Current version: 1.1.0
(the following is generated from the crate's rustdoc. reading it on docs.rs will probably be a better experience)
This is an implementation of Eric Lengyel's Transvoxel Algorithm in Rust
Credits: Eric Lengyel's Transvoxel Algorithm. https://transvoxel.org/
When extracting meshes with Marching Cubes for adjacent blocks at different level of detail independently, the meshes generally do not match at the blocks' junctions, inducing visible holes:
Eric Lengyel's website describes this better and in more details.
This library only provides functions for extracting a mesh for a block, independently of other blocks. To implement a fully consistent dynamic level-of-detail system, you will also probably need to:
- decide which blocks you need to render and generate meshes for, and at which resolution (typically depending on the camera position and/or orientation)
- track yourself constraints:
- two rendered adjacent blocks can only either have the same resolution, or one have double the resolution of the other
- in that second case, the low resolution block must also be rendered with a transition face in the direction of the high resolution block Currently, it is not possible to "flip" a transition face status on a block, without re-extracting a new mesh for the block. Which means changing the resolution for one block can cascade through constraints to re-generating a few other blocks as well
- complete rework of the interfaces. Notably: you can now implement a MeshBuilder yourself
- removal of the
bevy_meshfeature: There is code in our examples with various mesh builders for bevy
Either try calling one of the functions in [extraction], or follow the example below:
// The first thing you need is a density provider. You can implement a DataField for that
// but a simpler way, if you are just experimenting, is to use a function:
fn sphere_density(x: f32, y: f32, z: f32) -> f32 {
1f32 - (x * x + y * y + z * z).sqrt() / 5f32
}
// Going along with your density function, you need a threshold value for your density:
// This is the value for which the surface will be generated. You can typically choose 0.
// Values over the threshold are considered inside the volume, and values under the threshold
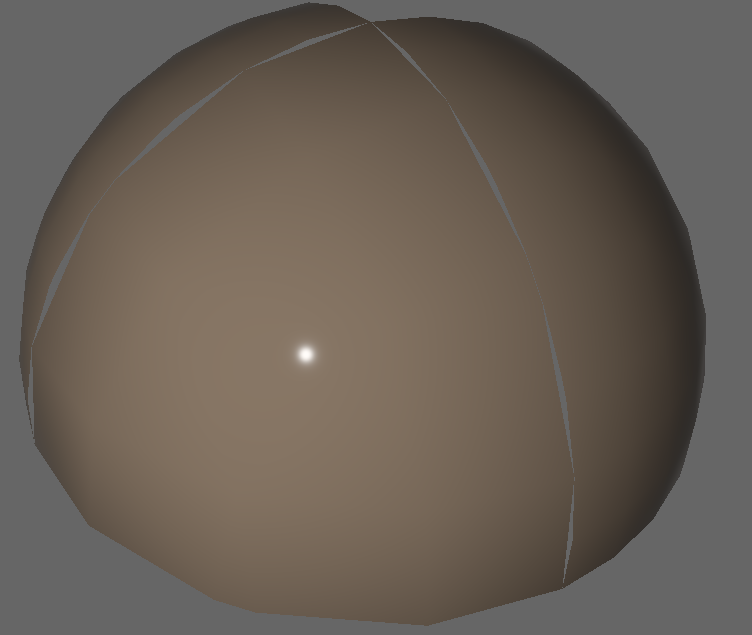
// outside of the volume. In our case, we will have a density of 0 on a sphere centered on the
// world center, of radius 5.
let threshold = 0f32;
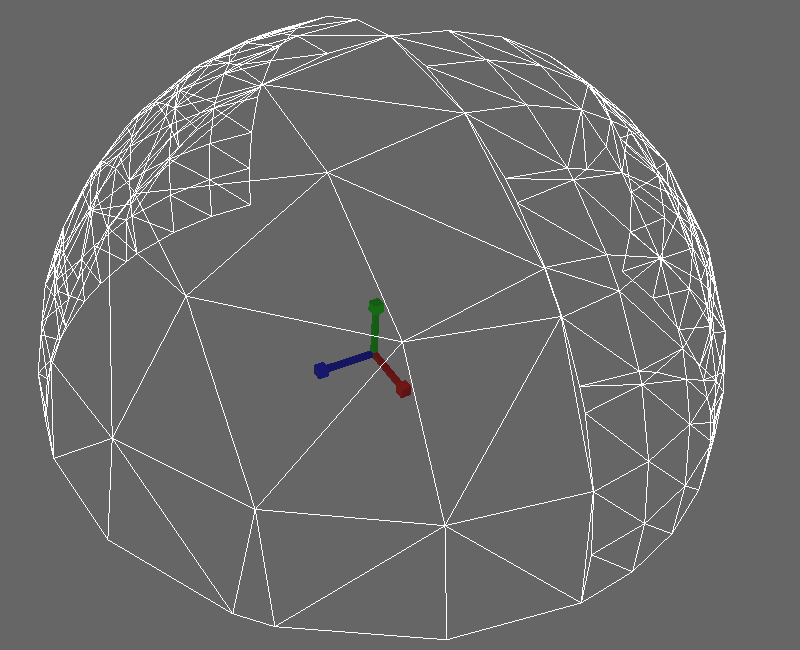
// Then you need to decide for which region of the world you want to generate the mesh, and how
// many subdivisions should be used (the "resolution"). You also need to tell which sides of the
// block need to be transition (double-resolution) faces. We use `no_side` here for simplicity,
// and will get just a regular Marching Cubes extraction, but the Transvoxel transitions can be
// obtained simply by providing some sides instead (that is shown a bit later):
use transvoxel::prelude::*;
let subdivisions = 10;
let block = Block::from([0.0, 0.0, 0.0], 10.0, subdivisions);
let transition_sides = transition_sides::no_side();
// Finally, you can run the mesh extraction:
use transvoxel::generic_mesh::GenericMeshBuilder;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, transition_sides, builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 103);
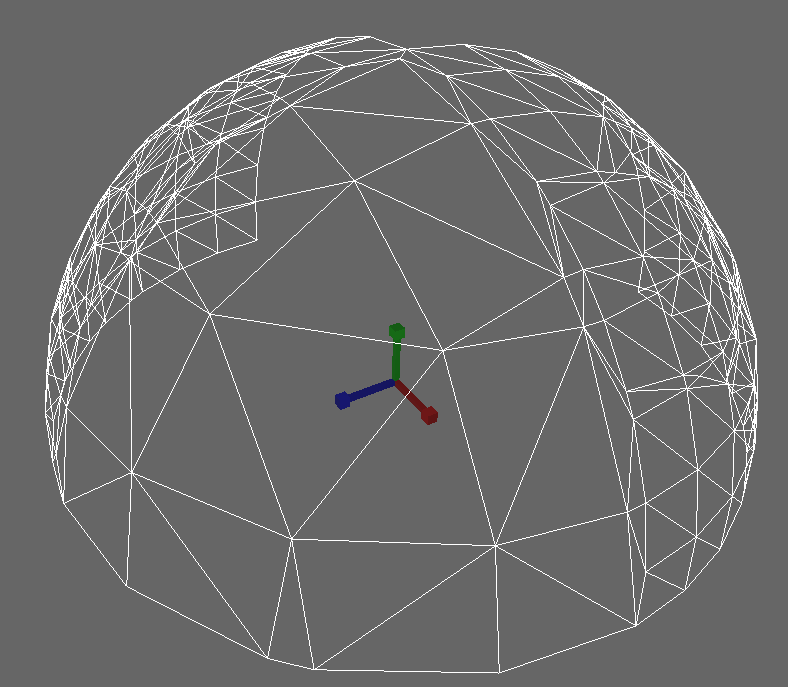
// Extracting with some transition faces results in a slightly more complex mesh:
use transition_sides::TransitionSide::LowX;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, LowX.into(), builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 131);
// Unless, of course, the surface does not cross that face:
use transvoxel::transition_sides::TransitionSide::HighZ;
let builder = GenericMeshBuilder::new();
let builder = extract_from_field(&sphere_density, &block, threshold, HighZ.into(), builder);
let mesh = builder.build();
assert!(mesh.tris().len() == 103);A mesh for a simple square looks like this:
Extracted mesh: Mesh {
positions: [
10.0,
5.0,
0.0,
0.0,
5.0,
0.0,
0.0,
5.0,
10.0,
10.0,
5.0,
10.0,
],
normals: [
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
-0.0,
1.0,
-0.0,
],
triangle_indices: [
0,
1,
2,
0,
2,
3,
],
}It is made of 4 vertices, arranged in 2 triangles. The first vertex is at position x=10.0, y=5.0, z=0.0 (the first 3 floats in position). As the first in the list, it's index is 0, and we can see it is used in the 2 triangles (the first triangle uses vertices 0 1 2, and the second triangle vertices 0 2 3)
use transvoxel::transition_sides::{TransitionSide, no_side};
// If you don't hardcode sides like in the example above, you can build a set of sides incrementally:
// They use the FlagSet crate
let mut sides = no_side();
sides |= TransitionSide::LowX;
sides |= TransitionSide::HighY;
assert!(sides.contains(TransitionSide::LowX));
assert!(!sides.contains(TransitionSide::HighX));- Provide a way to extract without normals, or with face normals, which would be much faster
- Output/Input positions/normals are only f32. It should be feasible easily to extend that to f64
- Voxel densities caching is sub-optimal: probably only in the case of an empty block will densities be queried only once per voxel. In non-empty blocks, densities are very likely to be queried several times for some voxels
- Algorithm improvements. See Algorithm
Licensed under either of
- Apache License, Version 2.0 (LICENSE-APACHE or http://www.apache.org/licenses/LICENSE-2.0)
- MIT license (LICENSE-MIT or http://opensource.org/licenses/MIT)
at your option.
Unless you explicitly state otherwise, any contribution intentionally submitted for inclusion in the work by you, as defined in the Apache-2.0 license, shall be dual licensed as above, without any additional terms or conditions.