NOTE: SDK v5.1+ is required to use this
NOTE: an OpenRC-based SDK is NOT required to use this
Finally, a straightforward and easy way to use OpenCV on an FTC robot! With this library, you can go from a stock SDK to running a sample OpenCV OpMode, with either an internal or external camera, in just a few minutes!
Features at a glance:
- Supports concurrent streaming from:
- An internal camera and a webcam
- Two webcams
- Two internal cameras (select devices; internal cameras must not share the same bus)
- Supports Driver Station camera preview feature introduced in SDK v5.1
- Supports tapping on the viewport to cycle through the various stages of a pipeline (see PipelineStageSwitchingExample)
- Supports using webcams directly with OpenCV instead of going through a Vuforia instance
- Supports changing pipelines on-the-fly (while a streaming session is in flight)
- Supports dynamically pausing/resuming live viewport to save battery and CPU time
- Support for rotating stream based on physical camera orientation (e.g. use a webcam in portrait without having to mess with rotation yourself)
- Loads 10MB native library for OpenCV from internal storage to prevent bloating the APK
Unfortunately, due to a known bug with OpenCV 4.x, EasyOpenCV is only compatible with devices that run Andorid 5.0 or higher. For FTC, this means that it is incompatible with the ZTE Speed. EasyOpenCV will work fine on all other FTC-legal devices (including the new Control Hub).
IMPORTANT NOTE: This tutorial assumes you are starting with a clean SDK project. This library includes the OpenCV Android SDK, so if you have already installed OpenCV in your project through the traditional means, you will need to remove it first. Otherwise, you will get a compiler error that multiple files define the same class.
IMPORTANT NOTE #2: Do NOT locally clone and/or import this project unless you want to develop this library itself! If you're just a normal user, follow the below instructions verbatim.
-
Open your FTC SDK Android Studio project
-
Open the
build.common.gradlefile: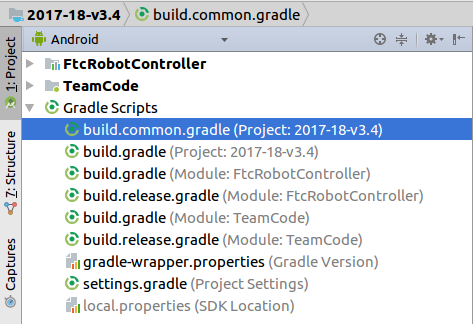
-
Add
jcenter()to therepositoriesblock at the bottom: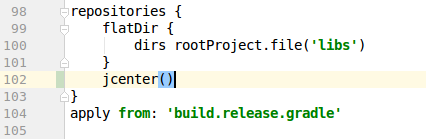
-
Open the
build.gradlefile for the TeamCode module: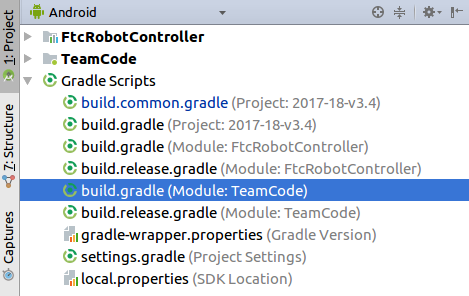
-
At the bottom, add this:
dependencies { implementation 'org.openftc:easyopencv:1.3.2' } -
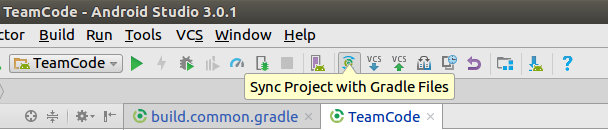
Now perform a Gradle Sync:
-
Because EasyOpenCv depends on OpenCV-Repackaged, you will also need to copy
libOpenCvNative.sofrom the/docfolder of that repo into theFIRSTfolder on the USB storage of the Robot Controller (i.e. connect the Robot Controller to your computer with a USB cable, put it into MTP mode, and drag 'n drop the file) . -
Congrats, you're ready to go! Now check out the example OpModes.




Feel free to submit a pull request if you know how to fix any of these!
- Currently, this library uses the SDK's built-in UVC driver for webcam support. Unforutnetly, the SDK's UVC driver is a buggy mess. This can cause all sorts of undesirable things to happen, such as crashes on USB disconnection, (or, if it survived the USB disconnection, hanging/deadlock when trying to stop the OpMode after the connection was restored), crashing of the Linux kernel if run too many times in a row, etc. However, the architecture of this library has been designed such that it would be straightforward to integrate an alternate implementation that would use a 3rd party UVC driver.
- Internal camera support is currently provided via the Android Camera v1 API. This means that manual focus/exposure/ISO control is not possible. Edit: as of v1.3.2, exposure compensation and lock is now supported, which, while it does not provide all the benefits of manual exposure, is probably sufficient for most needs. However, the architecture of this library has been designed such that it would be straightforward to integrate an alternate implementation that used the Camera v2 API.
- Resolutions >480p are now possible with webcams (at reduced framerates)
- Add exposure compensation and autoexposure lock APIs for internal camera
- Fix blank display when user pipeline returned cropped mat of type CV_8UC1 (e.g. masks)
- Print supported resolutions when user selects illegal resolution for camera
- Transitive dependency on OpenCV-Repackged updated to 4.1.0-B, which drastically improves error handling when loading native library
- Add official support for multiple concurrent camera streams (was possible before but required manual activity UI modifications)
- Also allows for running Vuforia alongside EasyOpenCV
- Add "TrackerAPI" classes (ability to run multiple OpenCV algorithms in the same pipeline, and switch between which output is rendered to the screen in realtime by tapping the viewport)
- Add support for rendering cropped returns from user pipeline
- A little internal code cleanup
- Optimise viewport to re-use existing framebuffer memory
- Fix issue where if a user pipeline created a submat from the input Mat, the submat would be de-linked from the input buffer on the next frame
- Added ability to use some advanced features for internal cameras:
- Added ability to set "recording hint"
- Added ability to set "hardware frame timing range"
- Added ability to control zoom
- Added ability to control flashlight
- Added support for using double buffering (default; can improve FPS)
- API change: camera instances are now created by invoking
OpenCvCameraFactory.getInstance().create... - Add examples:
- InternalCameraAdvancedFeaturesExample
- MultipleCameraExample
- MultipleCameraExampleOpenCvAlongsideVuforia
- TrackerApiExample
- HOTFIX: implement workaround for SDK bug of RenderScript failing to initialize on some devices which prevented the webcam frames from being forwarded through the JNI to the Java side (See issue #1)
- SDK v5.1 or higher now required
- Add support for stream preview on Driver Station
- Fix bug where internal camera was not correctly released
- Fix bug where a null pipeline caused a crash
- API change: user pipelines now need to
extends OpenCvPipelineinstead ofimplements OpenCvPipeline - Add ability for user pipeline to override
onViewportTapped()to be notified if the user taps the viewport - Add
PipelineStageSwitchingExampleto show how to useonViewportTapped()to change which stage of your pipeline is drawn to the viewport for debugging purposes. It also shows how to get data from your pipeline to your OpMode.
- Initial release