This is a C++ library with ROS interface to manage two-dimensional grid maps with multiple data layers. It is designed for mobile robotic mapping to store data such as elevation, variance, color, friction coefficient, foothold quality, surface normal, traversability etc. It is used in the Robot-Centric Elevation Mapping package designed for rough terrain navigation.
Features:
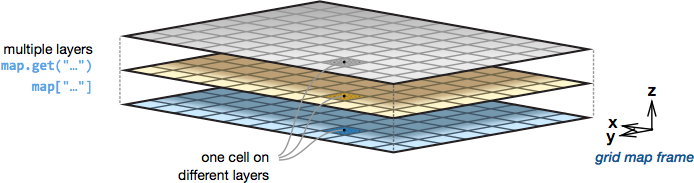
- Multi-layered: Developed for universal 2.5-dimensional grid mapping with support for any number of layers.
- Efficient map re-positioning: Data storage is implemented as two-dimensional circular buffer. This allows for non-destructive shifting of the map's position (e.g. to follow the robot) without copying data in memory.
- Based on Eigen: Grid map data is stored as Eigen data types. Users can apply available Eigen algorithms directly to the map data for versatile and efficient data manipulation.
- Convenience functions: Several helper methods allow for convenient and memory safe cell data access. For example, iterator functions for rectangular, circular, polygonal regions and lines are implemented.
- ROS interface: Grid maps can be directly converted to and from ROS message types such as PointCloud2, OccupancyGrid, GridCells, and our custom GridMap message. This package also contains compatibility with costmap_2d.
- OpenCV interface: Grid maps can be seamlessly converted from and to OpenCV image types to make use of the tools provided by OpenCV.
- Visualizations: The grid_map_rviz_plugin renders grid maps as 3d surface plots (height maps) in RViz. Additionally, the grid_map_visualization package helps to visualize grid maps as point clouds, occupancy grids, grid cells etc.
The grid map package has been tested with ROS Indigo, Jade (under Ubuntu 14.04) and Kinetic (under Ubuntu 16.04). This is research code, expect that it changes often and any fitness for a particular purpose is disclaimed.
The source code is released under a BSD 3-Clause license.
Author: Péter Fankhauser
Maintainer: Péter Fankhauser, pfankhauser@ethz.ch
With contributions by: Martin Wermelinger, Philipp Krüsi, Remo Diethelm, Ralph Kaestner, Elena Stumm, Dominic Jud, Daniel Stonier, Christos Zalidis
Affiliation: Autonomous Systems Lab, ETH Zurich

If you use this work in an academic context, please cite the following publication(s):
-
P. Fankhauser and M. Hutter, "A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation", in Robot Operating System (ROS) – The Complete Reference (Volume 1), A. Koubaa (Ed.), Springer, 2016. (PDF)
@incollection{Fankhauser2016GridMapLibrary, author = {Fankhauser, P{\'{e}}ter and Hutter, Marco}, booktitle = {Robot Operating System (ROS) – The Complete Reference (Volume 1)}, title = {{A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation}}, chapter = {5}, editor = {Koubaa, Anis}, publisher = {Springer}, year = {2016}, isbn = {978-3-319-26052-5}, doi = {10.1007/978-3-319-26054-9{\_}5}, url = {http://www.springer.com/de/book/9783319260525} }
An introduction to the grid map library including a tutorial is given in this book chapter.
The C++ API is documented here:
To install all packages from the grid map library as Debian packages use
sudo apt-get install ros-indigo-grid-map
The grid_map_core package depends only on the linear algebra library Eigen.
sudo apt-get install libeigen3-dev
The grid_map_cv package depends additionally on OpenCV and the grid_map_pcl package depends additionally on PCL.
The other packages depend additionally on the ROS standard installation (roscpp, tf, filters, sensor_msgs, nav_msgs, and cv_bridge).
To build from source, clone the latest version from this repository into your catkin workspace and compile the package using
cd catkin_ws/src
git clone https://github.com/ethz-asl/grid_map.git
cd ../
catkin_make
To maximize performance, make sure to build in Release mode. You can specify the build type by setting
catkin_make -DCMAKE_BUILD_TYPE=Release
This repository consists of following packages:
- grid_map is the meta-package for the grid map library.
- grid_map_core implements the algorithms of the grid map library. It provides the
GridMapclass and several helper classes such as the iterators. This package is implemented without ROS dependencies. - grid_map_ros is the main package for ROS dependent projects using the grid map library. It provides the interfaces to convert grid maps from and to several ROS message types.
- grid_map_cv provides conversions of grid maps from and to OpenCV image types.
- grid_map_pcl provides conversions of grid maps from and to Point Cloud Library (PCL) types.
- grid_map_msgs holds the ROS message and service definitions around the [grid_map_msg/GridMap] message type.
- grid_map_rviz_plugin is an RViz plugin to visualize grid maps as 3d surface plots (height maps).
- grid_map_visualization contains a node written to convert GridMap messages to other ROS message types for example for visualization in RViz.
- grid_map_filters builds on the ROS filters package to process grid maps as a sequence of filters.
- grid_map_demos contains several nodes for demonstration purposes.
Run the unit tests with
catkin_make run_tests_grid_map_core run_tests_grid_map_ros
or
catkin build grid_map --no-deps --verbose --catkin-make-args run_tests
if you are using catkin tools.
The grid_map_demos package contains several demonstration nodes. Use this code to verify your installation of the grid map packages and to get you started with your own usage of the library.
-
simple_demo demonstrates a simple example for using the grid map library. This ROS node creates a grid map, adds data to it, and publishes it. To see the result in RViz, execute the command
roslaunch grid_map_demos simple_demo.launch -
tutorial_demo is an extended demonstration of the library's functionalities. Launch the tutorial_demo with
roslaunch grid_map_demos tutorial_demo.launch -
iterators_demo showcases the usage of the grid map iterators. Launch it with
roslaunch grid_map_demos iterators_demo.launch -
image_to_gridmap_demo demonstrates how to convert data from an image to a grid map. Start the demonstration with
roslaunch grid_map_demos image_to_gridmap_demo.launch
-
opencv_demo demonstrates map manipulations with help of OpenCV functions. Start the demonstration with
roslaunch grid_map_demos opencv_demo.launch
-
resolution_change_demo shows how the resolution of a grid map can be changed with help of the OpenCV image scaling methods. The see the results, use
roslaunch grid_map_demos resolution_change_demo.launch


The grid map library contains various iterators for convenience.
| Grid map | Submap | Circle | Line | Polygon |
|---|---|---|---|---|
 |
 |
 |
 |
 |
| Ellipse | Spiral | |||
 |
 |
Using the iterator in a for loop is common. For example, iterate over the entire grid map with the GridMapIterator with
for (grid_map::GridMapIterator iterator(map); !iterator.isPastEnd(); ++iterator) {
cout << "The value at index " << (*iterator).transpose() << " is " << map.at("layer", *iterator) << endl;
}
The other grid map iterators follow the same form. You can find more examples on how to use the different iterators in the iterators_demo node.
Note: For maximum efficiency when using iterators, it is recommended to locally store direct access to the data layers of the grid map with grid_map::Matrix& data = map["layer"] outside the for loop:
grid_map::Matrix& data = map["layer"];
for (GridMapIterator iterator(map); !iterator.isPastEnd(); ++iterator) {
const Index index(*iterator);
cout << "The value at index " << index.transpose() << " is " << data(index(0), index(1)) << endl;
}
You can find a benchmarking of the performance of the iterators in the iterator_benchmark node of the grid_map_demos package which can be run with
rosrun grid_map_demos iterator_benchmark
Beware that while iterators are convenient, it is often the cleanest and most efficient to make use of the built-in Eigen methods. Here are some examples:
-
Setting a constant value to all cells of a layer:
map["layer"].setConstant(3.0); -
Adding two layers:
map["sum"] = map["layer_1"] + map["layer_2"]; -
Scaling a layer:
map["layer"] = 2.0 * map["layer"]; -
Max. values between two layers:
map["max"] = map["layer_1"].cwiseMax(map["layer_2"]); -
Compute the root mean squared error:
map.add("error", (map.get("layer_1") - map.get("layer_2")).cwiseAbs()); unsigned int nCells = map.getSize().prod(); double rootMeanSquaredError = sqrt((map["error"].array().pow(2).sum()) / nCells);
There are two different methods to change the position of the map:
setPosition(...): Changes the position of the map without changing data stored in the map. This changes the corresponce between the data and the map frame.move(...): Relocates the grid map such that the corresponce between data and the map frame does not change. Data in the overlapping region before and after the position change remains stored. Data that falls outside of the map at its new position is discarded. Cells that cover previously unknown regions are emptied (set to nan). The data storage is implemented as two-dimensional circular buffer to minimize computational effort.
setPosition(...) |
move(...) |
|---|---|
 |
 |
This RViz plugin visualizes a grid map layer as 3d surface plot (height map). A separate layer can be chosen as layer for the color information.

This node subscribes to a topic of type grid_map_msgs/GridMap and publishes messages that can be visualized in RViz. The published topics of the visualizer can be fully configure with a YAML parameter file. Any number of visualizations with different parameters can be added. An example is here for the configuration file of the tutorial_demo.
| Point cloud | Vectors | Occupancy grid | Grid cells |
|---|---|---|---|
 |
 |
 |
 |
-
grid_map_topic(string, default: "/grid_map")The name of the grid map topic to be visualized. See below for the description of the visualizers.
-
/grid_map(grid_map_msgs/GridMap)The grid map to visualize.
The published topics are configured with the YAML parameter file. Possible topics are:
-
point_cloud(sensor_msgs/PointCloud2)Shows the grid map as a point cloud. Select which layer to transform as points with the
layerparameter.name: elevation type: point_cloud params: layer: elevation flat: false # optional -
flat_point_cloud(sensor_msgs/PointCloud2)Shows the grid map as a "flat" point cloud, i.e. with all points at the same height z. This is convenient to visualize 2d maps or images (or even video streams) in RViz with help of its
Color Transformer. The parameterheightdetermines the desired z-position of the flat point cloud.name: flat_grid type: flat_point_cloud params: height: 0.0Note: In order to omit points in the flat point cloud from empty/invalid cells, specify the layers which should be checked for validity with
setBasicLayers(...). -
vectors(visualization_msgs/Marker)Visualizes vector data of the grid map as visual markers. Specify the layers which hold the x-, y-, and z-components of the vectors with the
layer_prefixparameter. The parameterposition_layerdefines the layer to be used as start point of the vectors.name: surface_normals type: vectors params: layer_prefix: normal_ position_layer: elevation scale: 0.06 line_width: 0.005 color: 15600153 # red -
occupancy_grid(nav_msgs/OccupancyGrid)Visualizes a layer of the grid map as occupancy grid. Specify the layer to be visualized with the
layerparameter, and the upper and lower bound withdata_minanddata_max.name: traversability_grid type: occupancy_grid params: layer: traversability data_min: -0.15 data_max: 0.15 -
grid_cells(nav_msgs/GridCells)Visualizes a layer of the grid map as grid cells. Specify the layer to be visualized with the
layerparameter, and the upper and lower bounds withlower_thresholdandupper_threshold.name: elevation_cells type: grid_cells params: layer: elevation lower_threshold: -0.08 # optional, default: -inf upper_threshold: 0.08 # optional, default: inf -
region(visualization_msgs/Marker)Shows the boundary of the grid map.
name: map_region type: map_region params: color: 3289650 line_width: 0.003
Note: Color values are in RGB form as concatenated integers (for each channel value 0-255). The values can be generated like this as an example for the color green (red: 0, green: 255, blue: 0).
| Indigo | Jade | Kinetic | |
|---|---|---|---|
| grid_map | |||
| doc |
| Indigo | Jade | Kinetic | |
|---|---|---|---|
| grid_map | |||
| grid_map_core | |||
| grid_map_ros | |||
| grid_map_msgs | |||
| grid_map_rviz_plugin | |||
| grid_map_visualization | |||
| grid_map_filters | |||
| grid_map_loader | |||
| grid_map_demos |
Please report bugs and request features using the Issue Tracker.