北京化工大学本科毕业设计《基于深度强化学习的云工作流调度》
关键词:有向无环图,工作流,深度强化学习,图神经网络; 蒙特卡洛树搜索
It requires the following packages:
- Python 3.9.7
- torch 1.10
- gym 0.21.0
- networkx 2.6.3
- 将 Env/___.py 文件注册在gym的环境中;
- 运行 DAGs_generator.py 生成 train dataset, test dataset.
- 修改环境代码适应生成数据集的路径;
- 运行 PPO/DRLagent.py 训练网络;
- 运行 PPO/DRLtest.py 测试推理。
- 运行baseline_tableau.py 得出baseline算法效果
- 运行MonteCarloTreeSearch.py 得出MCTS算法效果
2022.03.11
2020.03.23
- 结合Decima中的GCN对DAG进行编码,改变编码数量,效果不佳
- 完成深度强化学习加速蒙特卡洛树搜索算法(魔改spear),目前在DAG_size=10大小上效果最佳。
- 编写了单个DAG任务资源用量检测脚本。
2020.04.19
- 完成蒙特卡洛树n=10-50的所有实验
- 完成毕业论文初稿
- 下一步优化GCN编码
工作流通常由DAG(有向无环图)来定义,其中每个计算任务$T_i$由一个顶点表示。同时,任务之间的每个数据或控制依赖性由一条加权的有向边$E_{ij}$表示。每个有向边$E_{ij}$表示$T_i$是$T_j$的父任务,$T_j$只能在其所有父任务完成后执行。一般在所有任务之前设立一个Start虚拟节点,作为所有没有父任务节点的父节点;同理,在所有任务之后设立一个Exit虚拟节点,作为所有没有子任务节点的子节点,这两个虚拟节点都没有计算资源需求。
确定表示一个DAG需要三个数据,分别是是节点连接信息,各节点的父节点数,各节点的子节点数。由这三个元素可以确定一个独立的DAG。
例如一个10个节点的DAG:
Edges: [(1, 5), (1, 6), (2, 4), (2, 6), (3, 6), (4, 7), (4, 9), (5, 9), (5, 7), (6, 7), ('Start', 1), ('Start', 2), ('Start', 3), ('Start', 8), ('Start', 10), (7, 'Exit'), (8, 'Exit'), (9, 'Exit'), (10, 'Exit')]
In_degree: [1, 1, 1, 1, 1, 3, 3, 1, 2, 1]
out_degree: [2, 2, 1, 2, 2, 1, 1, 1, 1, 1]
表示的是下面这一张图。

图 1 一个DAG示例
参数设定为:
size = [20,30,40,50,60,70,80,90] #DAG中任务的数量
max_out = [1,2,3,4,5] #DAG节点的最大出度
alpha = [0.5,1.0,1.5] #控制DAG 的形状
beta = [0.0,0.5,1.0,2.0] #控制 DAG 的规则度
具体的实现细节如下:
-
根据公式$length=\frac{\sqrt{size}}{alpha}$计算出生成DAG的层数,并计算平均每层的数量$\frac{size}{length}$.
-
在以均值为$\frac{size}{length}$,标准差为$beta$的正态分布中采样每层的任务数并向上取整,这样随机采样得到的总任务数可能有偏差,随机在某几层添加或者删除任务,使DAG总任务数等于$size$。
-
对于第一层到倒数第二层:每一个任务随机在[0,
$max_out]$ ,并随机连接$n$个下一层的任务。 -
最后给所有没有入边的任务添加Start作为父节点,所有没有出边的任务添加Exit任务作为子节点,至此一个随机的DAG就生成好了。
在这里$alpha$控制的是DAG的整体形状,如果$alpha$越小,DAG越长,$alpha$越大,DAG越短。

图2 不同alpha下DAG的形状(n=30)
对DAG中每一个任务随机分配它的持续时间和资源需求(CPU,Memory)。
为了模拟一些时间占用相对较长的任务,定义一个概率prob=80%,每个任务的持续时间有80%的几率在$[t,3t]$的范围内随机取值,20%的概率在$[10t,15t]$的范围内随机取值。
每个任务有50%的概率为CPU密集型任务,剩下的50%是Memory密集型的任务。
CPU密集型的任务CPU的资源占用量在$[0.25r,0.5r]$中随机取值,Memory的资源占用量在$[0.05,0.01]$随机取值。Memory密集型的任务资源需求量相反。
举一个根据以上规则生成的工作流信息的例子,对10个任务的 DAG 随机生成的工作流信息如下表示: (r=100,t=10)
任务占用时间 Ti: [27.174, 23.215,24.209,15.085, 20.691,29.892,20.632, 26.777, 19.402,18.362]
任务资源占用 (res_cpu,res_memory): [(31.432, 1.019), (4.7330, 25.308), (1.208, 42.542), (1.517, 47.633), (39.299, 4.826), (1.654, 46.401), (2.438, 35.593), (3.887, 42.224), (1.594, 30.074), (42.445, 3.225)]
-
当前执行的时间(1维)
-
当前资源中剩余的 CPU 资源(1维)
-
当前资源中剩余的 Memory 资源(1维)
-
Ready_task 任务列表(长度为 10)中的任务要求时间(30维)如果不足30空位补-1
-
Ready_task 任务列表中的 CPU 要求资源(30维) 如果不足30空位补-1
-
Ready_task 任务列表中的 Memory 要求资源(30维) 如果不足30空位补-1
-
当前未完成 DAG 部分的最大路径长度(1维)
-
当前未完成 DAG 部分的子节点数(1维)
-
超出 Ready_task 任务列表长度且准备好的任务的时间要求总和(1维)
-
超出 Ready_task 任务列表长度且准备好的任务的 CPU 要求总和(1维)
-
超出 Ready_task 任务列表长度且准备好的任务的 Memory 要求总和(1维)
共98维状态。
{-1,0,1,2,3,4,5,6,7,8,9,...,29}
•选择
•选择$a=0\sim29$表示把当前 Ready_task 任务列表的第a个任务提交给计算资源。此时当前执行时间不变,当前CPU/Memory资源减去该任务占用的资源。
•选择
•选择$ a=0\sim9$:
实验采用OpenAI 强化学习gym平台,自定义的工作流调度环境主要包括两个函数:
step函数用于智能体与环境进行交互,输入动作action返回的是下一步的状态state,该步的reward,是否执行完一整个个DAG任务,和动作是否有效(infor)。 当接受到动作后智能体首先判断该动作是否有效:
a) 该动作对应的位置是没有任务(数据是-1),动作无效。
b) 计算资源不能能满足该位置上的任务的CPU/Memory资源需求,动作无效。
c) 如果当前计算资源中没有提交的任务,动作$a=-1$是无效的。
如果动作无效,重新采样动作;
如果动作有效,则更新状态:
a) $ a=0\sim29$ :计算资源中CPU/Memory分别减去该任务占用的资源,更新Ready_task 任务列表中该任务对应位置上的执行时间,CPU/Memory资源全部置为-1,表示该任务已经提交给计算机。
b)
reset函数表示初始化环境,包括随机生成一个DAG并且生成工作流信息。返回的是初始38维状态。
采用Actor-Critic框架,伪代码如下。引入两个结构相同的网络分别作为策略网络和状态价值网络,策略网络输出的是动作的概率分布,状态价值网络输出的是当前状态的估计价值。
采用REINFORCE算法更新Actor网络,在计算target(
由于动作采样可能采样到无效动作(例如Ready_task 任务列表只有3个任务,动作采样到了9),当动作无效时,记录当前actor网络输出的概率分布,将采样到的动作概率置0,按照其他动作的概率重新生成分布,再从新的分布中采样动作,直到动作有效。但是在最后更新actor网络时,$\nabla_{\boldsymbol{\theta}} \log \pi\left(A_{t} \mid S_{t}, \boldsymbol{\theta}\right)$的计算还是用最开始记录的概率。

暂时未更新伪代码,代码来源https://github.com/nikhilbarhate99/PPO-PyTorch。

蒙特卡洛树搜索是一种高效的决策规划算法,主要应用于以 (状态,行动) 定义和用模拟进行 预测输出结果的领域(例如:围棋)。它是一种基于树数据结构的、在搜索空间巨大的时候仍 然比较有效的搜索算法。

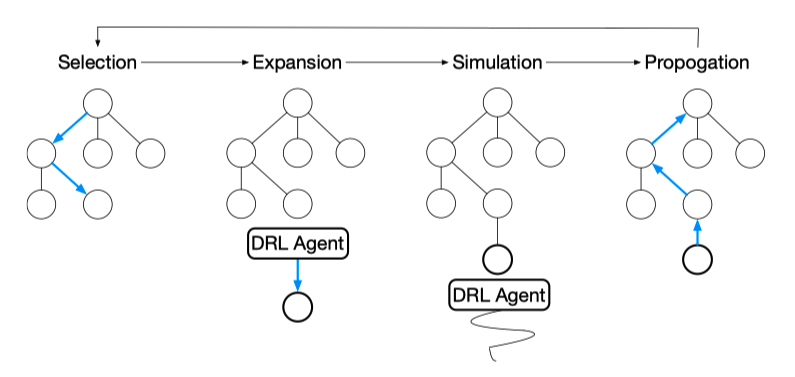
蒙特卡洛树搜索算法主要分为 4 步:选择,扩展,模拟,回溯。 我们将节点分成三类:
-
未访问:还没有评估过当前局面
-
未完全展开:被评估过至少一次,但是子节点(下一步的局面)没有被全部访问过,可以进一步扩展
-
完全展开:子节点被全部访问过
我们找到目前认为「最有可能会走到的」一个未被评估的局面,并且选择它。
(1) 选择(seletion):这一步会从根节点开始,根据树策略选一个“最值得搜索的叶子节点”,一般使用 Upper Confidence Bound Applied to Trees(UCT) 标准选择分数最高的节点,直到来到一个“存在未 扩展的子节点”的节点。
UCT:
$\quad$ score$=\frac{w_{i}}{n_{i}}+c \sqrt{\frac{\ln N_{i}}{n_{i}}}$ 式中
$w_i$ 是$ i$ 节点胜利次数,$n_i$ 是$i$ 节点的模拟次数,$N_I$ 是所有模拟次数,$c$ 是探索常数,$c$ 约小越偏向于开发,$c$ 越大越偏向于试探。这个树策略函数相当于在开发和试探做权衡。(2) 扩展(expansion):在选择阶段结束时候,我们查找到了一个最迫切被拓展的节点
$N$ ,以 及一个尚未拓展的动作$ A$。动作$A $ 选取在这里是随机的。(3) 模拟 (simulation):我们从
$N_n$ 开始,让游戏快速地随机进行,直到得到一个游戏结局, 得到的是一次蒙特卡洛实验,这个结局将作为$N_n$ 的初始评分。一般使用胜利/失败来作为评分,只有$1$ 或者$0$。 模拟一般适合很快可能不是很精确的策略。比如一般的蒙特卡洛树使用随机的策略,精度不一定高,但速度快,本文使用了 DRL 辅助搜索策略,结果又快又准。(4) 回溯 (backpropagation):在
$N_n$ 的模拟结束之后,从叶节点到根节点由下到上的路径上的所有节 点都会根据本次模拟的结果来更新累计评分。 每一次迭代都会拓展搜索树,随着迭代次数的增加,搜索树的规模也不断增加。当到了一定的迭代 次数或者时间之后结束,选择根节点下最好的子节点作为本次决策的结果。蒙特卡洛树结合深度强化学习智能体搜索
论文:Multi-resource packing for cluster schedulers
Spear 使用 DRL 加速蒙特卡洛树搜索,解决了目标是 makespan 最短的多资源需求的 DAG 问 题。Spear 根据当前计算资源和任务的状态用 MCTS 搜索最佳动作,在树扩张和模拟的过程中 使用 DRL 来将搜索区域缩小到更具有价值的动作空间。结果表明,Spear 在花费相同的时间 内,完成时间上要短于之前最好的方法 Graphene。
Spear: 核心**:用 DRL 模型替代 MCTS 中扩展和模拟中随机选择动作的策略。有以下优点:
(1) 训练过的 DRL 模型,可以将动作搜索范围缩小到那些更快完成调度任务的动作上;
(2) 在 Simulation 中可以精准的估计每一个状态的 makespan。
改进的蒙特卡洛树搜索:
(1) 选择:将UCT公式中的前一项改为最大的 reward,也就是:
score $=\max {I}+c \sqrt{\frac{\ln N{i}}{n_{i}}}$
(2) 扩展: 当前状态下有许多动作都是没必要探索的,传统的 MCTS 使用随机策略选择动作, 很显然是不高效的。不过,训练好的 DRL 模型可以高效的选择未被探索过的动作,根据 策略网络输出动作的概率,makespan 越小的动作具有越高的概率。
(3) 模拟:同样使用训练好的 DRL 模型来选择动作,这提供了更有意义的 makespan 估计。
(4)回溯:更新从叶节点到根节点路径上所有节点的值:max{current_value, new_value } , 并且记录该节点上 value 的平均值。
-
The budget(控制树搜索次数):$\max \left(\frac{b_{i n i t i a l}}{d_{i}}, b_{\min }\right)$
$d_i$ 是目前树的深度,$b_{initial}$ 是初始迭代预算次数,$b_min$ 是最小迭代预算次数。

- Shortest Job First(SJF):首先选择耗时最短的任务执行。SJF首先按可执行任务的时间从小到大排序,将任务放入计算资源中直到放不下后,再执行动作$a=-1$
- Random:在{-1,0,1,2,3,4,5,6,7,8,9}中随机执行动作,若遇到无效动作重新随机。
- Tetris: Multi-Resource Packing for Cluster Schedulers 中为最小makespan设计的策略。
Tetris, a cluster scheduler that packs tasks to machines based on their requirements along multiple resources.
objectives:
$\bullet$Packing Efficiency for Makespan
$\bullet$Average Completion Time
$\bullet$Fairness
现在Ready task列表中有2个任务,CPU和memory需求资源分别为:
假设当前资源中CPU和memory剩余的资源为(30,60)。
计算任务的Alignment Score:
因为$AS_{2}>AS_{3}$,因此先选择$t_{2}$执行。
在每次选择动作的时候,计算ready task中的每一个任务的Alignment Score,选择最大AC的任务放在计算资源上,然后重复计算,放置,直到计算资源上不能再容纳更多的任务,这时候动作$a=-1$。
在只考虑makespan时不一定能减少任务的平均完成时间。例如:
Machines have 2 cores and 4GB of memory.
$t_{1} $ 有6个任务,每个任务需要 [2 cores, 3 GB],
如果按照alignment score的方法的计算,先执行$t_1$,再执行$t_{2}$,这样的话很明显平均任务完成时间要比先先执行$t_1$再执行$t_{2}$的长。、
一种常见的减少任务平均完成时间的算法就是Shortest Job First(SJF)。
为了同时优化Makespan和average completion time两个目标,定义分数:$(a+\varepsilon \cdot p)$
式中,$\varepsilon=(\bar{a} / \bar{p})$,$a$ 表示 alignment score,$p$表示任务持续时间。
以上三种方法均在同样的gym环境中交互,这意味着SJF方法知道Ready_task 任务列表30个长度的信息。

N=10