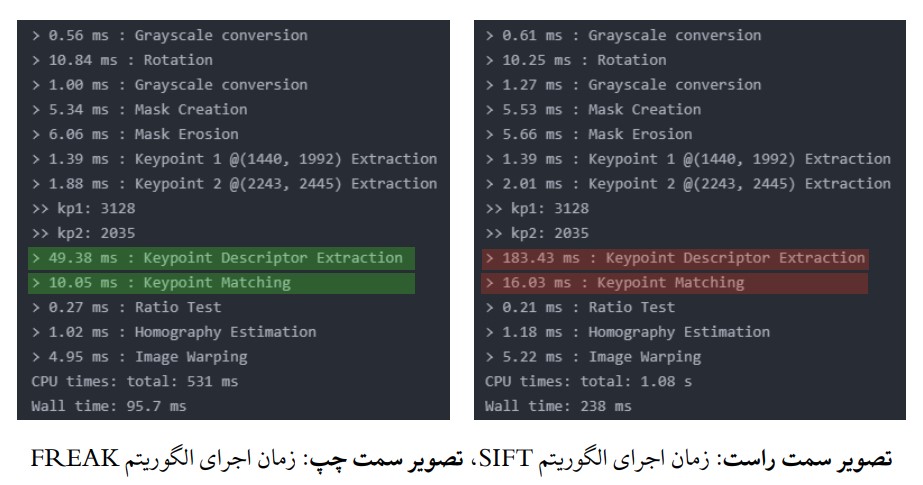
- Compare SIFT and FREAK
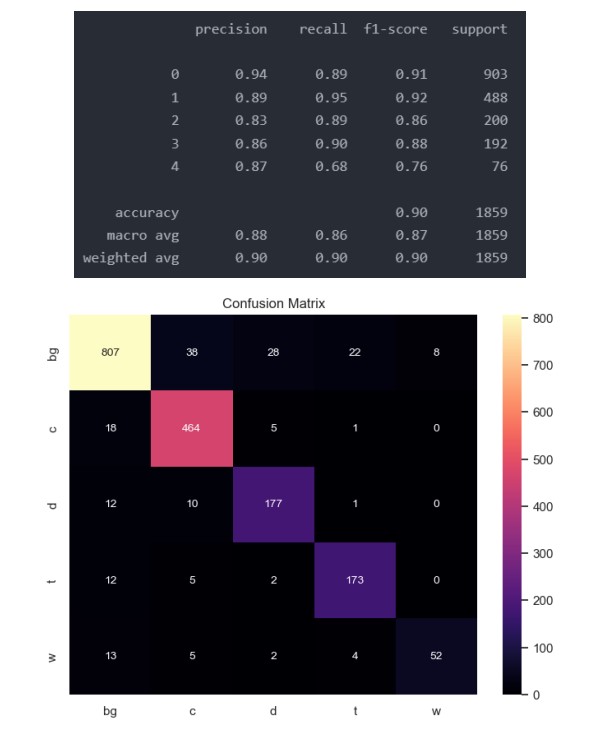
- Object Detection on the Counter-Strike dataset (R-CNN method)
- Classes are: W(eapon), T(errorist), C(ounter terrorist), D(ead), bg
- using mean (average) of a patch as the feature and KNN as classifier
- using LBP (Local Binary Pattern) of a patch as the feature and KNN as classifier

- using Neural Network (EfficientNetb0) as the feature extractor and classifier

- Some of the results (Can definitely be improved but due to the end-of-semester time limits didn't try to improve it).

- 3D Vision
- Plotting LiDAR data on the image using the camera parameters

* Using LiDAR data to estimate the depth map

* Using Linear Interpolation to overcome the sparsity of LiDAR data

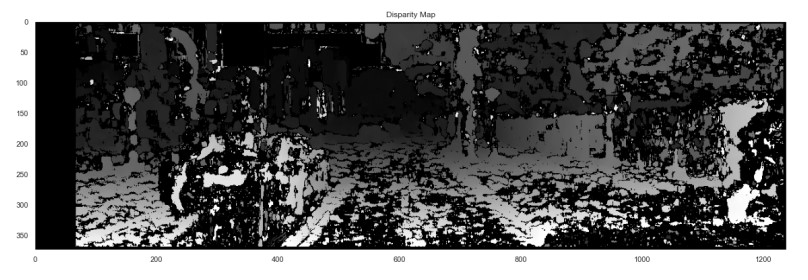
* Using stereo matching to estimate the depth map
* 3D reconstruction of the scene using the estimated depth map

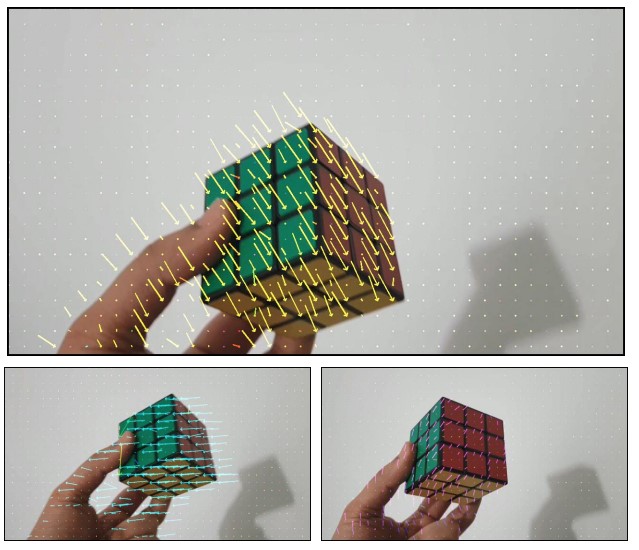
- Detect Corners using Shi-Tomas Algorithm

- Optical Flow using the Lukas-Kanade Algorithm
- Dense Optical Flow using the Gunnar-Farneback Algorithm