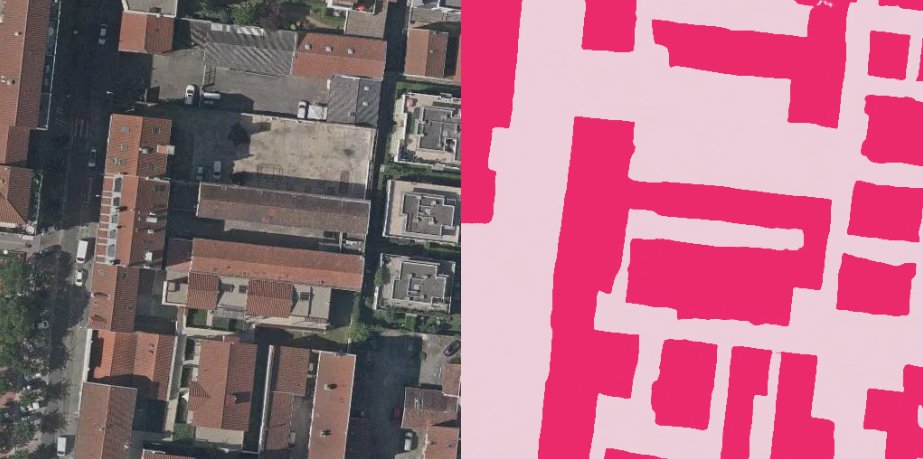
RoboSat.pink
Semantic Segmentation ecosystem for GeoSpatial Imagery
Spirit:
- Cutting edge Computer Vision research papers implementation
- Industrial code robustness
- Several tools, you can combine together (as Lego)
- Extensible, by design
- High performances
- Minimalism as a code aesthetic
- GeoSpatial standards compliancy
- OSM and MapBox ecosystems friendly
- PyTorch based
Aims:
- DataSet Quality Analysis
- Change Detection highlighter
- Features extraction and completion
Install:
1) Librairies prerequisites:
- gcc and Linux headers
- Python >= 3.6 and related pip installed
- Libs with headers: libjpeg, libwebp, libbz2, zlib, libsm and libxrender.
- Osmium tools
On a recent Ubuntu-server (e.g 18.04), could be done with:
sudo apt update
sudo apt-get install -y build-essential zlib1g-dev libjpeg-turbo8-dev libwebp-dev libsm6 libxrender1 python3-pip osmium-tool
2) RoboSat.pink Install:
python3 -m pip install RoboSat.pink
export PATH=$PATH:$HOME/.local/bin
Launch rsp -h to check that everything went smoothly.
3) Not mandatory but strongly recommanded: NVIDIA GPU(s) and related driver
- Tested with GTX and RTX series:
wget http://us.download.nvidia.com/XFree86/Linux-x86_64/418.43/NVIDIA-Linux-x86_64-418.43.run
sudo sh NVIDIA-Linux-x86_64-418.43.run -a -q --ui=none
Launch nvidia-smi to check this step.
WorkFlows:


Related resources:
- RoboSat.pink tutorial: from OpenData to OpenDataSet
- RoboSat.pink documentation: Extensibility by Design
- RoboSat.pink slides @PyParis 2018
- RoboSat.pink slides @FOSDEM 2019
- Historical MapBox RoboSat github directory (not active anymore)
- Christoph Rieke's Awesome Satellite Imagery Datasets
- Mr Gloom's Awesome Semantic Segmentation
Bibliography:
- The Lovász-Softmax loss: A tractable surrogate for the optimization of the IoU measure in neural networks
- U-Net: Convolutional Networks for Biomedical Image Segmentation
- Deep Residual Learning for Image Recognition
- Angiodysplasia Detection and Localization Using Deep Convolutional Neural Networks
- TernausNetV2: Fully Convolutional Network for Instance Segmentation
- Joint Learning from Earth Observation and OpenStreetMap Data to Get Faster Better Semantic Maps
Arch:

Contributions and Services:
-
Pull Requests are welcome ! Feel free to send code... Don't hesitate either to initiate a prior discussion throught tickets on any implementation question.
-
If you want to collaborate through code production and maintenance on a long term basis, please get in touch, co-edition with an ad hoc governance can be considered.
-
If you want a new feature, but don't want to implement it, DataPink provide core-dev services.
-
Expertise and training on RoboSat.pink are also provided by DataPink.
-
And if you want to support the whole project, because it means for your own business, funding is also welcome.
Authors:
- Daniel J. Hofmann https://github.com/daniel-j-h
- Olivier Courtin https://github.com/ocourtin