- A Star
- B Star (with bugs!)
- BFS
- DFS
-
手动设置:
- 鼠标左键点击设置障碍物,右键点击清除障碍物。按住左/右键不松,移动鼠标,可连续设置/清除障碍物。
- 左键点击一个点,然后按住
shift键,再点击一个点,即可生成水平或竖直直线。
-
随机生成: 点击
Random Obstacles按钮,输入千分比,自动随机生成相应比例的障碍物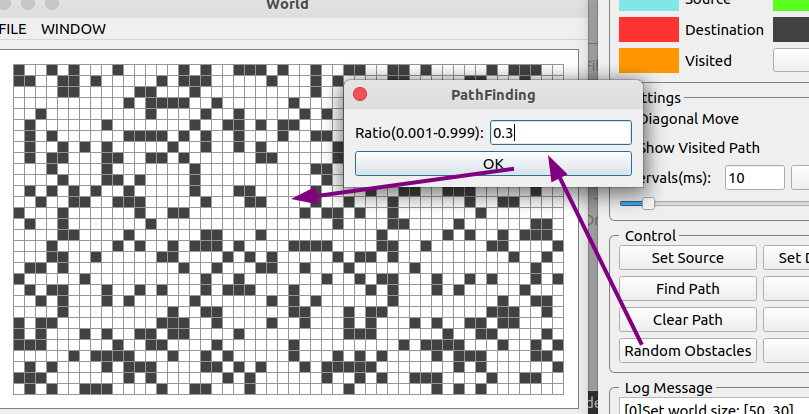


双击颜色块,即可修改相应的颜色

如果要写其他寻路算法,只需要继承自FindPathBase类,
并重写std::list<Coordinate> findPath(src, dest)函数。
例如,假设有一个新的 算法 C Star :
注意: 标有 [Required] 的地方是必须要写的 !
class CStar : public FindPathBase
{
public:
std::list<Coordinate> findPath(const Coordinate& src, const Coordinate& dest) {
stopFindPath = false; // [Required]
// ...
// 开始寻路
while (...) {
// 是否强制终止寻路, [Required]
if (stopFindPath) {
return {};
}
// ...
// 新的点 newCoord
Coordinate newCoord = ...;
// 该点是障碍物
if (detectObstacle(newCoord)) {
continue;
}
// 该点是目标,返回
else if (newCoord == dest) {
std::list<Coordinate> path;
// add coord to path
// ...
return path;
}
else {
// 通知GUI线程,绘制该点(已经访问的点,默认为橘色) [Required]
notifyVisitedCoordinate(newCoord);
// ...
}
// ...
}
// ...
return {}; // 返回空路径
}
}
然后在src/controldialog.cpp中,将该算法添加到候选列表中
1、构造函数中,添加
comboxFindPathList->addItem("C Star"); // 算法名称
2、onFindPathMethodChanged函数中,添加
else if (methodName == "C Star") {
findPathBaseNew = new CStar();
if (controlPanelExtend) {
delete controlPanelExtend;
controlPanelExtend = nullptr;
}
// 扩展控制面板(该算法的独有的设置项,如果没有,就忽略)
//controlPanelExtend = new ControlPanelExtendCStar(world, nullptr);
}





Only suitable for situations with few obstacles. (At least)

Author: github@Leopard-C
Email: leopard.c@outlook.com