- This is a rllab environment for learning human driver models with imitation learning
- This repository does not contain a gail / infogail / hgail implementation
- The reason ngsim_env does not contain the GAIL algorithm implementation is to enable the codebase to be more modular. This design decision enables ngsim_env to be used as an environment in which any imitation learning algorithm can be tested. Similarly, this design decision enables the GAIL algorithm to be a separate module that can be tested in any environment be that ngsim_env or otherwise. The installation process below gets the GAIL implementation from sisl/hgail
- It also does not contain the human driver data you need for the environment to work. The installation process below gets the data from sisl/NGSIM.jl.
- Figure below shows a diagram of the repositories ngsim_env depends on:
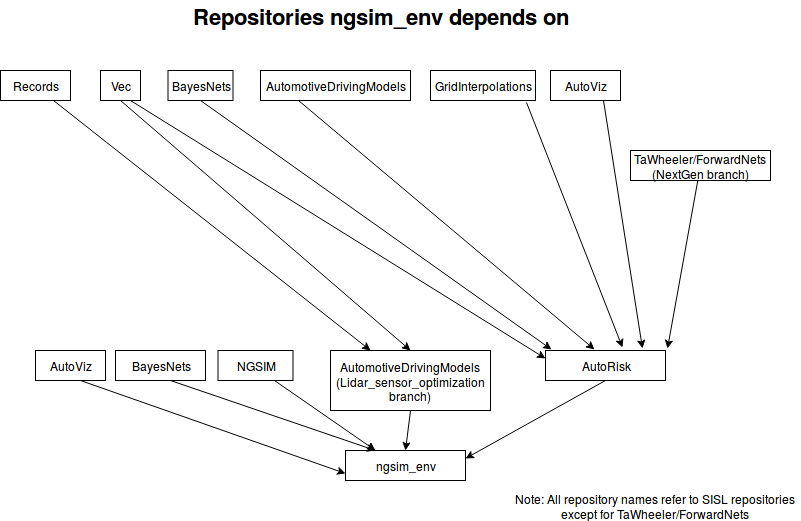

Step-by-step install instructions are at docs/install_env_gail_full.md
- Navigate to ngsim_env/scripts/imitation
- Train a policy, this involves running imitate.py
python imitate.py --exp_name NGSIM-gail --n_itr 1000 --policy_recurrent True- Run the trained policy by using it to drive a car (this creates trajectories on all NGSIM sections using the trained policy). The training step was called imitate. This step is called validate.
python validate.py --n_proc 5 --exp_dir ../../data/experiments/NGSIM-gail/ --params_filename itr_1000.npz --random_seed 42- Visualize the results: Open up a jupyter notebook and use the visualize*.ipynb files.
- the visualize family of ipynb's have headers at the top of each file describing what it does.
- visualize.ipynb is for extracting the Root Mean Square Error
- visualize_trajectories.ipynb creates videos such as the one shown below in the demo section
- visualize_emergent.ipynb calculates the emergent metrics such as offroad duration and collision rate
- see
docs/training.md
- See README files individual directories for details, but a high-level description is:
- The python code uses pyjulia to instantiate a Julia interpreter, see the
pythondirectory for details - The driving environment is then built in Julia, see the
juliadirectory for details - Each time the environment is stepped forward, execution passes from python to julia, updating the environment


If you found this library useful in your research, please consider citing our paper and/or paper:
@inproceedings{bhattacharyya2018multi,
title={Multi-agent imitation learning for driving simulation},
author={Bhattacharyya, Raunak P and Phillips, Derek J and Wulfe, Blake and Morton, Jeremy and Kuefler, Alex and Kochenderfer, Mykel J},
booktitle={2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={1534--1539},
year={2018},
organization={IEEE}
}
@article{bhattacharyya2019simulating,
title={Simulating Emergent Properties of Human Driving Behavior Using Multi-Agent Reward Augmented Imitation Learning},
author={Bhattacharyya, Raunak P and Phillips, Derek J and Liu, Changliu and Gupta, Jayesh K and Driggs-Campbell, Katherine and Kochenderfer, Mykel J},
journal={arXiv preprint arXiv:1903.05766},
year={2019}
}