- 30days make a os
- Progress
- day05 包括之前的处理
- day06 分割编译与中断处理
- day07 FIFO 与鼠标控制
- day08 鼠标控制与 32 位模式切换
- day09 内存管理
- day10 叠加处理
- day11 制作窗口
- day12 定时器
- day13 继续优化定时器
- day14 提高分辨率和键盘输入
- day15 多任务并发
- day16 继续多任务
- day17 实现命令行窗口
- day18 终端命令
- day19 应用
- day20 API
- day21 保护操作系统
- day22 编写 C 语言应用程序
- day23 图形处理相关
- day24 窗口操作
- day25 增加命令行窗口
- day26 为窗口移动提速
- day27 LDT 与库
- day28 文件操作与文字显示
- TODO
- Progress
- just note my daily practice
- day01 ~ day04 were missing because this repo was created at the very 5 day
- 将 bootpack.c 进行分割,更改 makefile 编译
- PIC 分为主 PIC 和从 PIC,主 PIC 的第 2 个 IO 引脚连接从 PIC,对其注册后接收从 PIC 的中断信号
- 初始化 PIC,处理鼠标和键盘中断,接收电气中断但不处理
- 键盘中断处理顺利,鼠标中断处理有问题,暂时没找到原因

- 整理文件
- 创建 FIFO 缓冲区,优化键盘数据和鼠标数据接收速度
- 通过资料得出鼠标的处理电路集成在键盘处理电路上,向键盘电路发送指令注册鼠标处理电路然后才能接收中断
- 鼠标一次性发送 3 字节数据,需要比键盘更大的缓冲区
- 对 FIFO 缓冲区进行优化,采用循环链表,不需要进行移位操作,提高缓冲区处理速度和性能

- 整理文件
- 对鼠标发送的 3 字节数据进行处理,采用
switch提高处理速度,在for(;;)里进行不断的接收数据 - 鼠标的渲染会将其他画面的渲染覆盖,思考处理方式
- haribote.sys - 9.21KB

- 整理文件
- 通过对内存每字节写入数据进行容量检查
- 单个字节写入太慢,每 4KB 的开头一个字节写入,写入后重置原状态,提高检查速度
- 开机先进行内存容量检查(是否有内存坏块)
- 由于 386 架构以上 CPU 有高速缓存,所以在内存检查时检查架构
- 通过检查 EFLAGS 寄存器的 AC 标志位(第 18 位)是否为 1 并设置为 0 关闭高速缓存
- 进行内存检查
memtest()后再重置为原状态
- 编译器会自动优化
memtest(),决定用汇编
- 由于 386 架构以上 CPU 有高速缓存,所以在内存检查时检查架构
- 采用列表式段内存管理分配 - 管理 3GB 的内存只需要 8KB 左右的空间
- 系统目前的内存分区表
- haribote.sys - 8.95KB
| 地址 | 用途 | ||| | 0x00000000 ~ 0x000fffff | 在启动中使用,但之后变空 (1MB) | | 0x00100000 ~ 0x00267fff | 用途保存磁盘的内容 (1440KB) | | 0x00268000 ~ 0x0026f7ff | 空(30KB) | | 0x0026f800 ~ 0x026fffff | IDT(2KB) | | 0x00270000 ~ 0x0027ffff | GDT (64KB) | | 0x00280000 ~ 0x002fffff | bootpack.hrb(512KB) | | 0x00300000 ~ 0x003fffff | 栈及其他(1MB) | | 0x00400000 ~ | 空 |

- 整理文件
- 继续改善内存管理,考虑到进行大量的内存分配释放后,内存中会出现不连续的空闲碎片,占用
man->frees段数量 - 编写总是以 0x1000 字节(4KB)为单位进行分配或释放的函数,采用与运算进行舍入运算
- 通过内存管理的**创建一个图层渲染管理(叠加处理)的函数
- 通过结构体
SHEET记录图层的各种信息,SHEETCTL结构体对所有图层进行记录管理,设置图层最多 256 个 - 编写画面刷新函数,使用透明色对鼠标的背景颜色进行重新绘制
- 全局画面刷新性能太差,采用局部刷新,提高画面刷新的速度和性能
- haribote.sys - 10.8KB

- 鼠标显示问题,设置为可以隐藏,让局部刷新函数不刷新画面外的内容(增加
if判断限制范围) - 简化
sheet.c的函数调用,将SHTCTL设置到sheet层级窗口内部 - 添加了绘制窗口的函数
make_window8,修正了字体hankaku- 关闭按钮来自鼠标绘制算法
- 窗体修改了初始化屏幕算法
- 添加一个层级(一下统称窗口)时的步骤:
// 声明此窗口的缓冲区 unsigned char *win_buf; // 向层级管理中注册此窗口 sht_win = sheet_alloc(SHTCTL); // 向内存管理器申请内存 160 * 68 = 10880 win_buf = (unsigned char *) memman_alloc_4k(memman, 160 * 68); // 设置窗口的信息 sheet_setbuf(sht_win, buf_win, 160, 68, -1); // 创建窗口 make_window8(buf_win, 160, 68, "Window"); // 设置窗口在移动时能够进行叠加刷新 sheet_slide(sht_win, 80, 72); // 设置窗口叠加显示的优先级 sheet_updown(sht_win, 1);
- 添加高速计数器窗口,但是显示的内容在闪烁,判断应该是
sheet_refresh的问题sheet_refresh**:从显示优先度低的先刷新,然后到高的刷新- 既然
Windows没有这种闪烁,就肯定有解决办法
- 消除了窗口的闪烁,在
sheet_refresh函数里添加了一个高度参数,只有此高度以上的窗口才进行刷新,但是鼠标会闪烁- 思路:在鼠标所在的
VRAM不进行处理
- 思路:在鼠标所在的
- 在内存开辟一块空间存放
VRAM的映射,储存在struct SHTCTL->vmap,用图层号码而不是色号存入内存地址 - 每一次画面的变动都会相应的在
SHTCTL->vmap记录,在sheet_refreshsub改动使其每次对照vmap的内容对vram进行写入 - 避免从下往顶刷新,创建高度限定参数
h1,对调用sheet_refreshsub的其他函数进行修改

- 使用定时器(PIT Programmable Interval Timer)
- 要管理定时器需要对定时器进行设定
- 定时器在以前是作为单独的芯片安装在主板上,现在和 PIC 一样被集成到了其他芯片里
- 连接 IRQ(引脚) 的 0 号,只要设定了 PIT 就可以设定 IRQ0 的中断间隔
; IRQ0 的中断周期变更
AL= 0x34:OUT(0x43,AL)
AL= 中断周期的低 8 位 ;OUT(0x40,AL)
AL= 中断周期的高 8 位 ;OUT(0x40,AL)
; 中断产生的频率 = 主频 / 设定的数值
; 指定中断周期为 0,默认为 65536
; 设定周期为 1000,中断产生的频率为 119.318HZ
; 设定为 11932,频率就是 100HZ
; 11932 = 0x2e9c- 从
IRQ0的中断变更可以看出需要执行 3 次 OUT 指令来完成设定,第一个指令的输出地址为 0x43,激活IRQ0中断
#define PIT_CTRL 0x004
#define PIT_CNT0 0x0040
void init_pit()
{
io_out8(PIT_CTRL, 0x34);
io_out8(PIT_CNT0, 0x9c);
io_out8(PIT_CNT0, 0x2e);
}- 在中断记录表里注册计时器中断在
0x20地址 - 使用
PIT记录开机时间- 定义
struct TIMERCTL,定义一个count变量 - 初始化时设置
count = 0,每次发生中断时,count++
- 定义
- 设置一个定时器,到达时间后显示
- 此时的
TIMERCTL
- 此时的
// 计时器管理
// 计时 count
// 剩余时间 timeout
// 缓冲区 fifo
// 剩余时间没有后需要向缓冲区写入的数据 data
struct TIMERCTL {
unsigned int count;
unsigned int timeout;
struct FIFO8 *fifo;
unsigned char data;
};- 写一个倒计时函数`settimer()`
- 在`bootpack.c`中进行相应的处理
- 设置多个定时器,思路和图层管理器一样,设置一个定时器管理,预先设置好最多能有
500个定时器 - 绘制闪烁光标,方便以后使用在文本编辑器,终端等应用场景中
- 加快中断处理
timeout不再是剩余时间,而是给定的计时时间,免除了每次中断处理需要当前活动计时器的timeout自减的操作 - 由于
timectl.count的类型是int,最大值为0xffffffff,不能无限制计时,设定为 1 年时间后计时器归零- 或许有更好的方法,是否应该储存为年月日时分秒形式?
- 再次加快中断处理
- 原
timer.c中断处理
- 原
// 定时器中断处理
void inthandler20(int *esp)
{
int i;
io_out8(PIC0_OCW2, 0x60); // 把 IRQ-00 信号接收完了的信息通知给 PIC
timerctl.count++;
for (i = 0; i < MAX_TIMER; i++) {
if (timerctl.timer[i].flags == TIMER_FLAGS_USING) {
if (timerctl.timer[i].timeout <= timerctl.count) {
timerctl.timer[i].flags = TIMER_FLAGS_ALLOC;
fifo8_put(timerctl.timer[i].fifo, timerctl.timer[i].data);
}
}
}
}由于设置的 1ms 发生一次中断,1s = 100 次中断,MAX_TIMER = 500,所以 1s 执行 50000 次 if,49998 次是无用功
- 添加
timerctl.next优化timer.c- 短时先判断 - 继续优化中断处理,用
struct SHTCTL思路在struct TIMERCTL中创建一个排序好的timers - haribote.sys 23.1KB

- 修复了 day12 的 bug,应该是
j > i而不是j < i - 简化叠加处理字符串显示
- 调整计时器缓冲区
timerfifo,优化了过程 - 性能测试
| 版本 | 虚拟机 |
|---|---|
| day12 | 113228031 |
| day12 | 115222105 |
| day12 | 115367183 |
| day12 | 114781422 |
- 整合缓冲区,
timer, keyboard, mouse使用一个缓冲区struct FIFO32 *fifo - 性能测试
| 版本 | 虚拟机 |
|---|---|
| day13 | 211905694 |
| day13 | 212633087 |
| day13 | 211646820 |
| day13 | 211641338 |
- 整合缓冲区后性能提升 1.85 倍
- 加快中断处理
- 用单向链表管理
timers,timer->next指向下一个定时器地址,提高性能
- 用单向链表管理
- 设置哨兵在
timer.c中简化程序,使timer_settime()从 4 种情况变为 2 种 - haribote.sys - 22.9KB

-
提高分辨率,通过修改 BIOS 的 13 号中断,用汇编向累加寄存器写入模式
-
资料
每次发布新显卡时,分辨率,性能都会提高,以前是 IBM 公司决定电脑各种规格(比如画面规格),所以厂商就迎合规格来制作显卡 但是慢慢显卡公司的技术超越的 IBM,在 IBM 发布规格前就出现了各种画面模式的显卡,显卡公司竞争激烈,显示模式百花齐放 由于画面模式太多,所以显卡公司成立了 VESA 协会(Video Electronics Strandards Association 视频电子标准协会) 此协会制定了通用的(generic)显示设定方法,制作了专用的 BIOS 功能 VEB(VESA BIOS extension) 使用 VBE 就可以使用显卡的高分辨率功能
-
切换到不用 VBE 的画面模式用
AH=0
AL= 画面模式号码- 切换到使用 VBE 的画面模式用
AX=0x4f02
BX= 画面模式号码- VBE 画面模式号码如下
| 号码 | 画面模式 |
|---|---|
| 0x101 | 640x480x8bit |
| 0x103 | 800x600x8bit |
| 0x105 | 1024x768x8bit |
| 0x107 | 1280x1024x8bit |
- 兼容真机,先判断是否有支持此类画面模式的显卡,如果没有,禁用 VBE,写入在
asmhead.nas - 画面模式信息
| 大小 | 地址 | 解释 |
|---|---|---|
| WORD | [ES:DI+0x00] | 模式属性,第七位不是 1 就不好整 |
| WORD | [ES:DI+0x12] | X 分辨率 |
| WORD | [ES:DI+0x14] | Y 分辨率 |
| BYTE | [ES:DI+0x19] | 颜色必须为 8bit |
| BYTE | [ES:DI+0x1b] | 颜色指定方法必须为 4(调色模式) |
| DWORD | [ES:DI+0x28] | VRAM 的地址 |

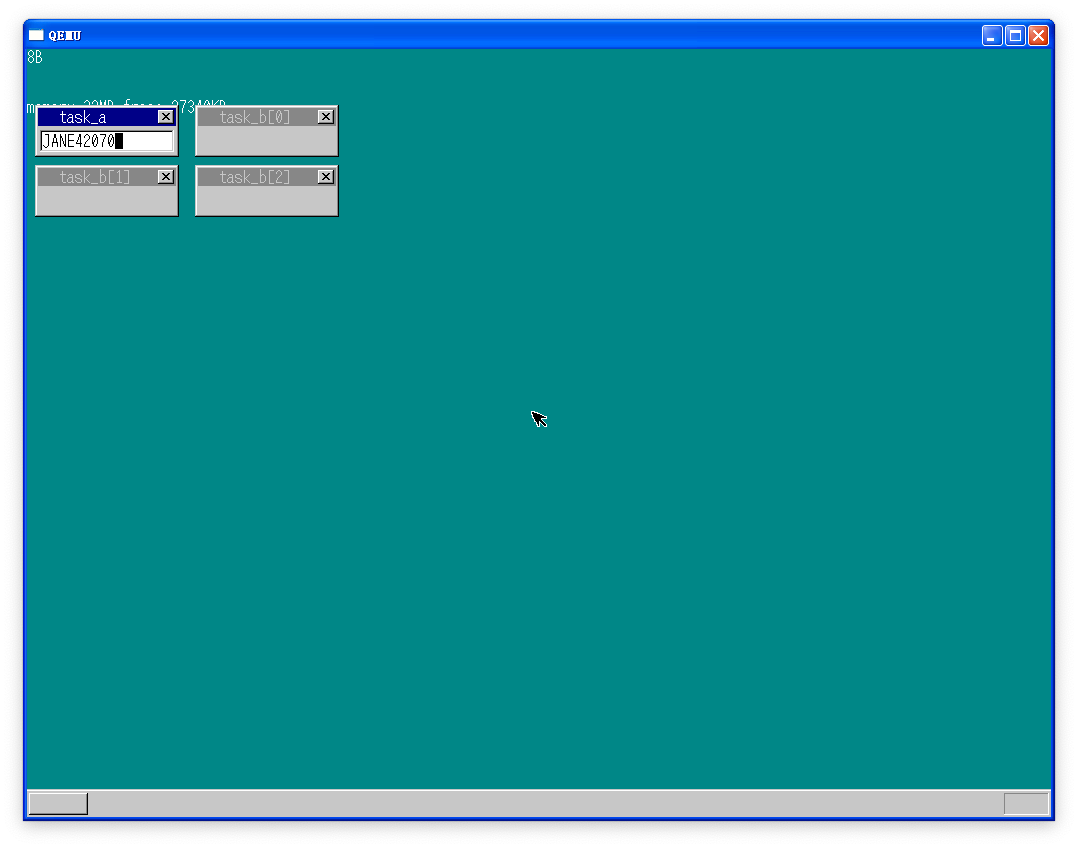
-
开发键盘输入
-
开发输入框和输入光标
-
修复了窗口外渲染的 bug,之前一直没有发现,理论上性能应该在修复后有所提升
-
添加了拖动窗口的支持
-
修复了纵向窗口外渲染的 bug,希望没有渲染的 bug 了
-
haribote.sys - 23.6KB


struct TSS任务状态段- 通过
JMP 3 * 8:0x00000000 far jump
JMP 0x1234
; 就是
MOV EIP,0x1234- 使用定时器 0.02s 进行一次任务切换
- 实现了多任务并发

- 通过层级管理器
struct SHEETCT的思路创建自动化的任务管理器struct TASKCTL
| func | work |
|---|---|
| task_init() | 对所有的预分配任务进行初始化 |
| task_alloc() | 分配一个任务 |
| task_run() | 运行任务 |
| task_switch() | 让任务并发执行 |
- 实现任务自动休眠和唤醒
- 当多个任务同时在运行时,会出现有些任务频繁运行的需求没有这么高的情况,让其他任务全力运行,需求少的先休眠,当需要时再将其唤醒
- 思路:确定需要休眠的任务,判断任务是否处于激活状态,如果处于则需要在任务休眠后进行任务交换
ts = 1,再查找当前任务再任务管理器中的位置,将其task->flag置为未运行状态,然后将taskctl->now--,再将taskctl中的运行的任务组进行移位操作,在判断ts == 1,进行任务跳转 - 自动激活则判断
FIFO缓冲区是否有此任务的数据写入,如果有则激活该任务,需修改fifo.c - 将
task添加到FIFO缓冲区结构体中,这样就免去了判断是哪个任务在缓冲区写入数据的麻烦
struct FIFO32 {
int *buf;
int w, r, size, free, flags;
struct TASK *task;
};- 实现完成,测试性能
- 性能比之前提升 2.19 倍左右
- 增加窗口数量,更多的任务
- 整理代码结构并优化,进行真机测试


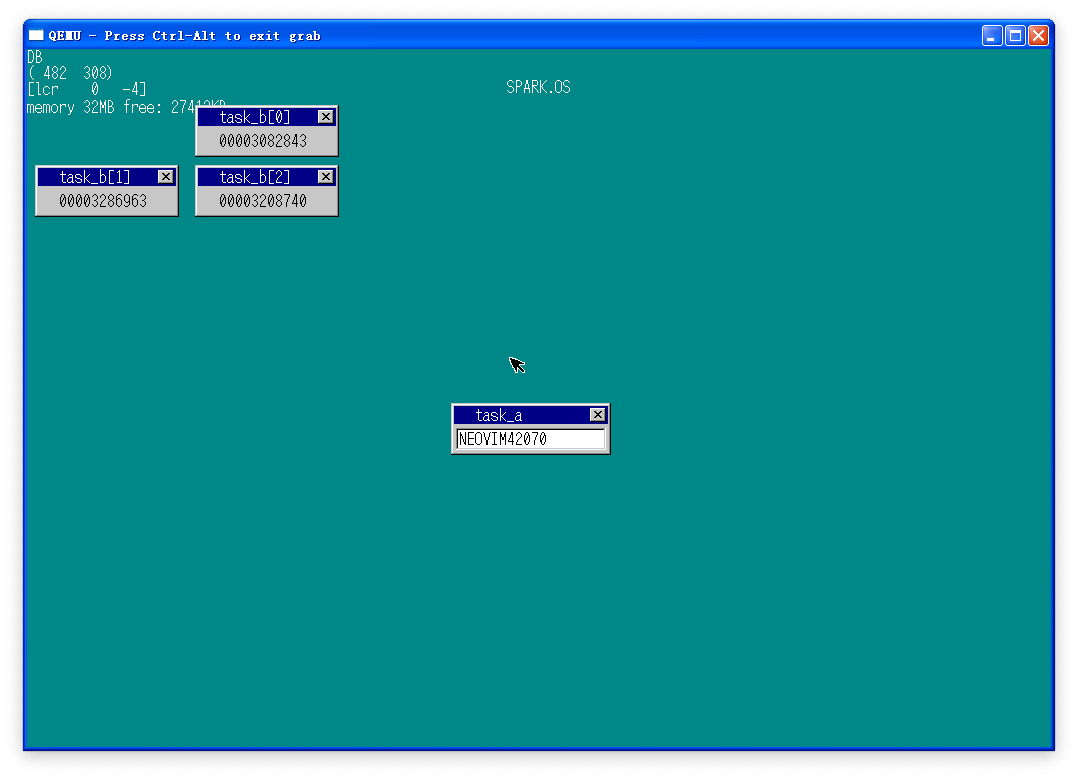
| OS | task_b[0] | task_b[1] | task_b[2] |
|---|---|---|---|
| spark | 47355888 | 47350753 | 47355859 |
| haribote | 44651103 | 44829920 | 44748655 |
- 提升了 17.4% 的性能
- 设置任务优先级
- 有些时候需要任务进行全力运行,多个任务公平分配资源会让需要全力运行的任务表现无法达到预期
- 任务切换间隔从 0.02 秒修改为 0.01 秒~0.1 秒的范围,通过延长切换的时间间隔使任务全力运行更长的时间,达到最大 10 倍的优先级差异
struct TASK {
int sel, flags; // sel 代表 GDT 编号
int priority; // 任务优先级
struct TSS32 tss; // 任务的属性
}-
思路:任务被创建时默认优先级为 0.02 秒,通过
task_run()方法可以在启动任务的同时设定优先级,在进行任务切换的时候task_switch()进行优先级的定时器设置,判断当前任务是否有多个,决定是否执行任务切换farjmp(0, task->sel),修改fifo32_put()中的激活任务task_run(fifo->task, 0),将优先级设置为 0,立即激活任务 -
修改
bootpack.c让task_b[]优先级变为1, 2, 3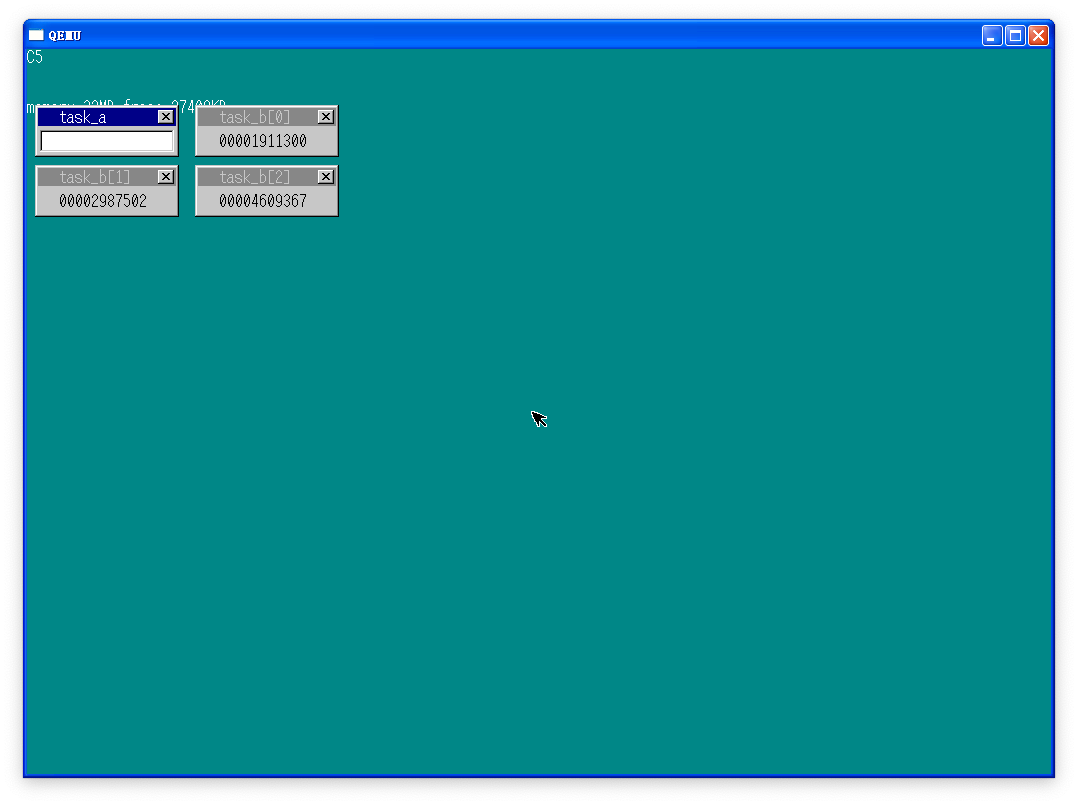
-
处理速度正好是 1, 2, 3 倍,成功
-
继续设定任务优先级
-
问题
- 鼠标移动速度很卡顿,特别是拖动窗口时
- 如果相同高优先级的任务太多,他们最多为 1s 切换,这样就明显看得出系统卡顿,同优先级的任务应该在短时间内互相切换,比如 0.02s
-
思路:创建多个优先级的任务容器,当高级别的任务容器有任务运行时,低级别的全部休眠,直到高级别的任务运行全部完成
-
当拖动鼠标和窗口时,
task_b[]处理速度下降,目标实现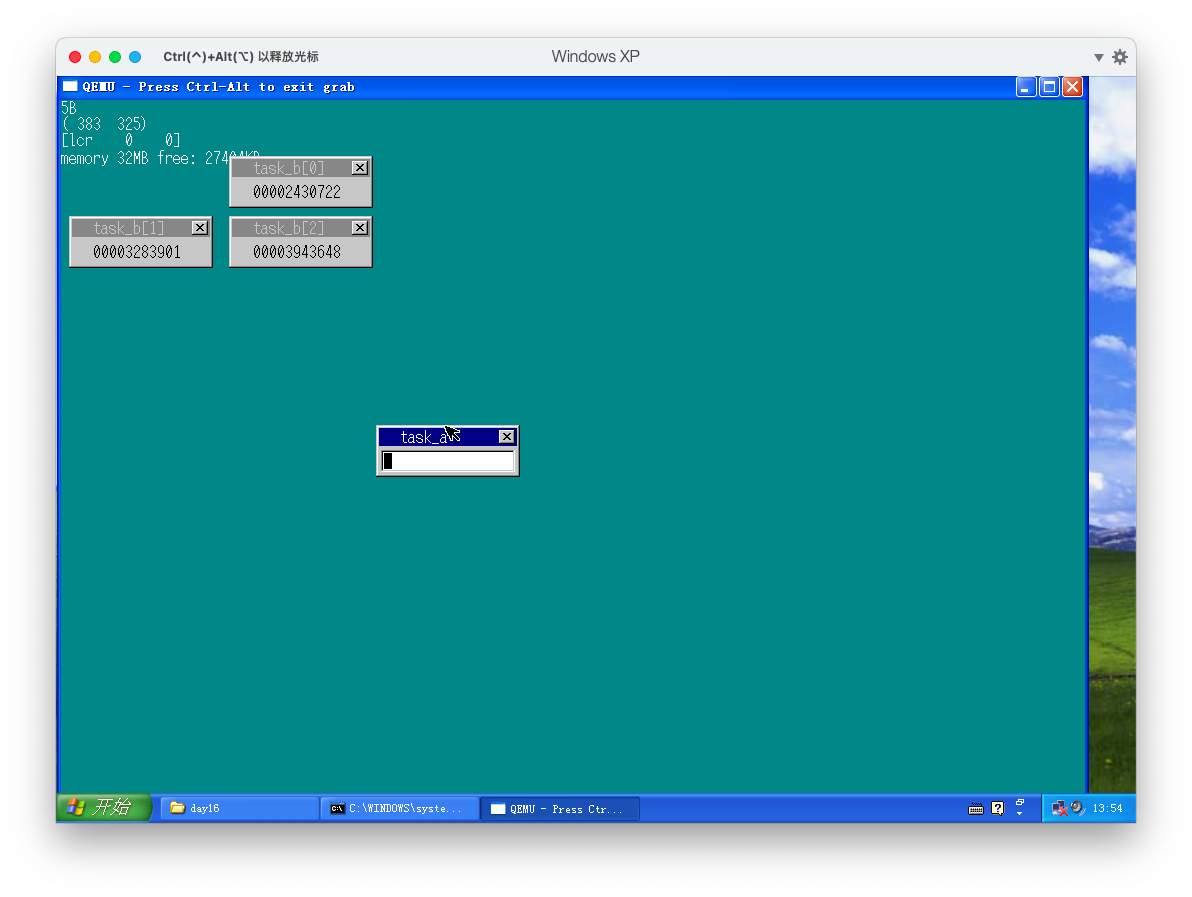


- 在 day16 中,任务 A 下面的 LEVEL 中有任务 B0~B2,因此 FIFO 为空时可以让任务 A 进入休眠状态,如果并没有启动其他任务,只有一个任务 A 的话,会怎么样呢?
- 如果不对 A 任务进行改写,进入休眠状态后任务管理器就会寻找其他任务,但是并没有其他任务,就会进入异常
- 改进思路
- 在 LEVEL 中没有任务的时候,进行 HLT
- 创建一个哨兵(一个永远存在的任务)
- 在任务管理器初始化的时候创建哨兵
- 哨兵的优先级为最低,10 级,不会抢占其他任务的资源,只是起监视作用
// 哨兵
void task_idle()
{
for (;;) io_hlt();
}
// task_init() 节选
// 哨兵初始化
idle = task_alloc();
idle->tss.esp = memman_alloc_4k(memman, 64 * 1024) + 64 * 1024;
idle->tss.eip = (int) &task_idle;
idle->tss.es = 1 * 8;
idle->tss.cs = 2 * 8;
idle->tss.ss = 1 * 8;
idle->tss.ds = 1 * 8;
idle->tss.fs = 1 * 8;
idle->tss.gs = 1 * 8;
task_run(idle, MAX_TASKLEVELS - 1, 1);
// bootpack.c 节选
// 注释 task_run(task_b[i], 2, i + 1);- 测试单独执行任务的情况
- 编写终端
- 我很喜欢命令行界面,命令行能给我自在的感觉
- 制作终端窗口
task_cons和终端下的blinking cursor - 实现
<TAB>窗口切换


- 实现字符输入
- 思路
- 只要在键盘按下的时候向
console_task的缓冲区FIFO发送数据即可,将FIFO加入struct TASK
- 只要在键盘按下的时候向
- 解决符号输入
| 键位 | 按下 | 抬起 |
|---|---|---|
| rShift | 0x2a | 0xaa |
| lShift | 0x36 | 0xb6 |
- 定义一个
int key_shift- lShift 按下时
key_shift = 1 - rShift 按下时
key_shift = 2 - 都按下时
key_shift = 3
- lShift 按下时
- 通过
key_shift的值判断需要用哪套字符编码 - 添加大小写字母输入
| 位置 | 状态 |
|---|---|
| binfo->leds 的第 4 位 | ScrollLock 状态 |
| binfo->leds 的第 5 位 | NumLock 状态 |
| binfo->leds 的第 6 位 | CapsLock 状态 |
- 完成对小写字母输入支持
- 对各种锁定键的支持
| 编码 | 键位 |
|---|---|
| 0x3a | CapsLock |
| 0x45 | NumLock |
| 0x46 | ScrollLock |
-
参考 os.dev 的 (AT)Keyboard 支持对键盘 led 灯的控制
-
关于 LED 的控制
- 对于 NumLock 和 CapsLock 等 LED 的控制,可采用下面的方法向键盘发送指令和数据
- 读取状态寄存器,等待 bit1 的值变为 0。
- 向数据输出(0060)写入要发送的 1 个字节数据。
- 等待键盘返回 1 个字节的信息,这和等待键盘输入所采用的方法相同(用 IRQ 等待或者用轮询状态寄存器 bit1 的值直到其变为 0 都可以)
- 返回的信息如果为 0xfa,表明 1 个字节的数据已成功发送给键盘。如为 0xfe 则表明发送失败,需要返回第 1 步重新发送
- 要控制 LED 的状态,需要按上述方法执行两次,向键盘发送 EDxx 数据。其中,xx 的 bit0 代表 ScrollLock,bit1 代表 Numlock,bit2 代表 CapsLock(0 表示熄灭,1 代表点亮)。bit3~7 为保留位,置 0 即可。
- 对于 NumLock 和 CapsLock 等 LED 的控制,可采用下面的方法向键盘发送指令和数据
-
思路,因为向键盘控制器发送指令激活 led 灯的时候,键盘会返回是否成功的数据,创建一个键盘缓冲区
keycmd_buf[32]接收键盘控制器返回的值,通过io_out8()对键盘控制器发送数据,通过检查缓冲区中的值查看 led 是否点亮,wait_KBC_sendready()等待键盘控制电路发送数据,如果控制电路返回失败,则重新发送
- 在当前窗口闪烁光标,而不是全局闪烁光标,参考至 Windows
- 实现任务 A 的光标闪烁
- 控制命令行的光标闪烁

- 添加对回车键的支持

- 支持窗口滚动
- 制作终端命令
| 命令 | 功能 |
|---|---|
| mem | 内存 |
| clear | 清屏 |
| uname | 系统名 |
- 期望的终端命令 - todo list
- 历史记录,返回上一条命令
| 命令 | 功能 |
|---|---|
| help | 列出所有命令 |
| ls | 列出所有文件 |
| cat | 预览文件内容 |
| ... | ... |

- cat 命令
// 文件信息
struct FILEINFO {
unsigned char name[8], ext[3], type;
char reserve[10];
unsigned short time, date, clustno;
unsigned int size;
};- 通过二进制编辑器发现
| 文件名 | 数据 | clustno | 地址 |
|---|---|---|---|
| HARIBOTE.SYS | 02 00 | 0x0002 | 0x004200 |
| IPL10.NAS | 39 00 | 0x0039 | 0x00b000 |
| MAKE.BAT | 3F 00 | 0x003f | 0x00bc00 |
clustno = 0x0002 -> 0x004200
clustno = 0x0039 -> 0x00b000
clustno = 0x003f -> 0x00bc00
// 六个簇
0x003f - 0x0039 = 6
0x00bc00 - 0x00b00 = 0xc00
// 六个扇区
0xc00 / 6 = 512
// 得出
address = clustno * 512 + 0x003e00
0x0002 * 512 + 0x004200 = 0x000400 + 0x003e00 = 0x004200
0x0039 * 512 + 0x00b000 = 0x007200 + 0x003e00 = 0x00b000
0x003f * 512 + 0x00bc00 = 0x007e00 + 0x003e00 = 0x00bc00
- cat 命令改进
- 支持换行符
| 编码 | 字符 |
|---|---|
| 0x09 | 制表符 |
| 0x0a | 换行符 |
| 0x0d | 回车符 |
-
忽略回车符
-
添加对 FAT 的支持
-
整理代码
-
第一个应用程序
- HALT - 停止运行!
[BITS 32]
fin:
HLT
JMP fin- 将环境改为 Arch linux
- 安装运行 32 位程序的 gcc 库
sudo pacman -S lib32-gcc-libs, lib32-glibc- 整理代码
console.c -> terminal.c- 分割函数功能

- 编写显示单个字符的 API
- 如果直接调用
terminal.c的term_putchar()需要手动查找其函数的地址,且需要在调用函数之前将参数推入栈中,非常麻烦 - 通过用汇编
naskfunc.asm编写一个推入栈的函数并且调用term_putchar()方法(封装),只需要知道_asm_term_puchar的地址就行了
- 如果直接调用
; naskfunc.asm
_asm_term_putchar:
PUSH 1
AND EAX,0xff ; 将 AH 和 EAX 的高位置 0,将 EAX 置为已存入字符编码的状态
PUSH EAX
PUSH DWORD [0x0fec] ; 读取内存并 PUSH 该值
CALL _term_putchar
ADD ESP,12 ; 将栈中的数据丢弃
RETF
; halt.asm
[BITS 32]
MOV AL,'A'
CALL 2*8:0xBFC ; 应用程序对 API 执行 CALL 的时候,要加上操作系统的段号,使用 farcall 并将 naskfunc.nas 中 RET 改为 RETF
fin:
HLT
JMP fin
-
结束应用程序,在应用程序执行完成后返回操作系统的段
1003 * 8- 编写
farcall()函数,在执行halt完成后调用回到操作系统段
; naskfunc.asm _farcall: ; void farcall(int eip, int cs); CALL FAR [ESP+4] ; eip, cs RET
terminal.c
// halt 应用 void cmd_halt(struct TERM *term, int *fat) { struct MEMMAN *memman = (struct MEMMAN *) MEMMAN_ADDR; struct FILEINFO *finfo = file_search("halt.hrb", (struct FILEINFO *) (ADR_DISKIMG + 0x002600), 224); struct SEGMENT_DESCRIPTOR *gdt = (struct SEGMENT_DESCRIPTOR *) ADR_GDT; char *p; if (finfo != 0) {// 找到文件 p = (char *) memman_alloc_4k(memman, finfo->size); file_loadfile(finfo->clustno, finfo->size, p, fat, (char *) (ADR_DISKIMG + 0x003e00)); set_segmdesc(gdt + 1003, finfo->size - 1, (int) p, AR_CODE32_ER); farcall(0, 1003 * 8); // 这里! memman_free_4k(memman, (int) p, finfo->size); } else {// 没有找到文件 putfonts8_str_sht(term->sht, 8, term->cur_y, COL8_FFFFFF, COL8_000000, "File not found"); term_newline(term); } }
- 修改
halt.asm返回为RETF - 因为修改了操作系统的代码,所以重新定位
_asm_term_putchar的地址0x00000C01 : _asm_term_putchar
- 编写
-
如果修改了操作系统的代码,就需要再次查看
_asm_term_putchar的地址,太麻烦了,编写一个不随系统版本而改变的 API- 思路:在操作系统的中断记录表中注册此 API 在 0x40 号,就不需要调用地址了,直接进行中断处理
INT 0x40 - MOS-DOS 的 API 采用的也是这种 INT 方式
- 但是在 INT 指令调用的时候会被视作中断来处理,用 RETF 是无法返回的,需要使用 IRETD 指令,需要改写
naskfunc.asm - INT 中断执行的时候 CPU 会默认关闭所有中断(CLI 指令),在此不需要,只是调用此函数,API 处理电脑像死机了一样体验可不好
- 思路:在操作系统的中断记录表中注册此 API 在 0x40 号,就不需要调用地址了,直接进行中断处理
-
给应用程序命名
- 思路:创建一个 cmd_app() 函数查找应用程序,如果找到了执行并返回 1,反之先加上扩展名 hrb 查找,若还是没找到,则返回 0



-
寄存器问题
- 在修改 hello.asm 显示字符串的时候只显示第一个字符,因为在调用 0x40 中断的时候 ECX 寄存器的值发生了变化,应该是_term_putchar 改动了 ECX 的值
- 加上 PUSHAD 和 POPAD 确保可以将全部寄存器的值还原,这样程序就能正常运行
-
创建显示字符串的 API
- 思路:像单字符显示 API 一样
- 借鉴 BIOS 的调用方式,在寄存器中存入功能号,使得 1 个 INT 可以选择调用不同的函数
- BIOS 中,存放功能号的函数是 AH,最多只能存入 256 个 API 函数,改用 EDX 存放功能号,可以设置多达 42 亿个 API 函数
| 功能号 | 函数 | 寄存器 |
|---|---|---|
| 1 | 显示单个字符 | AL = 字符编码 |
| 2 | 显示字符串 0 | EBX = 字符串地址 |
| 3 | 显示字符串 1 | EBX = 字符串地址,ECX = 字符串长度 |
_asm_hrb_api:
STI ; 开启中断
PUSHAD ; 用于保存寄存器值的 PUSH
PUSHAD ; 用于向 hrb_api 传值的 PUSH
CALL _hrb_api
ADD ESP,32
POPAD
IRETD- 用 C 语言编写 API 处理程序
- 用 switch 语句通过判断 EDX 跳转到对应 API
- 通过_asm_hrb_api 得到相应寄存器的值,进行操作
- 将 INT 0x40 改为调用_asm_hrb_api
- 改写应用程序,定义需要调用的 API
; hello.asm
[INSTRSET "i486p"]
[BITS 32]
MOV ECX,msg
MOV EDX,1
putloop:
MOV AL,[CS:ECX]
CMP AL,0
JE fin
INT 0x40
ADD ECX,1
JMP putloop
fin:
RETF
msg:
DB "hello",0
; hello2.asm 使用系统内置的字符串显示 API term_putstr()
[INSTRSET "i486p"]
[BITS 32]
MOV EDX,2
MOV ECX,msg
INT 0x40
RETF
msg:
DB "hello2",0- 遇到了 BUG,hello.hrb 运行正常,但 hello2.hrb 出现异常,内存段的问题
- 显示单个字符时,用 [CS:ECX] 的方式制定了 CS(代码段寄存器),因此可以成功读取 msg 的内容
- 但是在显示字符串时,由于无法指定段地址,程序认为是 DS 而从完全错误的内存地址中读取了内容
- 思路:cmd_app() 知道代码段的内存地址,将代码段地址设置为 0xfe8,然后在 hrb_api 的字符串显示中加上 0xfe8

- 用 C 语言编写应用程序
- 思路:写一个 asm 的显示字符 API,通过 C 语言调用 API 达到显示字符的效果
- a_nask.asm 和 naskfunc.asm 的显示字符函数一样
- 通过修改 cmd_app() 函数的加载应用程序方法
- 通过文件大小判断其是否为 C 语言应用,如果是,则修改内容在头地址加上执行主函数的汇编语句
; e8 16 00 00 00 cb
CALL, 0x1b
RETF-
修改对应的 Makefile 文件
-
保护操作系统
- 防止恶意应用操作,修复漏洞
- 创建一个修改内存地址值的应用

void HariMain()
{
*((char *) 0x00102600) = 0;
}
- 思路:创建内存等级;操作系统专用内存,应用专用内存
- 应用专用内存空间先分配 64KB
| 用途 | 内存段 |
|---|---|
| 操作系统用代码段 | 2 * 8 |
| 操作系统用数据段 | 1 * 8 |
| 应用程序用代码段 | 1003 * 8 |
| 应用程序用数据段 | 1004 * 8 |
| TSS 任务段 | 3 * 8 ~ 1004 * 8 |
- 重写 naskfunc.asm 中断处理

- 阻止了恶意程序的破坏,但是没有终止此程序运行
- 对异常的支持
- 强制结束程序功能
- 思路:在中断号 0x0d 中注册一个函数
- 在 x86 架构规范中,当应用程序试图破坏操作系统,或者试图违背操作系统的设置时,就会自动产生 0x0d 中断,因此该中断也被称为“异常”
_asm_inthandler0d:
PUSH ES
PUSH DS
PUSHAD
MOV AX,SS
CMP AX,1*8
JNE .from_app
; 如果操作系统活动时产生的中断情况和之前差不多
MOV EAX,ESP
PUSH SS ; 保存中断时的 SS
PUSH EAX ; 保存中断时的 ESP
MOV AX,SS
MOV DS,AX
MOV ES,AX
CALL _inthandler0d
ADD ESP,8
POPAD
POP DS
POP ES
IRETD
.from_app:
; 当应用程序活动时发生中断
MOV EAX,1*8
MOV DS,AX ; 先仅将 DS 设定为操作系统专用
MOV ECX,[0xfe4] ; 操作系统的 ESP
ADD ECX,-8
MOV [ECX+4],SS ; 保存中断时的 SS
MOV [ECX],ESP ; 保存中断时的 ESP
MOV SS,AX
MOV ES,AX
MOV ESP,ECX
STI
CALL _inthandler0d
CLI
CMP EAX,0
JNE .kill
POP ECX
POP EAX
MOV SS,AX ; 将 SS 设回应用程序用
MOV ESP,ECX ; 将 ESP 设回应用程序用
POPAD
POP DS
POP ES
ADD ESP,4 ; INT 0x0d 需要这个值
IRETD
.kill
; 强制结束应用程序
MOV EAX,1*8 ; 操作系统用的 DS/SS
MOV ES,AX
MOV SS,AX
MOV DS,AX
MOV FS,AX
MOV GS,AX
MOV ESP,[0xfe4] ; 强制返回到 start_app 时的 ESP
STI ; 切换完成后恢复中断请求
POPAD ; 恢复事先保存好的寄存器值
RET- qemu 虚拟机实验的时候并没有抛出异常,在真机测试的时候能够抛出异常,qemu 的 BUG
- 操作系统会指定应用程序用的 DS,因此破坏行为会发生异常,那么如果忽略操作系统指定的 DS,而是用汇编语言将操作系统用的段地址存入 DS 的话,就又可以干坏事了
[INSTRSET "i486p"]
[BITS 32]
MOV EAX,1*8 ; OS 用的段号
MOV DS,AX ; 将其存入 DS
MOV BYTE [0x102600],0
RETF
- 思路:想个办法使应用程序无法使用操作系统的段地址
- 在段定义的地方,如果将访问权限加上 0x60 的话,就可以将段设置为应用程序用
- 当 CS 地址中的段地址为应用程序用段地址时,CPU 会认为“当前正在运行应用程序”,如果这时存入操作系统的段地址就会产生异常
- 在 TSS 中注册操作系统用的段地址和 ESP
- 使用此方法,启动应用程序的时候需要让“操作系统向应用程序用的段执行 far-CALL”,根据 x86 的规则,不允许操作系统 CALL 应用程序,强行 CALL 会产生异常,JMP 在 x86 中也是不行的
- 使用 RETF 事先将地址 PUSH 到栈中,然后执行 RETF,这样就可以启动应用程序了
- RETF 是当 far-CALL 调用后返回的指令,即使没有被 CALL 调用,也可以使用 RETF,其本质就是从栈中将地址 POP 出来,然后 JMP 到该地址
- 用 RETF 代替 farjmp
_start_app: ; void start_app(int eip, int cs, int esp, int ds, int *tss_esp0)
PUSHAD ; 将 32 位寄存器的值全部保存起来
MOV EAX,[ESP+36] ; 应用程序用 EIP
MOV ECX,[ESP+40] ; 应用程序用 CS
MOV EDX,[ESP+44] ; 应用程序用 DS/SS
MOV EBX,[ESP+48] ; 应用程序用 ESP
MOV EBP,[ESP+52] ; tss.esp0 的地址
MOV [EBP],ESP ; 操作系统用 ESP
MOV [EBP+4],SS ; 保存操作系统用 SS
MOV ES,BX
MOV DS,BX
MOV FS,BX
MOV GS,BX
; 下面调整栈,以免用 RETF 跳转到应用程序
OR ECX,3 ; 将应用程序用段号和 3 进行 OR 运算
OR EBX,3 ; 将应用程序用段号和 3 进行 OR 运算
PUSH EBX ; 应用程序的 SS
PUSH EDX ; 应用程序的 ESP
PUSH ECX ; 应用程序的 CS
PUSH EAX ; 应用程序的 EIP
RETF- 其他相关函数进行对应的更改
- 让 0x40 号中断可以被应用程序调用,中断属性 +0x60

- 保护操作系统 5
- 编写 crack3.asm
[INSTRSET "i486p"] [BITS 32] CLI fin: HLT jmp fin
- 应用程序运行,操作系统会禁止应用程序使用 STI,CLI,HLT 这些指令- 编写 crack4.asm
[INSTRSET "i486p"] [BITS 32] MOV AL,0x34 OUT 043,AL MOV AL,0xff OUT 0x40,AL MOV AL,0xff OUT 0x40,AL ; 上述代码功能与下面代码相当 ; io_out8(PIT_CTRL, 0x34); ; io_out8(PIT_CNT0, 0xff); ; io_out8(PIT_CNT0, 0xff); MOV EDX,4 INT 0x40
- 以应用模式运行时,执行 IN 指令和 OUT 指令都会产生一般保护异常,通过修改 CPU 设置可以允许应用程序使用 IN,OUT 指令,但是会留下 BUG 遭到攻击- 编写 crack5.asm 通过 farjmp 执行操作系统的 io_cli()
; bootpack.map 0x00000ADA : _io_cli ; io_cli 所在的地址 ; crack5.asm [INSTRSET "i486p"] [BITS 32] CALL 2*8:0x00000ADA MOV EDX,4 INT 0x40
- CPU 规定除了设置好的地址以外,禁止应用程序 CALL 其他地址,因此应用程序要调用操作系统指令只能采用 INT 0x40 的方法

- 帮助发现 BUG
- CPU 的异常处理功能,除了可以保护操作系统免遭应用程序的破坏,还可以帮我们在编写应用程序时发现 BUG
- 编写 bug1.c
void api_putchar(); void api_end(); void HariMain() { char a[100]; a[10] = 'A'; api_putchar(a[10]); a[102] = 'B'; api_putchar(a[102]); a[123] = 'C'; api_putchar(a[123]); api_end(); }
- 运行后没有发生异常,本来该有异常
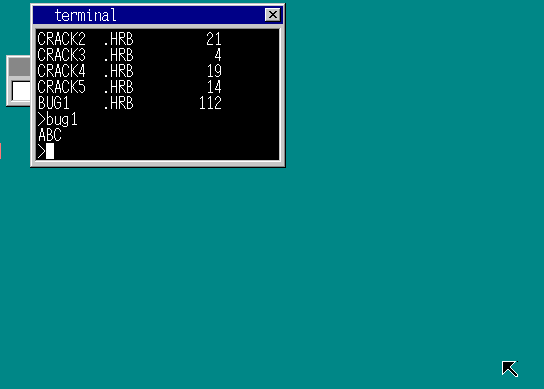
- a 数组保存在栈中,应该产生了栈异常,需要一个函数来处理栈异常
- 栈异常的中断号为 0x0c

| 中断号 | 说明 |
|---|---|
| 0x00 ~ 0x1f | 都是异常使用的中断 |
| 0x00 | 除零异常 |
| 0x06 | 非法指令异常(执行一段 CPU 没有的机器语言指令) |
| 0x0c | 栈异常 |
| 0x20~... | IRQ 中断 |
- 通过调用段异常 0x0c 来抛出异常,inthandler0c
- 添加对异常信息的定位
| 栈元素 | 寄存器 | 解释 |
|---|---|---|
| esp[0] | EDI | esp[0~7] 为_asm_inthandler 中 PUSHAD 的结果 |
| esp[1] | ESI | |
| esp[2] | EBP | |
| esp[4] | EBX | |
| esp[5] | EDX | |
| esp[6] | ECX | |
| esp[7] | EAX | |
| esp[8] | DS | esp[8~9] 为_asm_inthandler 中 PUSH 的结果 |
| esp[9] | ES | |
| esp[10] | 错误编号 | 基本上是 0,显示出来也没什么意思 |
| esp[11] | EIP | |
| esp[12] | CS | esp[10~15] 为异常产生时 CPU 自动 PUSH 的结果 |
| esp[13] | EFLAGS | |
| esp[14] | ESP | 应用程序用 ESP |
| esp[15] | SS | 应用程序用 SS |
- 用 C 语言显示字符串 1
void api_putstr(char *s);
void api_end();
void HariMain()
{
api_putstr("hello world");
api_end();
}- 运行却没有显示任何字符
-
现将 cmd_app() 中的二进制文件执行的 JMP 0x1b 删除,因为无法执行 RETF 了
- 在 hrb_api() 中加入应用程序显示字符串 ebx 寄存器数据显示功能
- bim2hrb 认为"hello, world"存放在显示的这个地址当中
- bim2hrb 生成的.hrb 文件其实是由两部分组成
- 代码部分
- 数据部分
-
bim2hrb 生成的 .hrb 文件开头 36 字节存放的信息
| 地址(DWORD) | 信息 |
|---|---|
| 0x0000 | 请求操作系统为应用程序准备的数据段的大小 |
| 0x0004 | "Hari"(.hrb 文件的标记) |
| 0x0008 | 数据段内预备空间的大小 |
| 0x000c | ESP 初始值 & 数据部分传送目的地址 |
| 0x0010 | hrb 文件内数据部分的大小 |
| 0x0014 | hrb 文件内数据部分从哪里开始 |
| 0x0018 | 0xe9000000 |
| 0x001c | 应用程序运行入口地址 - 0x20 |
| 0x0020 | malloc 空间的起始地址 |
- 根据可执行文件内容修改 terminal.c
// 启动应用
int cmd_app(struct TERM *term, int *fat, char *cmdline)
{
int segsiz, datsiz, esp, dathrb;
struct MEMMAN *memman = (struct MEMMAN *) MEMMAN_ADDR;
struct FILEINFO *finfo;
struct SEGMENT_DESCRIPTOR *gdt = (struct SEGMENT_DESCRIPTOR *) ADR_GDT;
char name[18], *p, *q;
struct TASK *task = task_now();
int i;
for (i = 0; i < 13; i++) {// 根据命令生成文件名
if (cmdline[i] <= ' ') break;
name[i] = cmdline[i];
}
name[i] = 0; // 将文件名后置为 0
finfo = file_search(name, (struct FILEINFO *) (ADR_DISKIMG + 0x002600), 224);
if (finfo == 0 && name[i - 1] != '.') {// 找不到文件通过加上文件后缀 '.hrb' 查找
name[i] = '.';
name[i + 1] = 'H';
name[i + 2] = 'R';
name[i + 3] = 'B';
name[i + 4] = 0;
finfo = file_search(name, (struct FILEINFO *) (ADR_DISKIMG + 0x002600), 224);
}
if (finfo != 0) {// 找到文件
p = (char *) memman_alloc_4k(memman, finfo->size);
*((int *) 0xfe8) = (int) p;
file_loadfile(finfo->clustno, finfo->size, p, fat, (char *) (ADR_DISKIMG + 0x003e00));
// 如果文件大于 36 字节,那么就是 C 语言写的应用程序
if (finfo->size >= 36 && strncmp(p + 4, "Hari", 4) == 0 && *p == 0x00) {
segsiz = *((int *) (p + 0x0000));
esp = *((int *) (p + 0x000c));
datsiz = *((int *) (p + 0x0010));
dathrb = *((int *) (p + 0x0014));
q = (char *) memman_alloc_4k(memman, segsiz);
*((int *) 0xfe8) = (int) q;
set_segmdesc(gdt + 1003, finfo->size - 1, (int) p, AR_CODE32_ER + 0x60);
set_segmdesc(gdt + 1004, segsiz - 1, (int) q, AR_DATA32_RW + 0x60);
for (i = 0; i < datsiz; i++) q[esp + i] = p[dathrb + i];
start_app(0x1b, 1003 * 8, esp, 1004 * 8, &(task->tss.esp0));
memman_free_4k(memman, (int) q, segsiz);
}
else term_putstr(term, ".hrb file format error.");
memman_free_4k(memman, (int) p, finfo->size);
term_newline(term);
return 1;
}
return 0;
}- 文件中找不到"Hari"则报错。
- 数据段的大小根据.hrb 文件中指定的值进行分配
- 将.hrb 文件中的数据部分先复制到数据段后再启动程序
- 根据 hello4.c 写了一个汇编语言的 hello5.asm

一般操作系统会在可执行文件的头地址加上"Hari"这样的标记,Windows 的.exe 文件开头两个字节内容就是"MZ",这里将可执行文件标记放在第四个字节开始
因为如果其他不是可执行的文件可能带有相同的字符,被误认为是可执行文件,虽然可以通过扩展名区分,一般情况下不会出错
但是如果扩展名可靠的话,就没必要加这样的标记了,就是因为扩展名有时候会出错,所以特地加了 4 个字节的标记,提高了安全性
- 显示窗口
- 写一个显示窗口的 API
| 寄存器 | 存放内容 |
|---|---|
| EDX | 5 |
| EBX | 窗口缓冲区 |
| ESI | 窗口 X 轴大小(窗口宽度) |
| EDI | 窗口 Y 轴大小(窗口高度) |
| EAX | 透明色 |
| ECX | 窗口名称 |
- 返回值:EAX= 用于操作窗口的句柄(用于刷新窗口等操作)
; a_nask.asm
_api_openwin: ; int api_openwin(char *buf, int sxize, int yxize, int col_inv, char *title)
PUSH EDI
PUSH ESI
PUSH EBX
MOV EDX,5
MOV EBX,[ESP+16] ; buf
MOV ESI,[ESP+20] ; sxize
MOV EDI,[ESP+24] ; yxize
MOV EAX,[ESP+28] ; col_inv
MOV ECX,[ESP+32] ; title
INT 0x40
POP EBX
POP ESI
POP EDI
RET- 编写 C 语言窗口应用程序
int api_openwin(char *buf, int sxize, int yxize, int col_inv, char *title);
void api_end();
char buf[150 * 50];
void HariMain()
{
int win;
win = api_openwin(buf, 150, 50, -1, "Hello");
api_end();
}- 在 bootpack.c 中将层级管理器的地址存入 0x0fe4 地址然后在 api_hrb() 中调用进行窗口的初始化和层级的设置操作
case 5:
sht = sheet_alloc(shtctl);
sheet_setbuf(sht, (unsigned char *) ebx + ds_base, esi, edi, eax);
make_window8((unsigned char *) ebx + ds_base, esi, edi, (char *) ecx + ds_base, 0);
sheet_slide(sht, 100, 50);
sheet_updown(sht, 3); // 背景层高度位于 task_a 之上
reg[7] = (int) sht;
break;
- 窗口显示字符和方块
- 显示字符 API
| 寄存器 | 存放内容 |
|---|---|
| EDX | 6 |
| EBX | 窗口句柄 |
| ESI | 显示位置的 X 坐标 |
| EDI | 显示位置的 Y 坐标 |
| EAX | 色号 |
| ECX | 字符串长度 |
| EBP | 字符串 |
- 描绘方块 API
| 寄存器 | 存放内容 |
|---|---|
| EDX | 7 |
| EBX | 窗口句柄 |
| EAX | X0 |
| ECX | Y0 |
| ESI | X1 |
| EDI | Y1 |
| EBP | 色号 |
- 操作系统修改
case 6:
sht = (struct SHEET *) ebx;
putfonts8_str(sht->buf, sht->bxsize, esi, edi, eax, (char *) ebp + ds_base);
sheet_refresh(sht, esi, edi, esi + ecx * 8, edi + 16);
break;
case 7:
sht = (struct SHEET *) ebx;
boxfill8(sht->buf, sht->bxsize, ebp, eax, ecx, esi, edi);
sheet_refresh(sht, eax, ecx, esi + 1, edi + 1);
break;- 根据 API 需求写出汇编函数

- winhelo2.c 有 7.6KB 这么大,只是实现了一个窗口显示功能而已,用二进制编辑器查看,里面有很多的空地址,都是 char buf[150 * 50]
- 相当于插入了 150*50=7500 个字节的"00",和汇编语言的 RESB 7500 等效,去掉这句,可执行文件就可以小很多
- 编写一个 api_malloc() 函数
- memman 初始化
| 寄存器 | 存放内容 |
|---|---|
| EDX | 8 |
| EBX | memman 的地址 |
| EAX | memman 所管理的内存空间的起始地址 |
| ECX | memman 所管理的内存空间的字节数 |
- malloc
| 寄存器 | 存放内容 |
|---|---|
| EDX | 9 |
| EBX | memman 的地址 |
| ECX | 需要请求的字节数 |
| EAX | 分配到的内存空间的地址 |
- free
| 寄存器 | 存放内容 |
|---|---|
| EDX | 10 |
| EBX | memman 的地址 |
| EAX | 需要释放的内存空间地址 |
| ECX | 需要释放的字节数 |
- 修改 terminal.c
- 修改后只占用 387 字节就可以创建一个窗口了

- 画点 API 函数
| 寄存器 | 存放内容 |
|---|---|
| EDX | 11 |
| EBX | 窗口句柄 |
| ESI | 显示位置的 X 坐标 |
| EDI | 显示位置的 Y 坐标 |
| EAX | 色号 |
- 修改 termnial.c 的 hrb_api()
case 11:
sht = (struct SHEET *) ebx;
sht->buf[sht->bxsize * edi + esi] = eax;
sheet_refresh(sht, esi, edi, esi + 1, edi + 1);
break;- 创建 star1.c
int api_openwin(char *buf, int xsiz, int ysiz, int col_inv, char *title);
void api_boxfilwin(int win, int x0, int y0, int x1, int y1, int col);
void api_initmalloc();
char *api_malloc(int size);
void api_point(int win, int x, int y, int col);
void api_end();
int rand(void);// 产生 0~32767 之间的随机数
void HariMain()
{
char *buf;
int win, i, x, y;
api_initmalloc();
buf = api_malloc(150 * 100);
win = api_openwin(buf, 150, 100, -1, "stars");
api_boxfilwin(win, 6, 26, 143, 93, 0);
for (i = 0; i < 50; i++) {
x = (rand() % 137) + 6;
y = (rand() % 64) + 26;
api_point(win, x, y, 3/*黄色*/);
}
api_end();
}
- 每次调用 api_point() 的时候,窗口都会刷新一次,太浪费性能,应该让画好之后,最后刷新一次窗口
- 在绘图命令中添加一个不自动刷新的选项,再编写一个只用来刷新窗口的 API
- 思路:在计算 sht 的地方,将 ebx 和 0xfffffffe 做了一个 AND 运算,然后判断是否需要刷新,如果 ebx 最低一个比特为 0,则刷新窗口
| 寄存器 | 存放内容 |
|---|---|
| EDX | 12 |
| EBX | 窗口句柄 |
| EAX | x0 |
| ECX | y0 |
| ESI | x1 |
| EDI | y1 |
- 其他代码进行相应修改
- 通过 api_point() 实现描绘直线功能
for (i = 0, i < len, i++)
{
api_point(win, x, y, col);
x += dx;
y += dy;
}| 寄存器 | 存放内容 |
|---|---|
| EDX | 13 |
| EBX | 窗口句柄 |
| EAX | x0 |
| ECX | y0 |
| ESI | x1 |
| EDI | y1 |
| EBP | 色号 |

- 写一个关闭窗口的 API
| 寄存器 | 存放内容 |
|---|---|
| EDX | 14 |
| EBX | 窗口句柄 |
- 写一个键盘输入 API
- 在按下终止键之后再结束运行
| 寄存器 | 存放内容 |
|---|---|
| EDX | 15 |
| EAX | 0 没有键盘输入时返回 -1,不休眠 |
| 1 休眠直到发生键盘输入 1 | |
| EAX | 输入字符编码 |
- 程序收到回车键后关闭窗口
int api_openwin(char *buf, int xsiz, int ysiz, int col_inv, char *title);
void api_boxfilwin(int win, int x0, int y0, int x1, int y1, int col);
void api_initmalloc();
char *api_malloc(int size);
void api_point(int win, int x, int y, int col);
void api_linewin(int win, int x0, int y0, int x1, int y1, int col);
void api_refreshwin(int win, int x0, int y0, int x1, int y1);
int api_getkey(int mode);
void api_closewin(int win);
void api_end();
void HariMain()
{
char *buf;
int win ,i;
api_initmalloc();
buf = api_malloc(160 * 100);
win = api_openwin(buf, 160, 100, -1, "lines");
for (i = 0; i < 8; i++) {
api_linewin(win + 1, 8, 26, 77, i * 9 + 26, i);
api_linewin(win + 1, 88, 26, i * 9 + 88, 89, i);
}
api_refreshwin(win, 6, 26, 154, 90);
for (;;) {
if (api_getkey(1) == 0x0a) {
break;
}
}
api_closewin(win);
api_end();
}
- 用键盘输入来消遣一下
- 编写了一个小人走路游戏,walk.hrb
- 强制结束并关闭窗口
- 在运行 walk.hrb 和 lines.hrb 时,如果不按回车键结束,而是按 Ctrl+c 的话,窗口会残留在画面上,也不奇怪,因为没有做处理
- 思路:在 struct SHEET 中添加一个用来存放 task 的成员,当应用程序结束时,查询所有图层,如果图层的 task 为要结束的应用程序任务,则关闭该图层
- 这样不仅起作用于强制结束任务时,就算应用程序没有写调用关闭窗口的代码,系统也会关闭他,就可以不用调关闭窗口的 API 了

-
窗口切换
-
窗口移动
-
鼠标关闭窗口
-
将输入切换到应用程序窗口
- 把 key_to 改为 key_win(输入指向的程序窗口)
在 SHEET 结构体中的 TASK 成员判断数据发送对象的 FIFO 因此在 sht_term->task 中也加入了 TASK 结构的地址,这样的话就无法判断窗口是不是由应用程序生成的 需要通过 SHEET 结构中的 flags 成员进行判断(以 0x10 比特位进行区分)此外,只有命令行窗口需要控制光标的 ON/OFF 应用程序窗口不需要,这一区别也是通过 flags 来进行判断的(0x20 比特位进行区分)
-
鼠标切换输入窗口

-
定时器 API
- 让应用程序也能使用定时器进行一系列操作
-
获取定时器 timer_alloc
| 寄存器 | 存放内容 |
|---|---|
| EDX | 16 |
| EAX | 定时器句柄 |
- 设置定时器的发送数据 timer_init
| 寄存器 | 存放内容 |
|---|---|
| EDX | 17 |
| EBX | 定时器句柄 |
| EAX | 数据 |
- 定时器时间设定 timer_settime
| 寄存器 | 存放内容 |
|---|---|
| EDX | 18 |
| EBX | 定时器句柄 |
| EAX | 时间 |
- 释放定时器 timer_free
| 寄存器 | 存放内容 |
|---|---|
| EDX | 19 |
| EBX | 定时器句柄 |
- 在 a_nask.asm 中写对应 API
- 创建一个计时的应用 noodle.c
#include <stdio.h>
int api_openwin(char *buf, int xsiz, int ysiz, int col_inv, char *title);
void api_boxfilwin(int win, int x0, int y0, int x1, int y1, int col);
void api_initmalloc();
char *api_malloc(int size);
void api_point(int win, int x, int y, int col);
void api_refreshwin(int win, int x0, int y0, int x1, int y1);
void api_putstrwin(int win, int x, int y, int col, int len, char *str);
int api_getkey(int mode);
int api_alloctimer();
void api_inittimer(int timer, int data);
void api_settimer(int timer, int time);
void api_closewin(int win);
void api_end();
void HariMain()
{
char *buf, s[12] = {0};
int win, timer, sec = 0, min = 0, hour = 0;
api_initmalloc();
buf = api_malloc(150 * 50);
win = api_openwin(buf, 150, 50, -1, "Noodle");
timer = api_alloctimer();
api_inittimer(timer, 128);
for (;;) {
sprintf(s, "%5d:%02d:%02d", hour, min, sec);
api_boxfilwin(win, 28, 27, 115, 41, 7);
api_putstrwin(win, 28, 27, 0, 11, s);
api_settimer(timer, 100);
if (api_getkey(1) != 128) break;
sec++;
if (sec == 60) {
sec = 0;
min++;
if (min == 60) {
min = 0;
hour++;
}
}
}
api_end();
}
- 当定时器结束后会发送超时的数据,如果这时应用程序已经结束了,定时器的数据就会被发送到终端,终端就会显示一个字符
- 编写一个取消定时器的函数,达到效果后结束定时器
int timer_cancel(struct TIMER *timer)
{
int e;
struct TIMER *t;
e = io_load_eflags();
io_cli();// 设置过程中禁止改变定时器状态
if (timer->flags == TIMER_FLAGS_ACTING) {// 是否需要取消
// 第一个定时器的处理
if (timer == timerctl.t0) {
// 如果是哨兵就跳过
t = timer->next;
timerctl.t0 = t;
timerctl.next = t->timeout;
} else {
// 非第一个定时器的取消处理
// 找到 timer 前一个定时器
t = timerctl.t0;
for (;;) {
if (t->next == timer) break;
t = t->next;
}
// 将之前"timer 的下一个"指向"tiemr 的下一个"
t->next = timer->next;
}
timer->flags = TIMER_FLAGS_ALLOC;
io_store_eflags(e);
return 1; // 取消处理成功
}
io_store_eflags(e);
return 0;// 不需要取消处理
}- 在定时器结构体里添加 flags2 是否为应用程序定时器的标志
- 其他关联代码进行相应修改
- 在 hrb_api 中对请求定时器的应用将定时器的应用标志置为 1
reg[7] = (int) timer_alloc();
((struct TIMER *) reg[7])->flags2 = 1; // 允许自动取消- 在应用程序结束后自动结束不需要的定时器
void timer_cancelall(struct FIFO32 *fifo)
{
int e, i;
struct TIMER *t;
e = io_load_eflags();
io_cli();
for (i = 0; i < MAX_TIMER; i++) {
t = &timerctl.timers0[i];
// 当前定时器是否正在已经分配,是否为应用程序的定时器,其缓冲区是否是目标定时器
if (t->flags != 0 && t->flags2 != 0 && t->fifo == fifo) {
timer_cancel(t);
timer_free(t);
}
}
io_store_eflags(e);
}- 蜂鸣器发声
- 蜂鸣器发声和定时器一样,都是由 PIT 来控制的,而 PIT 位于芯片组中,因此所有型号的电脑都能使用它
- 蜂鸣器发声的控制
| 寄存器 | 存放内容 | 代码 |
|---|---|---|
| 高音操作 | - | - |
| AL | 0xb6 | OUT(0x43, AL) |
| AL | 设定值的低位 8bit | OUT(0x42,AL) |
| AL | 设定值的高位 8bit | OUT(0x42,AL) |
设定值为 0 的时候当做 65536 来处理,发声的音高为时钟除以设定值
也就是说设定值为 1000 时发出 1.19318KHz 的声音
设定值为 10000 时相当于 119.318Hz,因此设定在 2712 即可发出约 440Hz 的声音
440Hz 为** C 之上的 A 音,即国际标准音。
-
蜂鸣器 ON/OFF
- 使用 I/O 端口 0x61 控制
- ON: IN(AL, 0x61); AL |= 0x03; AL &= 0x0f; OUT(0x61,AL);
- OFF: IN(AL, 0x61); AL &= 0xd; OUT(0x61,AL);
- PIT 时钟的频率恒定为 1.19318MHz
-
蜂鸣器发声 API
| 寄存器 | 存放内容 |
|---|---|
| EDX | 20 |
| DAX | 声音频率 (mHz) |
if (eax == 0) {
i = io_in8(0x61);
io_out8(0x61, i & 0x0d);
} else {
i = 1193180000 / eax;
io_out8(0x43, 0xb6);
io_out8(0x42, i & 0xff);
io_out8(0x42, i >> 8);
i = io_in8(0x61);
io_out8(0x61, (i | 0x03) & 0x0f);
}- 增加更多的颜色 1
- 增加更多的颜色 2
- 通过像素混合的方式显示更多的颜色

- 删除了 task_a
- 任务结构体添加了是否是终端的标志
- 不同终端用不同的内存段
- 多应用开启

- 提高窗口移动速度
- 思路:在 sheet_refreshmap 中,对窗口的每一个像素点判断是否为透明色然后刷新太慢,改为两个方法,刷新非透明窗口的和透明窗口的
if (sht->col_inv == -1) {
// 无透明图层专用的高速版本
for (by = by0; by < by1; by++) {
vy = sht->vy0 + by;
for (bx = bx0; bx < bx1; bx++) {
vx = sht->vx0 + bx;
vmap[vy * ctl->xsize + vx] = sid;
}
}
} else {
// 有透明图层用的普通版
for (by = by0; by < by1; by++) {
vy = sht->vy0 + by;
for (bx = bx0; bx < bx1; bx++) {
vx = sht->vx0 + bx;
if (buf[by * sht->bxsize + bx] != sht->col_inv) vmap[vy * ctl->xsize + vx] = sid;
}
}
}- 再次进行窗口移速加快
vmap[vy * ctl->xsize + vx] = sid;
// 在内存中的某个地址写入 sid 的值
// 位于 for 循环中,而且这个地址的后面之后的地址也要写入 sid-
这样就有更好的方法
- 在汇编语言中,如果用 16 位寄存器代替 8 位寄存器来执行 MOV 指令的话,相邻的地址中也会同时写入数据
- 如果用 32 位寄存器,一条指令就可以同时向 4 个相邻的地址写入值
- 只要指定地址是 4 的整数倍,执行速度就和 1 个字节是相同的,应该能提升到原来的 4 倍
-
当 FIFO 缓冲区中没有数据的时候再进行画面刷新,用 new_wx, new_wy 将值保存起来
-
启动时只打开一个命令行窗口
- 按住 shift+alt+enter 打开命令行窗口

- 增加更多的命令行窗口
- 删除 sht_term,直接向 key_win 赋值
keywin_off(key_win);
sheet_slide(key_win, 32, 4);
key_win = open_terminal(shtctl, memtotal);
sheet_updown(key_win, shtctl->top);
// 自动将焦点切换到新打开的命令行窗口
keywin_on(key_win);-
关闭终端
- 编写 cmd_exit() 命令,在终端输入 cmd_ext() 的时候将终端的窗口和缓冲区保存在固定的内存地址
- 将内存释放掉,对操作系统的缓冲区发送数据,为 768 + 当前终端的窗口句柄
- 操作系统读取缓冲区的值,释放终端的缓冲区,如果没有任何窗口了,就将聚焦设置到哨兵 task_a 上
- alt + shift + c 关闭终端
- 添加了 x 鼠标关闭终端
-
exec 执行应用
-
修复了中断切换时白色光标停留在未激活终端的现象
-
添加了无终端启动应用程序
-
编写了无终端启动的方法
- 将终端启动中的窗口与终端任务分离为两个方法,并且无终端启动时终端的定时器、字符等都不会启动


-
修复 bug
- 无终端启动应用程序后无法关闭应用,无论是强制关闭还是输入程序指定的按键
- 因为开启应用程序后逻辑是要没有窗口的终端任务进入休眠,这样就无法接收按键指令,也无法执行结束任务的指令,所以就需要唤醒任务
- 之前强制结束没有问题是因为终端会 0.5s 触发中断,对终端的 fifo 缓冲区发送数据就会唤醒终端,并且会有最大 0.5s 的强制结束延迟
-
应用程序运行时关闭命令行窗口
-
应用程序启动后可以关闭终端
- 将终端的层级先隐藏,然后释放
- 通过 hrb_api 发送指令到操作系统,释放关闭终端的层级
-
保护应用程序
- 编写破坏应用程序的病毒
- 因为应用程序之间可以互相访问彼此的内存段,并做出修改,所以可以破坏
[FORMAT "WCOFF"]
[INSTRSET "i486p"]
[BITS 32]
[FILE "crack7.asm"]
GLOBAL _HariMain
[SECTION .text]
_HariMain:
MOV AX,1005*8
MOV DS,AX
CMP DWORD [DS:0x0004],'Hari'
JNE fin ; 不是应用程序,因此不执行任何操作下
MOV ECX,[DS:0x0000] ; 读取该应用程序数据段的大小
MOV AX,2005*8
MOV DS,AX
crackloop: ; 整个用 123 填充
ADD ECX,-1
MOV BYTE [DS:ECX],123
CMP ECX,0
JNE crackloop
fin: ; 结束
MOV EDX,4
INT 0x40| 段号 | 主人 |
|---|---|
| 1003 | task_a 用 |
| 1004 | idle 用 |
| 1005 | 第一个命令行窗口的应用程序代码段 |
| 1006 | 第二个命令行窗口的应用程序代码段 |
-
应用程序之间不能互相访问段,但是 CPU 没有设置,需要自己编写
- 通过 LDT(local segment descriptor label)的设置,让其他任务无法使用该 LDT,就不用担心它们来搞破坏了
- 容量和 GDT 一样,都是 64KB,容纳 8192 个段
- 通过 GDTR 寄存器将 GDT 的内存地址告知 CPU,LDT 的内存地址则是通过在 GDT 中创建 LDT 段来告知 CPU
- 在 GDT 中可以设置多个 LDT(不能同时使用两个以上的 LDT),和 TSS 非常相似
-
在 start_app 指定了段号是 4(=0x8+4) 和 12(=1x8+4),乘 8 的部分和 GDT 是一样的,但不一样的是还加上了 4,这是代表该段号不是 GDT 的段号,而是 LDT 内的段号
- 每个任务都有自己专用的 LDT 段号
start_app(0x1b, 0 * 8 + 4, esp, 1 * 8 + 4, &(task->tss.esp0));
-
优化应用程序大小
- 将 a_nask.obj 的方法拆开成相互独立的文件,但是这样太麻烦
- 创建库
-
整理了 Make 环境
- 写一个输出质数的应用程序,当输出的质数在 10000 以内的时候会因为栈空间不足而运行异常,所以需要写一个自动分配空间的功能
#include <stdio.h>
#include "../apilib.h"
#define MAX 10000
void HariMain()
{
char *flag, s[8];
int i, j;
api_initmalloc();
flag = api_malloc(MAX);
for (i = 2; i < MAX; i++) {
if (flag[i] == 0) {
sprintf(s, "%d ", i);
api_putstr(s);
for (j = i * 2; j < MAX; j += i) {
flag[j] = 1;
}
}
}
api_end();
}; __alloca 会在下述情况下被 c 语言调用(采用 near-CALL 的方式)
; 要执行的操作从栈中分配 EAX 个字节的内存空间(ESP -= EAX; )
; 要遵守的规则不能改变 ECX、EDX、EBX、EBP、ESI、EDI 的值(可以临时改变,但要使用 PUSH 或 POP 复原)
; 错误的 alloca 示例
SUB ESP,EAX
RET
; 这个程序是无法运行的,因为 RET 返回的地址保存在了 ESP 中,而 ESP 的值在这里被改变了
; 于是读取了错误的返回地址
; 错误的 alloca 示例 2
SUB ESP,EAX
JMP DWORD [ESP+EAX] ; 代替 RET
; 这个貌似不错,JMP 的目标地址从 [ESP] 变成了 [ESP+EAX],而 ESP+EAX 的值正好是减法运算之前的 ESP 值
; 不过这样还是有问题,“RET” 指令相当于 “POP EIP”,而 “POP EIP” 实际上又相当于下面两条指令
MOV EIP,[ESP] ; 没有这个指令,用 JMP [ESP] 代替
ADD ESP,4
; 也就是说,刚刚忘记给 ESP 加上 4,因此 ESP 的值就有了误差
; 错误的 alloca 示例 3
SUB ESP,EAX
JMP DWORD [ESP+EAX]
ADD ESP,4
; 这个程序的问题在于 ADD 指令的位置,将 ADD 指令放在了 JMP 指令的后面,所以是不可能被执行的
; 基本正确的 alloca 示例
SUB ESP,EAX
ADD ESP,4
JMP DWORD [ESP+EAX-4] ; 代替 RET
; 最后的版本
ADD EAX,-4
SUB ESP,EAX
JMP DWORD [ESP+EAX] ; 代替 RET
- 将 winhelo 程序也在栈中分配空间
#include "../apilib.h"
void HariMain()
{
int win;
char buf[150 * 50];
win = api_openwin(buf, 150, 50, -1, "Hello");
for (;;) {
if (api_getkey(1) == 0x1c) break;
}
api_end();
}
// Makefile
APP = winhelo
STACK = 8k
MALLOC = 0k
include ../app_make.txt- winhelo 程序从 7764 字节变为 174 字节
- 同时也修改 winhelo2

-
文件操作 API
-
API 功能
- 打开 open
- 文件名
- 返回文件句柄
- 定位 seek
- 定位检索指定文件所在的扇区
- 读取 read
- 指定读取的数据长度以及内存地址
- 文件被传入至内存
- 写入 write
- 指定写入的数据长度以及内存地址
- 内存被传入至文件
- 关闭 close
- 打开 open
-
打开文件
| 寄存器 | 内容 |
|---|---|
| EDX | 21 |
| EBX | 文件名 |
| EAX | 文件句柄(为 0 时表示打开失败) |
- 关闭文件
| 寄存器 | 内容 |
|---|---|
| EDX | 22 |
| EAX | 文件句柄 |
- 文件定位
| 寄存器 | 内容 |
|---|---|
| EDX | 23 |
| EAX | 文件句柄 |
| ECX | 定位模式 |
| =0 | 定位的起点为文件开头 |
| =1 | 定位的起点为当前访问位置 |
| =2 | 定位的起点为文件末尾 |
| EBX | 定位偏移量 |
- 获取文件大小
| 寄存器 | 内容 |
|---|---|
| EDX | 24 |
| EAX | 文件句柄 |
| ECX | 文件大小获取模式 |
| =0 | 普通文件大小 |
| =1 | 当前读取位置从文件开头起算的偏移量 |
| =2 | 当前读取位置从文件末尾起算的偏移量 |
| EAX | 文件大小(操作系统返回) |
- 文件读取
| 寄存器 | 内容 |
|---|---|
| EDX | 25 |
| EAX | 文件句柄 |
| EBX | 缓冲区地址 |
| ECX | 最大读取字节数 |
| EAX | 本次读取到的字节数(由操作系统返回) |
- 将 cat 命令转换为应用程序,而不是内置命令
- 由于 cat.hrb 还只能显示 ipl10.asm 这个文件,需要实现能指定文件名的功能,否则它就无法替代 cat 命令
- 需要获取后面的文件名,编写一个获取命令行的 API
- 获取命令行
| 寄存器 | 内容 |
|---|---|
| EDX | 26 |
| EBX | 存放命令行内容的地址 |
| ECX | 最多可存放多少个字节 |
| EAX | 实际存放了多少个字节(由操作系统返回) |

| 按键 | 功能 |
|---|---|
| TAB | 补全 |
| BACKSPACE | |
| 上下箭头 | 历史命令 |
| PageUp/Down | 终端滚动 |
| 命令 | |
| C-c | |
| C-l | |
| C-p | 上一个命令 |
| C-k | 下一个命令 |
| & | 后台运行程序 |
| pkill | 杀死某个进程 |
| exec | |
| exit |
- 支持 ESC 进入 NORMAL 模式
- 默认 INSERT 模式
- 连续的字母跳转
- v 切换 VISUAL
1. 支持组合快捷键
2. time 软件,计算程序运行时间