orbslam_semantic_nav_ros
清华大学 深圳国际研究生院
先进制造学部 精密测控组
Have Done:
-
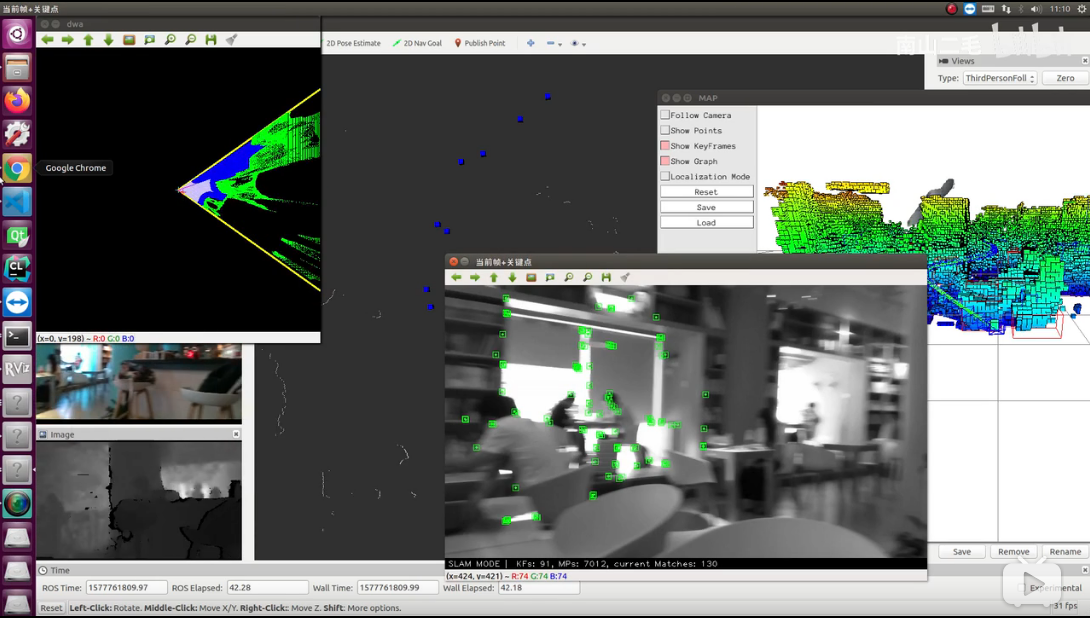
动态物体检测
-
视觉建图与定位
-
重定位
-
稠密点云、面元三维重建
-
语义地图
-
手势识别控制
-
语音唤醒与识别控制
-
局部避障与DWA控制
-
语音识别与播放
TODO:
-
添加基于二维码的全局定位误差矫正功能,该功能可以提高系统稳定性,确保项目落地
-
多个相机slam,增强系统鲁棒性
-
二维投影地图构建,全局路径规划,智能导航与交互
-
基于强化学习的自主探索系统
-
待定
演示1:

演示2:
安装说明
系统版本要求:
-
Linux:ubuntu16
-
ros:kinect
已测试硬件:
-
KinectV2相机
-
realsense D435,D400相机
(1) 添加Vocabulary
在ros包的下新建Vocabulary文件夹,添加ORBvoc.txt词典。
mkdir Vocabulary
add ORBvoc.txt
(2) 安装腾讯ncnn库
cd Thirdparty/ncnn
mkdir build&&cd build
cmake ..
make
sudo make install
sudo cp Thirdparty/ncnn/build/install/lib/libncnn.a /usr/lib
(3) 其他库
vtk 5
pcl 1.7
opencv 3.4
Eigen
octomap
(4) 安装科大讯飞语音相关库
- step1 在科大讯飞注册账户,修改setting_file.yaml中的appid参数
- step2 安装相关库
sudo apt-get install libasound2-dev #asound库
sudo apt-get install mplayer #mplayer工具
- step3 在科大讯飞官网下载SDK,在fileroot/libs/x64中将libmsc.so文件复制到/usr/local/lib中
(5) 安装百度aip相关库
sudo apt-get install ros-kinetic-image-view
sudo apt-get install libjsoncpp-dev
sudo apt-get install openssl
sudo apt-get install curl
修改setting_file.yaml中的中的百度appid,AK,SK
(6) 开始下载源码进行编译
mkdir -p catkin_ws/src
git clone git@github.com:MRwangmaomao/semantic_slam_nav_ros.git
cd ..
catkin_make
(7) 修改config文件夹下的setting.yaml文件和对应的相机的配置文件、DWA配置文件
修改所有的rospackage_path参数,设置为自己对应存储的路径。
修改color_img_topic和depth_img_topic
(8) 相关公开数据集下载
动态环境的ORBSLAM


语义地图
roslaunch slam_semantic_nav_ros ORB_Semantic_Nav.launch


三维重构

代价地图与导航

语音对话
roslaunch slam_semantic_nav_ros gesture_speak.launch
手势识别


Five手势: 空闲状态,可以由其他节点发送/cmd_vel速度指令进行控制
Ok手势: 前进,只受手势控制,需要手势解锁
Fist手势: 停止状态,只受手势控制,需要手势解锁
roslaunch slam_semantic_nav_ros gesture_speak.launch