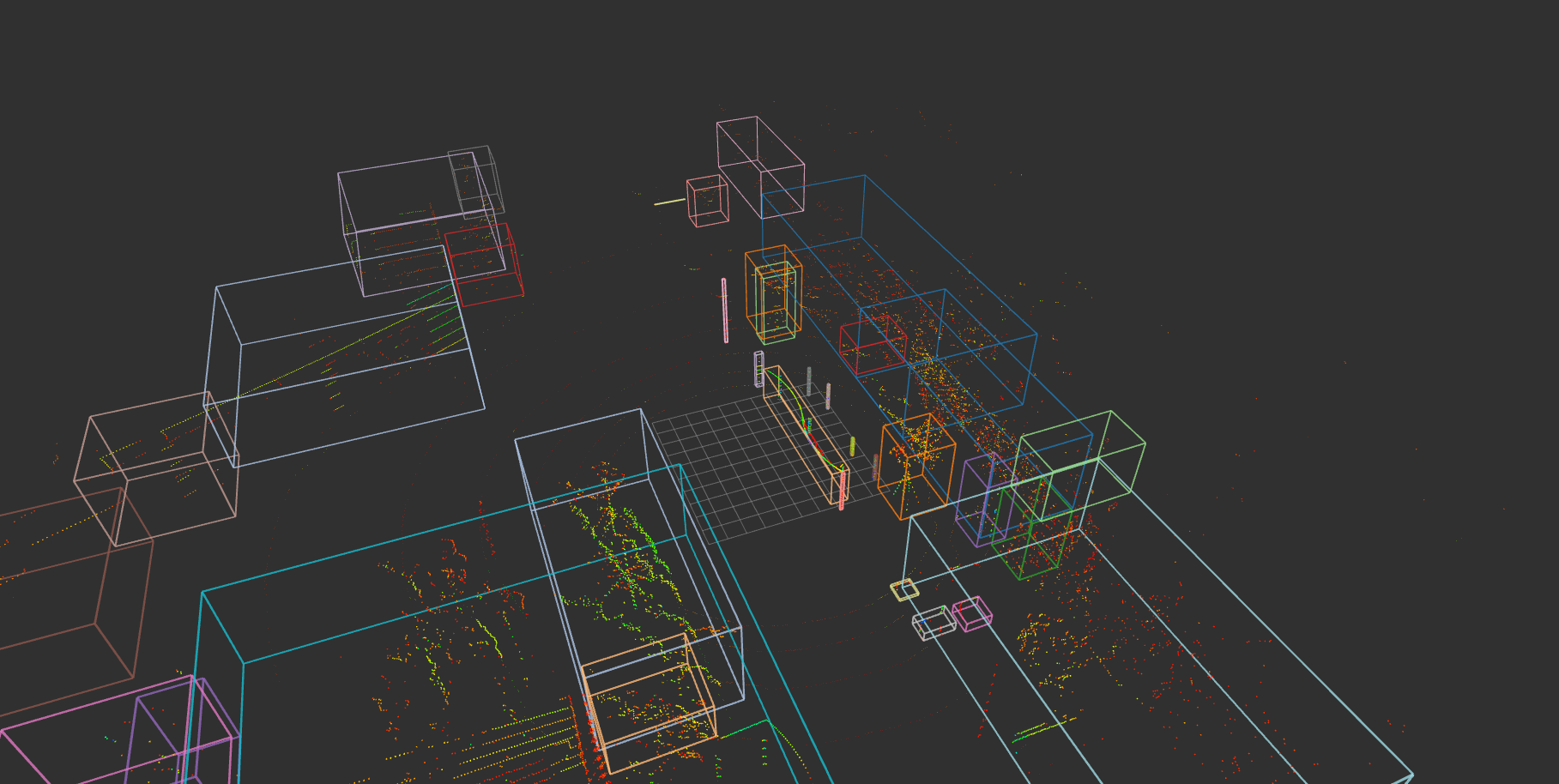
This is a ROS package fro 3D lidar Point cloud segmentation. It is recommended that you use this package with another plane_fit_ground_filter.
- ROS
- PCL 1.7
- jsk_rvize_plugins
$ sudo apt-get install ros-kinetic-jsk-rviz-plugins
There are two launch file, the euclidean_cluster.launch only run the node of euclidean_cluster.
if you use the plane_fit_ground_filter package, you can use euclidean_cluster_output.launch. You need to modify the euclidean_cluster_output.launch file of the line 53 to you own path.