
Collision detection is essential for realistic physical interactions in video games and computer animation. In order to ensure real-time interactivity with the player/user, video game and 3D modeling software developers usually approximate the 3D models composing the scene (e.g. animated characters, static objects...) by a set of simple convex shapes such as ellipsoids, capsules or convex-hulls. In practice, these simple shapes provide poor approximations for concave surfaces and generate false collision detection.
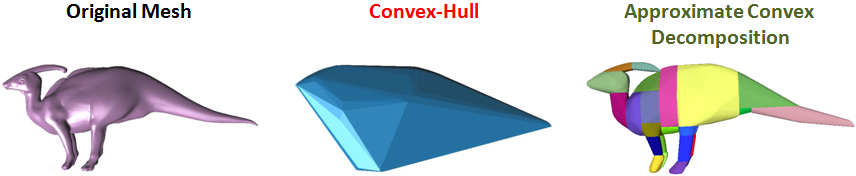
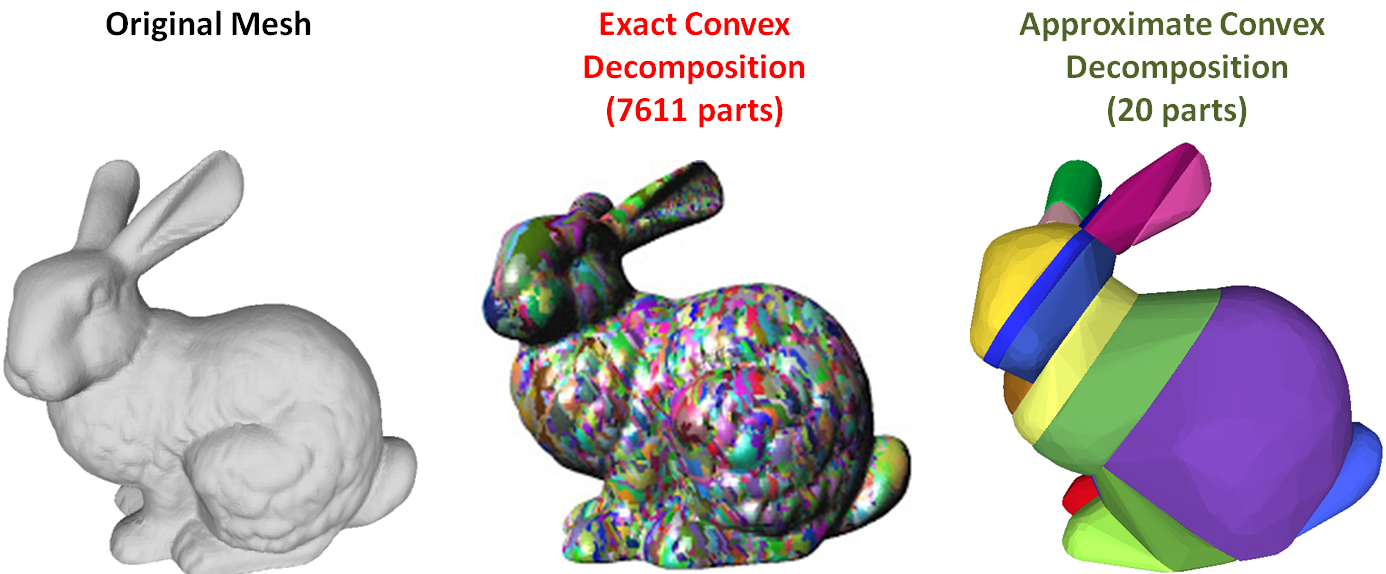
A second approach consists in computing an exact convex decomposition of a surface S, which consists in partitioning it into a minimal set of convex sub-surfaces. Exact convex decomposition algorithms are NP-hard and non-practical since they produce a high number of clusters. To overcome these limitations, the exact convexity constraint is relaxed and an approximate convex decomposition of S is instead computed. Here, the goal is to determine a partition of the mesh triangles with a minimal number of clusters, while ensuring that each cluster has a concavity lower than a user defined threshold.
A 2.8x port of the blender addon tool can be found here: https://github.com/andyp123/blender_vhacd, please go there and follow the instructions provided in that repository. The in-repo included 2.7x version of the tool will not function for Blender 2.8+.
- Clone this Github repository
- You may either rebuild the binaries for your machine or use the provided binaries. Here we will assume that you will use the provided binaries in the v-hacd/bin directory.
- Copy the Python script in v-hacd/add-ons/blender/object_vhacd.py to your Blender addons directory. For Blender 2.78 this directory will be "Blender Foundation/Blender/2.78/scripts/addons/". You're at the right place if you see other scripts prefixed with object_.
- The addon must be enabled before use. After copying the script to the addons directory, open Blender and navigate to File > User Preferences > Add-ons. Object: V-HACD will be featured on the list. Check its mark to enable the addon and save user settings.
- After you have enabled the addon, the V-HACD menu will appear in the object menu when an object is selected.
- Go to this menu and select a preset (or leave the path presets).
- Select your VHACD path by selecting the "Open File" button next to the VHACD path, which should currently be blank.
- Navigate to the directory in which you cloned this repository and find the appropriate executable in the bin folder for your operating systme.
- If you have a video card that supports OpenCL, this will be bin.
- If you don't have a video card or your video card does not support OpenCL, the appropriate executable for you will be bin-no-ocl (no OpenCL).
- Select the V-HACD button at the button of the panel. You will be presented with some options.
- Modify the options as desired and select "OK."
- Note that the processing may take some time. Increasing voxel resolution will particularly increase runtime.
| Parameter name | Description | Default value | Range |
|---|---|---|---|
| resolution | maximum number of voxels generated during the voxelization stage | 100,000 | 10,000-64,000,000 |
| depth | maximum number of clipping stages. During each split stage, all the model parts (with a concavity higher than the user defined threshold) are clipped according the "best" clipping plane | 20 | 1-32 |
| concavity | maximum concavity | 0.0025 | 0.0-1.0 |
| planeDownsampling | controls the granularity of the search for the "best" clipping plane | 4 | 1-16 |
| convexhullDownsampling | controls the precision of the convex-hull generation process during the clipping plane selection stage | 4 | 1-16 |
| alpha | controls the bias toward clipping along symmetry planes | 0.05 | 0.0-1.0 |
| beta | controls the bias toward clipping along revolution axes | 0.05 | 0.0-1.0 |
| gamma | maximum allowed concavity during the merge stage | 0.00125 | 0.0-1.0 |
| pca | enable/disable normalizing the mesh before applying the convex decomposition | 0 | 0-1 |
| mode | 0: voxel-based approximate convex decomposition, 1: tetrahedron-based approximate convex decomposition | 0 | 0-1 |
| maxNumVerticesPerCH | controls the maximum number of triangles per convex-hull | 64 | 4-1024 |
| minVolumePerCH | controls the adaptive sampling of the generated convex-hulls | 0.0001 | 0.0-0.01 |
PyBullet is an easy to use Python module for physics simulation for robotics, games, visual effects and machine learning, with a focus on sim-to-real transfer. From version 2.6.7, PyBullet includes V-HACD embedded:
pip3 install pybullet --upgrade --user
#now in a script you can use
import pybullet as p
import pybullet_data as pd
import os
p.connect(p.DIRECT)
name_in = os.path.join(pd.getDataPath(), "duck.obj")
name_out = "duck_vhacd2.obj"
name_log = "log.txt"
p.vhacd(name_in, name_out, name_log, alpha=0.04,resolution=50000 )



