This package provides scripts to generate waypoints.
- Ubuntu 18.04
- ROS (Melodic)
- Python 2.7.x
- Download waypoints_generator_csv package.
$ cd ~/catkin_ws/src/
$ git clone https://github.com/HHorimoto/waypoints_generator_csv.git
$ cd ~/catkin_ws
$ catkin_make- Download necessary package for this package.
$ sudo apt-get install python-blessed # for key clickThe package provides three methods for generating waypoints, which can be selected via parameters in the launch file.
The resulting csv file will be saved graphs/.
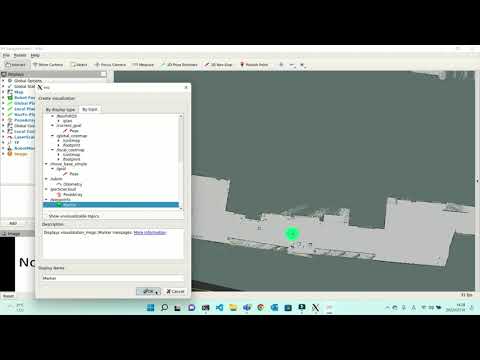
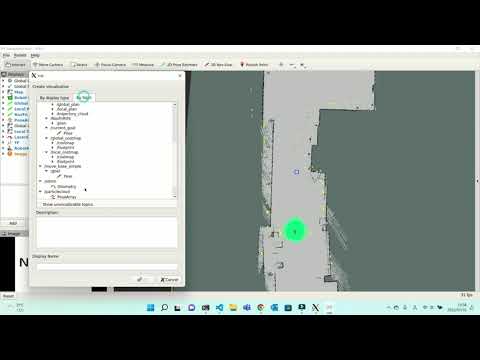
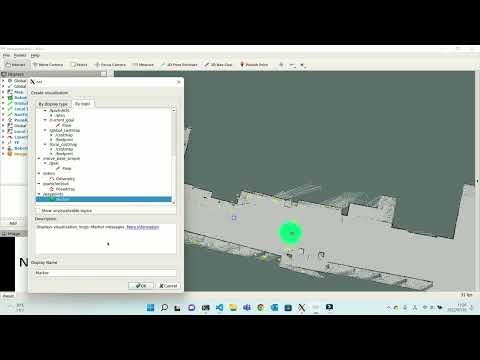
$ roslaunch waypoints_generator_csv waypoints_generator_csv.launchThe package also provides a script that just displays the generated waypoints in rviz. after you launch this, select the Marker topic from the add button in rviz.
$ roslaunch waypoints_generator_csv publish_marker.launch-
select : Which method generates waypoints.
key_click(k)orclicked_point(c)orthreshold(t). default :threshold -
file_name : Name of the file that contains the waypoints to be generated. default :
waypoints -
dist_th : Distance interval of waypoints for
threshold(t). default :7.0 [m] -
theta_th : Degree interval of waypoints for
threshold(t). default :60.0 [deg] -
use_debug_marker : Display waypoints saved in rviz or not. default :
true -
distance_tolerance : Radius of Marker circle default :
1.0 [m]
when you press Enter key on the keyboard, this script saves the current robot position as a waypoint.
when you press Publish Point button in rviz, the position will be saved as a waypoint.
When the set distance and angle thresholds are exceeded, the script automatically saves the position as a waypoint.