Please download it from the google drive to test your own floorplan images.
-
Use DataFloorPlans500 to train the first object recognition model. Since the data is not fully suitable on our usecase. This model is just for labeling our own data. The following images show some fail cases of this model on our dataset (ROBIN). Yolov8 is used in this task.
- Table Recognized as Door:
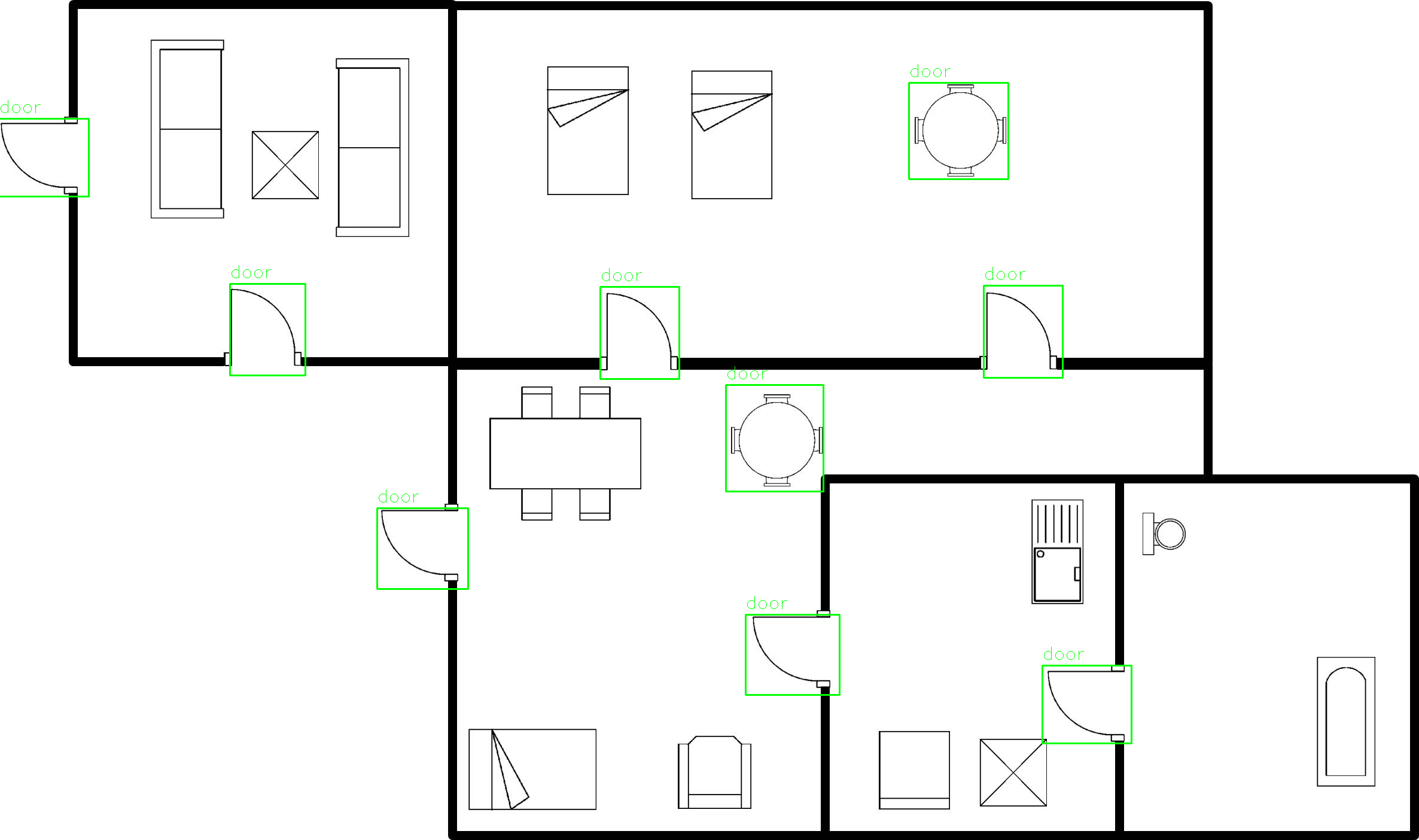
- Sink Recognized as Door:
- Door not Recognized:
- Table Recognized as Door:
-
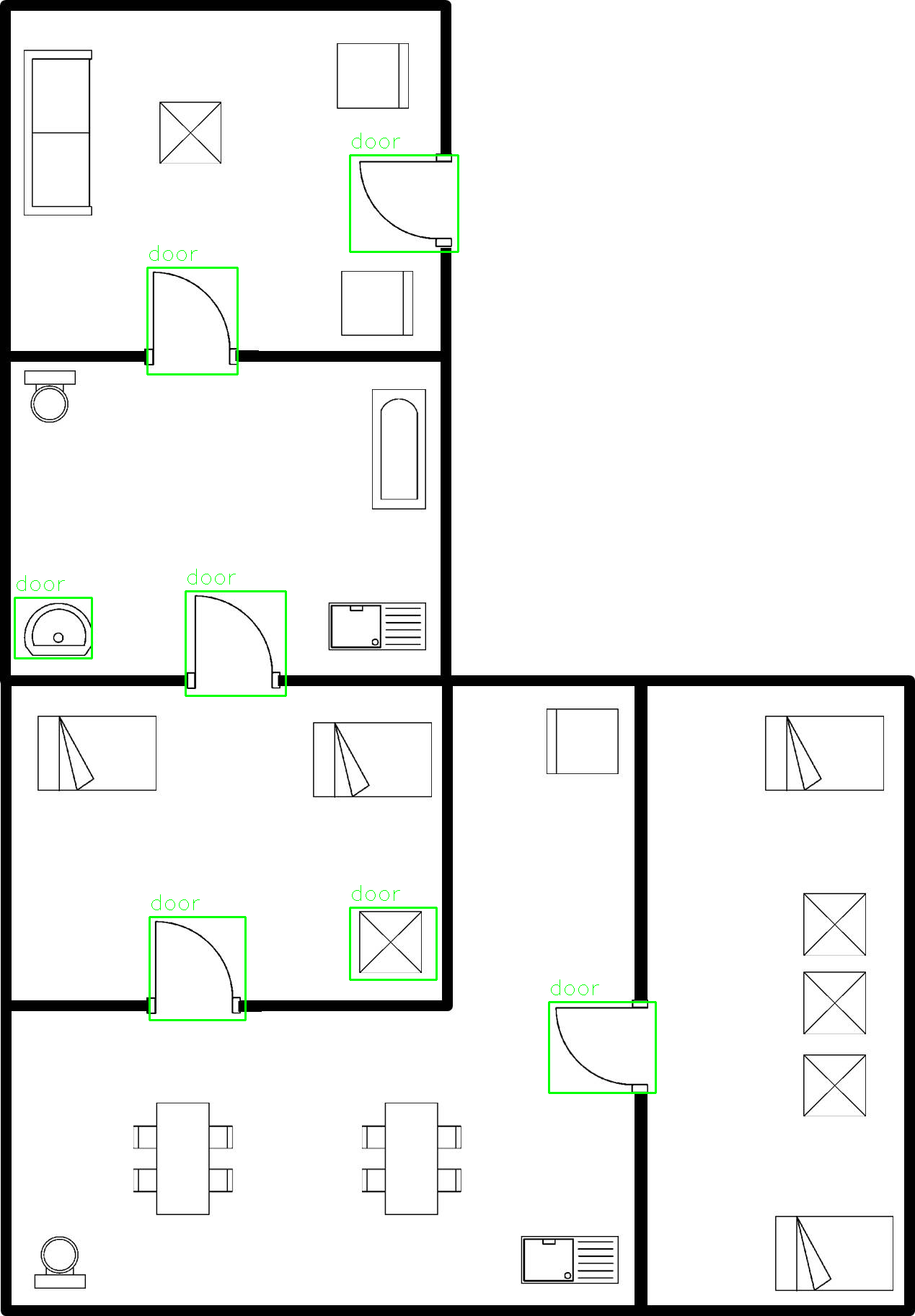
Use frist object detection model to do the labeling with some manual adjustment and train the second model based on our target dataset (ROBIN). The manual adjusted data is at google drive, which can be put on the
FloorPlan/ROBIN/ROBIN_Door_15_Labeled. The following images show the improvements of the 2nd model from the first model. Yolov8 is used in this task.- (Fixed) Table Recognized as Door:
- (Fixed) Sink Recognized as Door:
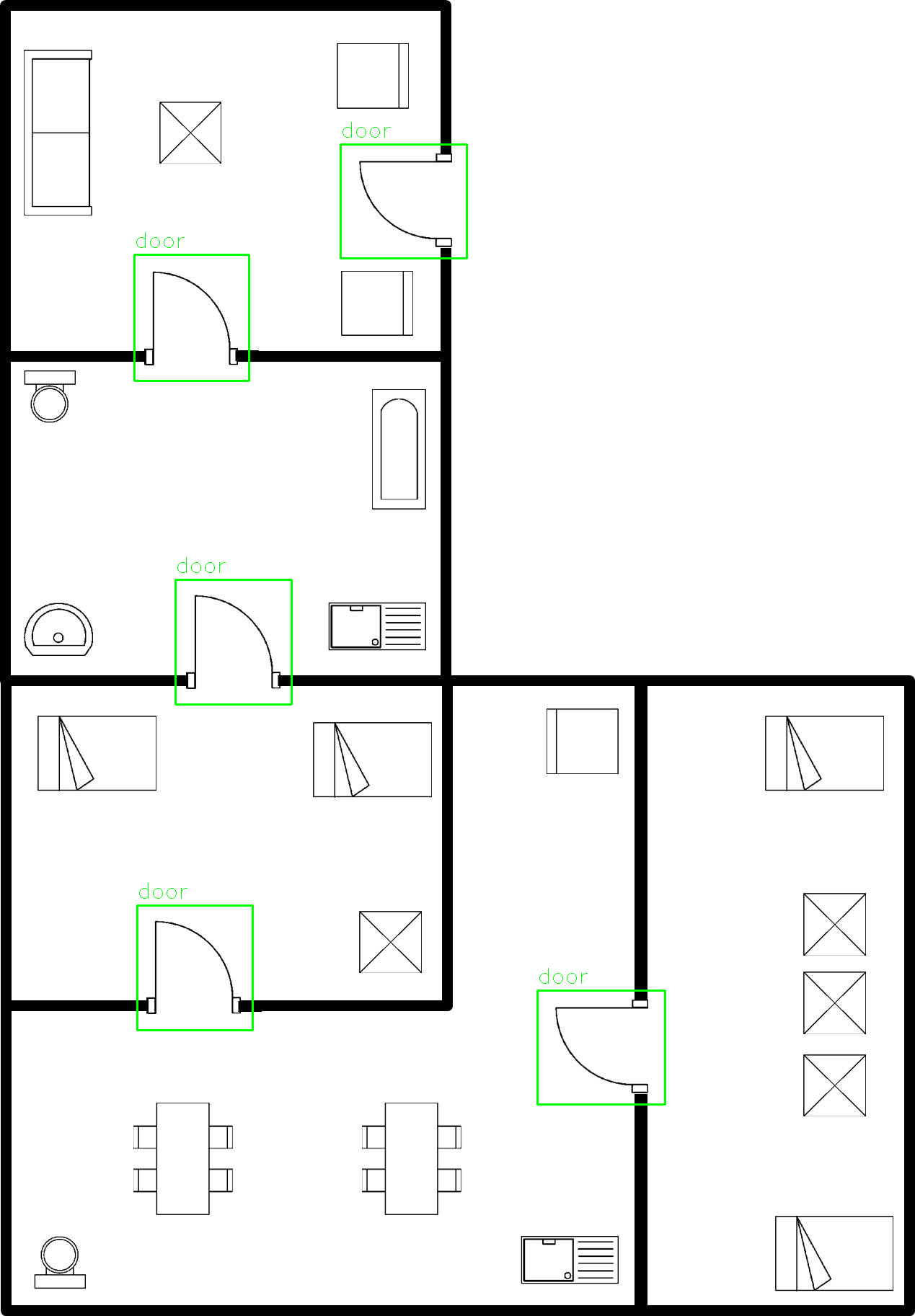
- (Fixed) Door not Recognized:
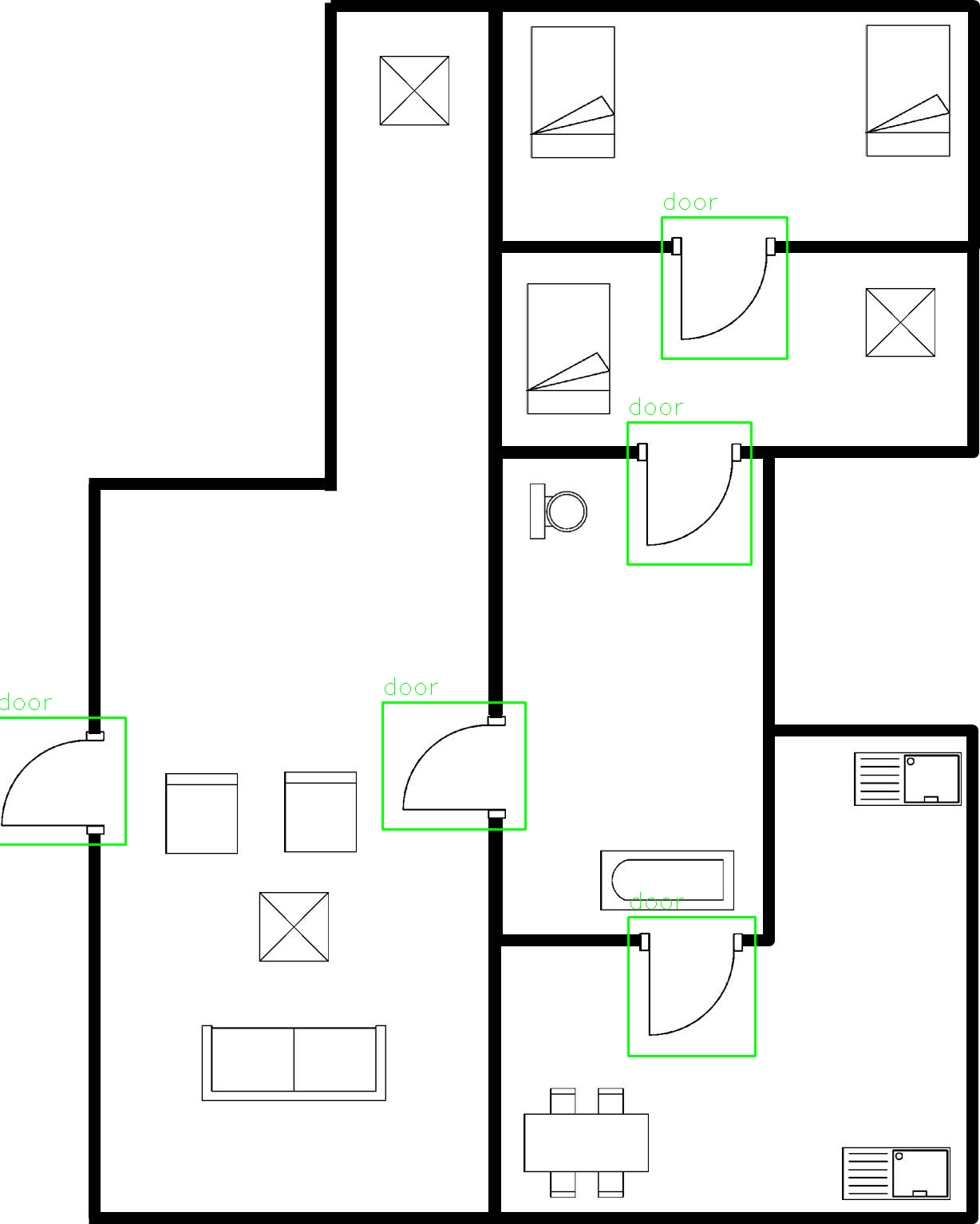
- (Fixed) Table Recognized as Door:
-
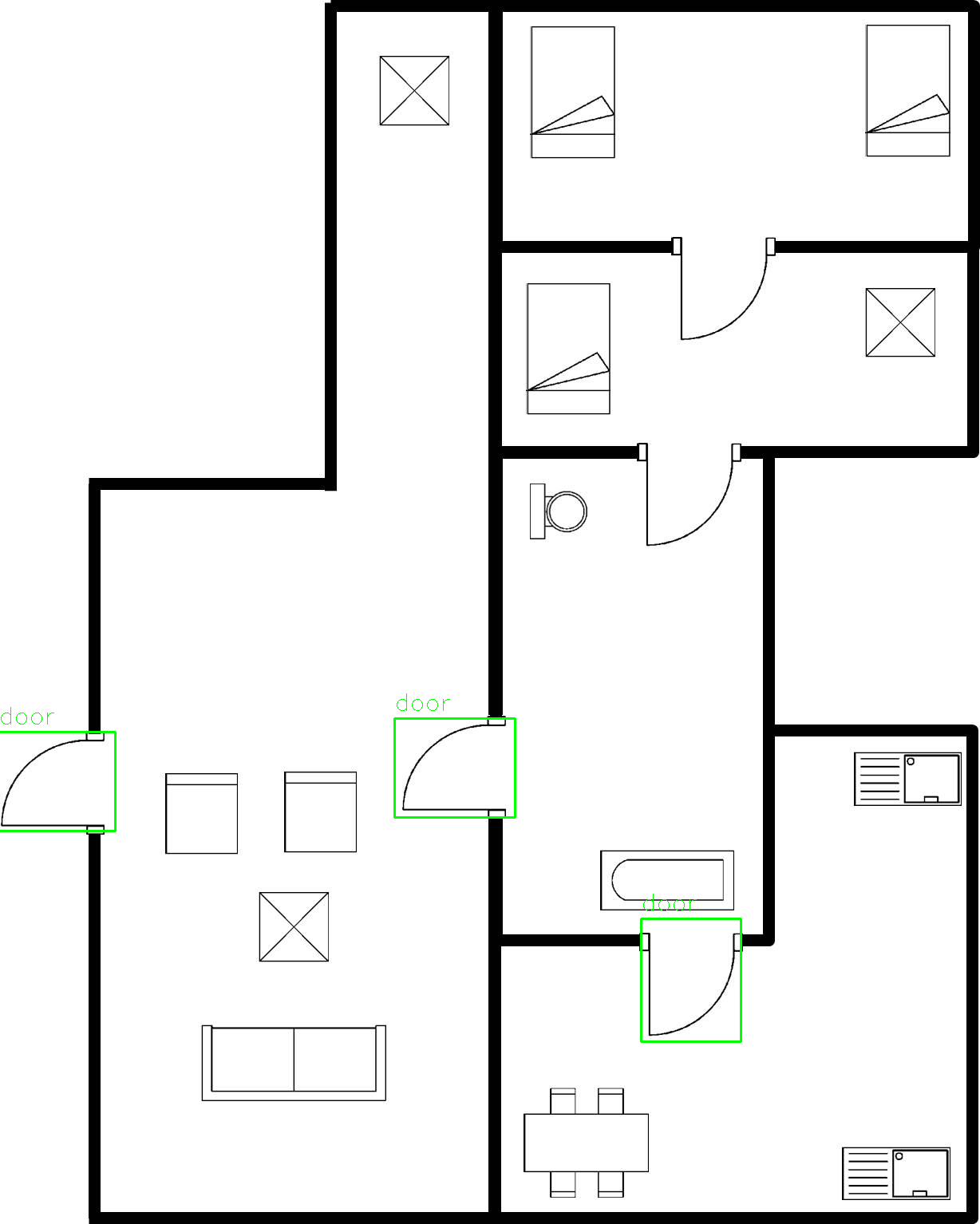
Use traditional CV methods to help annotation the location of doors. The following images show some success and fail annotation caes. After the CV methods annotation, some manual adjustments are required to ensure the correctness of the label, which will be furher used to train the segmentation model.
- Normal:
- Fail Case1 (Door Area Too Big):
- Fail Case2 (Door Area Too Big):
- Fail Case3 (Fail to Find Orientation):
- Fail Case4 (Fail to Find Orientation):
- Normal:
-
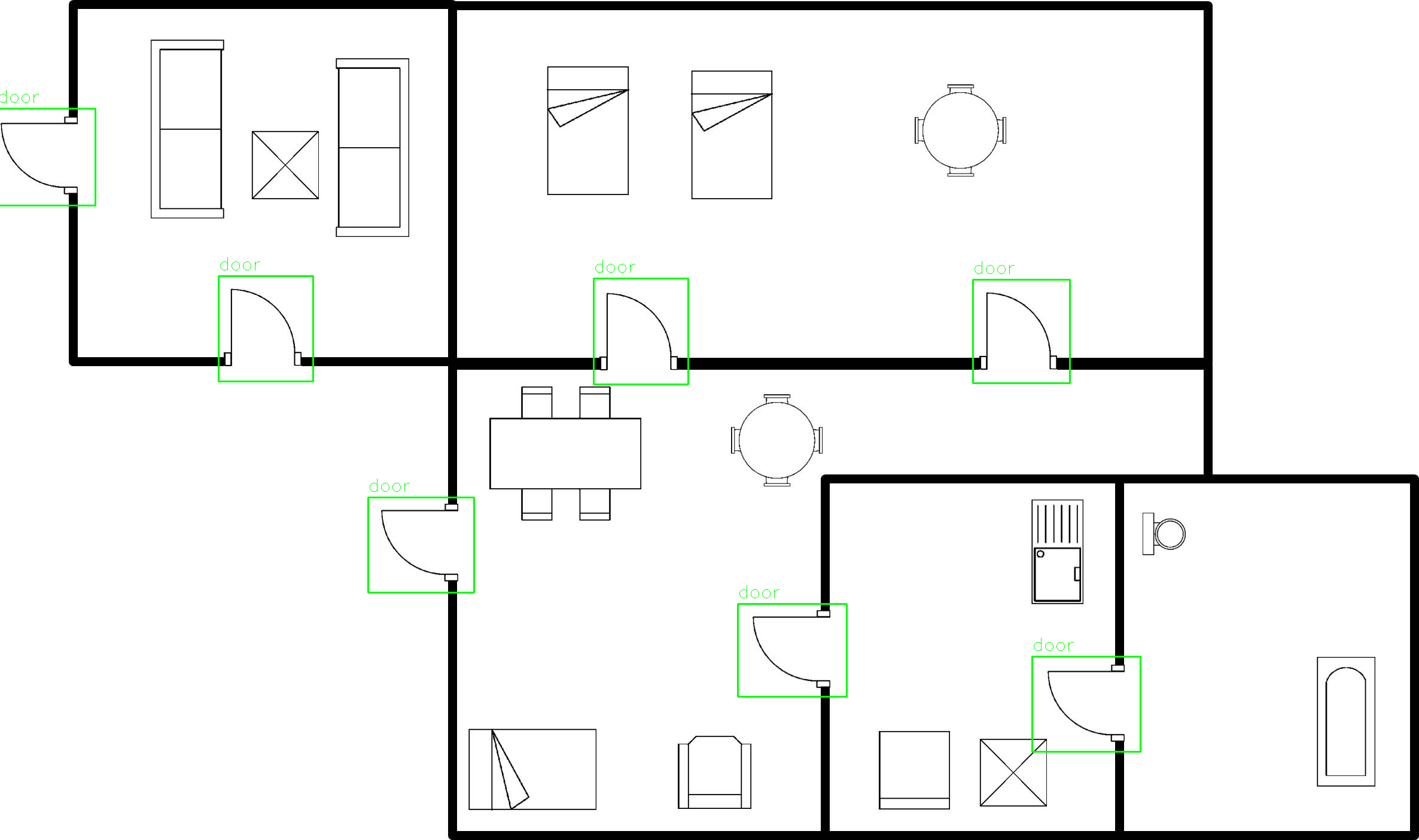
Train the segmentation model to recognize the orientation of the door. The labeled dataset can be found at google drive. The training code can be found in
FloorPlan/DoorOrientationSegmentation. The self-built UNet architecture as well as whole PyTorch training pipeline are used in this task. The following figures show the some processes in this training pipeline.- Labeled Data:
- Augmentation: This techniques are used to enhance the generalizability of the model.
- Model Prediction: The Red is the predicted location of the door. The blue is the labeled location of the door. Since they are almost overlapped, the blue lines are usually not visible.
- Labeled Data:
-
Locate Camera and Card Reader from the door location and its orientation.
- Prediction1:
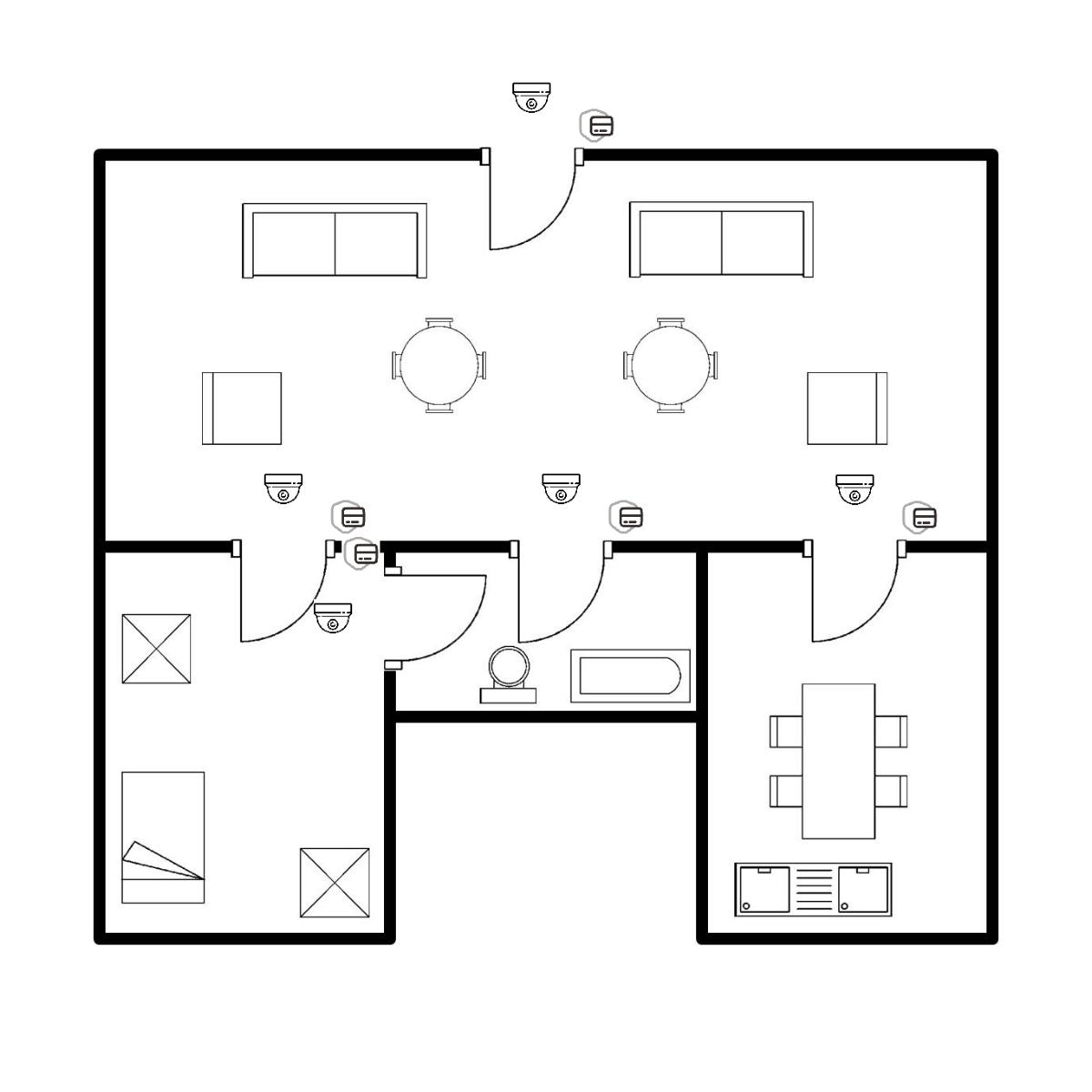
- Prediction2:
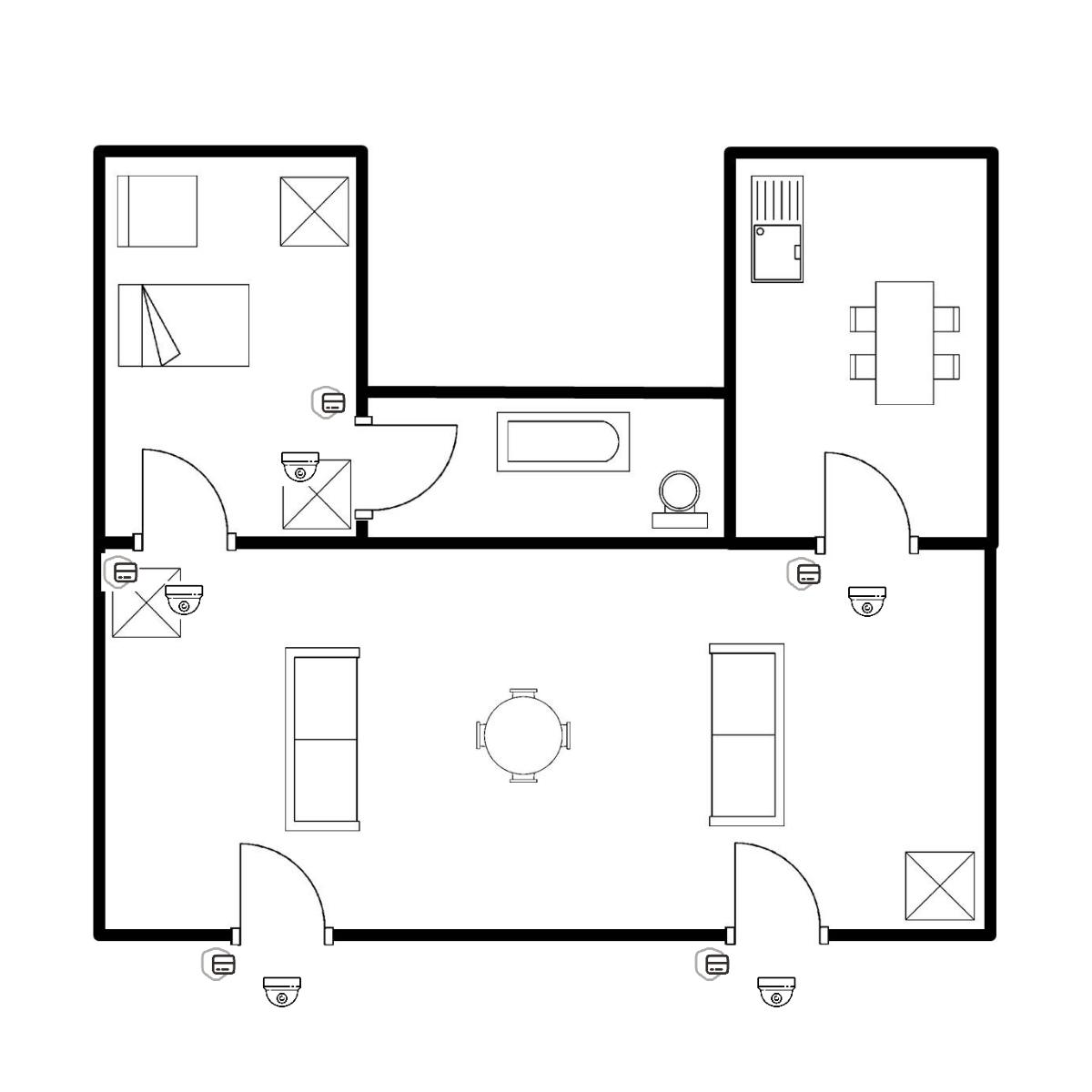
- Prediction1:

















