在一幅图像中,角点具有以下特征:

根据以上观察,对于给定图像和固定尺寸的邻域窗口,计算窗口平移前后窗口内像素的变化情况,可以用自相关函数度量:
窗口加权函数可以是均值函数或高斯函数。
根据泰勒展开,可得到近似
因此
考虑角点的边界和坐标轴对齐的情况,如下图所示,在平移窗口内,只有上侧和左侧边缘,上边缘(I_y) 很大而 (I_x) 很小,左边缘 (I_x) 很大而 (I_y) 很小,所以矩阵 (M) 可化简为
当角点边界和坐标轴没有对齐时,可对角点进行旋转变换,将其变换到与坐标轴对齐,这种旋转操作可用矩阵的相似对角化来表示,即
其中,
所以我们可以根据M的特征值判断该点是否为角点

在判断角点时,无需具体计算矩阵
其中,
式中,$\text{det}(M)$ 为矩阵
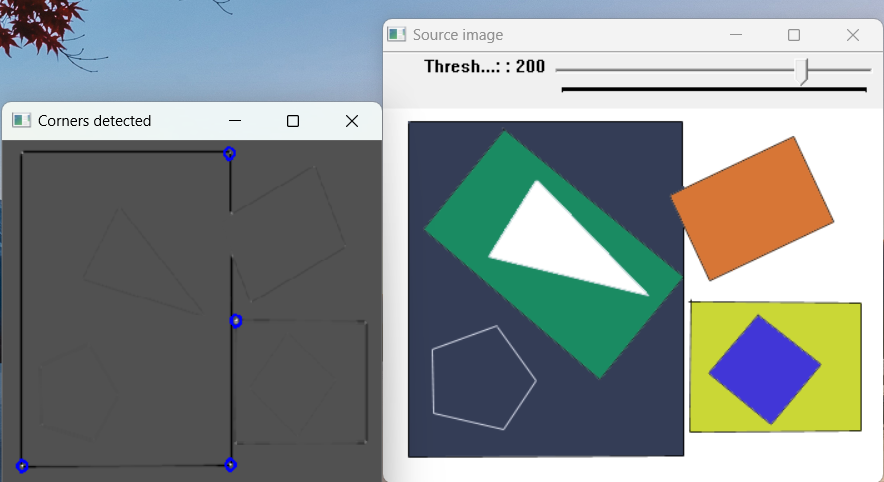
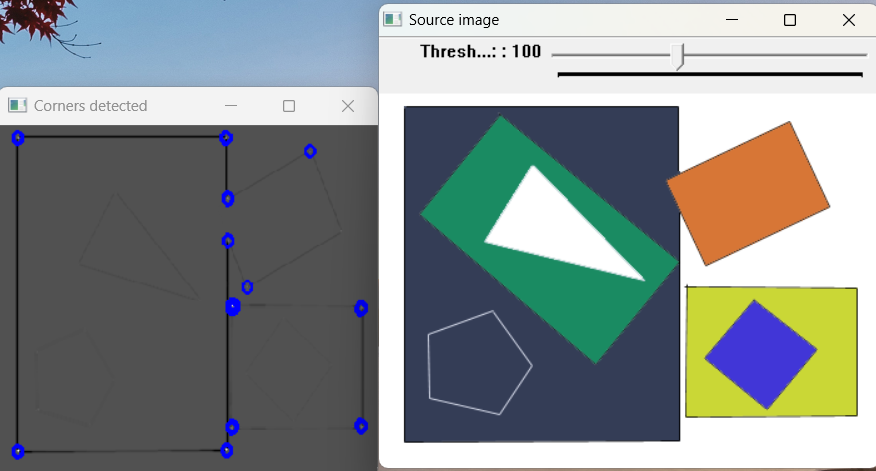
- 调用opencv的cornerHarris函数
void cv::cornerHarris(InputArray src,
OutputArray dst,
int blockSize,
int ksize,
double k,
int borderType = BORDER_DEFAULT
)参数
src: 单通道uint8或float图像dst: 角点检测输出,类型为CV_32FC1,大小与输入图像相同blockSize: 邻域大小ksize: Soble算子孔径参数k: 常数borderType: 像素外推方法
实现
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
using namespace cv;
using namespace std;
/// Global variables
Mat src, src_gray;
int thresh = 200;
int max_thresh = 255;
const char* source_window = "Source image";
const char* corners_window = "Corners detected";
const char* dst_window = "dst image";
/// Function header
void cornerHarris_demo (int, void*);
/** @function main */
int main (int argc, char** argv) {
/// Load source image and convert it to gray
// src = imread ("house.jpg", 1);
src = imread("pic5.png", 1);
cvtColor (src, src_gray, COLOR_BGR2GRAY);
/// Create a window and a trackbar
namedWindow (source_window, WINDOW_AUTOSIZE);
createTrackbar ("Threshold: ", source_window, &thresh, max_thresh, cornerHarris_demo);
imshow (source_window, src);
cornerHarris_demo (0, 0);
waitKey (0);
return (0);
}
/** @function cornerHarris_demo */
void cornerHarris_demo (int, void*) {
Mat dst, dst_norm, dst_norm_scaled;
dst = Mat::zeros (src.size(), CV_32FC1);
/// Detector parameters
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
/// Detecting corners
cornerHarris (src_gray, dst, blockSize, apertureSize, k, BORDER_DEFAULT);
/// Normalizing
normalize (dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
//convertScaleAbs (dst_norm, dst_norm_scaled);
dst_norm_scaled.create(dst.rows, dst.cols, CV_8UC3);
Mat_<Vec3b> m = dst_norm_scaled;
for (int j = 0; j < dst_norm.rows; j++) {
for (int i = 0; i < dst_norm.cols; i++) {
uchar v = dst_norm.at<float>(j, i);
m(j, i) = Vec3b(v, v, v);
}
}
/// Drawing a circle around corners
for (int j = 0; j < dst_norm.rows; j++) {
for (int i = 0; i < dst_norm.cols; i++) {
if ((int)dst_norm.at<float>(j, i) > thresh) {
circle(dst_norm_scaled, Point(i, j), 5, Scalar(255, 0, 0), 2, 8, 0);
}
}
}
/// Showing the result
namedWindow(corners_window, WINDOW_NORMAL);
imshow(corners_window, dst_norm_scaled);
}


-
自定义connorHarris
void my_cornerHarris(const Mat& src, Mat& dst, int blockSize, int apertureSize, double k, int borderType) { // Convert the source image to grayscale if (src.channels() > 1) { cvtColor(src, src, COLOR_BGR2GRAY); } // Calculate the derivatives using Sobel operator Mat dx, dy; Sobel(src, dx, CV_32F, 1, 0, apertureSize, 1, 0, borderType); Sobel(src, dy, CV_32F, 0, 1, apertureSize, 1, 0, borderType); // Calculate the products of derivatives at each pixel Mat dx2 = dx.mul(dx); Mat dy2 = dy.mul(dy); Mat dxy = dx.mul(dy); // Apply Gaussian filter to the products of derivatives // GaussianBlur(dx2, dx2, Size(blockSize, blockSize), 0, 0, borderType); // GaussianBlur(dy2, dy2, Size(blockSize, blockSize), 0, 0, borderType); // GaussianBlur(dxy, dxy, Size(blockSize, blockSize), 0, 0, borderType); //Apply mean filter to the products of derivatives blur(dx2, dx2, Size(blockSize, blockSize), Point(-1, -1), borderType); blur(dy2, dy2, Size(blockSize, blockSize), Point(-1, -1), borderType); blur(dxy, dxy, Size(blockSize, blockSize), Point(-1, -1), borderType); // Calculate the Harris response Mat det = dx2.mul(dy2) - dxy.mul(dxy); Mat trace = dx2 + dy2; dst = det - k * trace.mul(trace); // Normalize the response normalize(dst, dst, 0, 255, NORM_MINMAX, CV_32F); // Convert the response to 8-bit image dst.convertTo(dst, CV_8U); }
-
-



#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
// #include <opencv2/xfeatures2d/nonfree.hpp>
// #include <opencv2/xfeatures2d.hpp>
#include <vector>
using namespace std;
using namespace cv;
int main(int argc, char** argv)
{
// Load the two images.
// 'query' and 'train' are the notation used by the parameters in the 'match' function.
// It seems backwards from how I'm applying it--the first image is where I've
// isolated the object I'm looking for, and the second is the image I want to locate that
// object in.
Mat queryImg = imread("D:\\OneDrive - mails.tsinghua.edu.cn\\Learn\\Digital Image Process\\Experiments\\Experiment-5\\l2.jpg");
Mat trainImg = imread("D:\\OneDrive - mails.tsinghua.edu.cn\\Learn\\Digital Image Process\\Experiments\\Experiment-5\\r2.jpg");
// Verify the images loaded successfully.
if (queryImg.empty() || trainImg.empty())
{
printf("Can't read one of the images\n");
return -1;
}
// Detect keypoints in both images.
Ptr<SIFT> detector = SIFT::create(50);
vector<KeyPoint> queryKeypoints, trainKeypoints;
detector->detect(queryImg, queryKeypoints);
detector->detect(trainImg, trainKeypoints);
// Print how many keypoints were found in each image.
printf("Found %d and %d keypoints.\n", queryKeypoints.size(), trainKeypoints.size());
// Compute the SIFT feature descriptors for the keypoints.
// Multiple features can be extracted from a single keypoint, so the result is a
// matrix where row 'i' is the list of features for keypoint 'i'.
Ptr<SiftDescriptorExtractor> extractor = SiftDescriptorExtractor::create();
Mat queryDescriptors, trainDescriptors;
extractor->compute(queryImg, queryKeypoints, queryDescriptors);
extractor->compute(trainImg, trainKeypoints, trainDescriptors);
// Print some statistics on the matrices returned.
Size size = queryDescriptors.size();
printf("Query descriptors height: %d, width: %d, area: %d, non-zero: %d\n",
size.height, size.width, size.area(), countNonZero(queryDescriptors));
size = trainDescriptors.size();
printf("Train descriptors height: %d, width: %d, area: %d, non-zero: %d\n",
size.height, size.width, size.area(), countNonZero(trainDescriptors));
// For each of the descriptors in 'queryDescriptors', find the closest
// matching descriptor in 'trainDescriptors' (performs an exhaustive search).
// This seems to only return as many matches as there are keypoints. For each
// keypoint in 'query', it must return the descriptor which most closesly matches a
// a descriptor in 'train'?
BFMatcher matcher(NORM_L2);
vector<DMatch> matches;
matcher.match(queryDescriptors, trainDescriptors, matches);
// Print the number of matches.
printf("Found %d matches.\n", matches.size());
// Draw the results. Displays the images side by side, with colored circles at
// each keypoint, and lines connecting the matching keypoints between the two
// images.
namedWindow("matches", 1);
Mat img_matches;
drawMatches(queryImg, queryKeypoints, trainImg, trainKeypoints, matches, img_matches);
imshow("matches", img_matches);
waitKey(0);
return 0;
}k = 50

k = 30

k = 10
