Bláznivá križovatka
Škola: Slovenská Technická Univerzita v Bratislave
Fakulta: Fakulta informatiky a informačných technológií
Predmet: Umelá inteligencia
Študent: Bc. František Gič
Cvičiaci: Ing. Ivan Kapustík
Zadanie
Úlohou je nájsť riešenie hlavolamu Bláznivá križovatka. Hlavolam je reprezentovaný mriežkou, ktorá má rozmery 6 krát 6 políčok a obsahuje niekoľko vozidiel (áut a nákladiakov) rozložených na mriežke tak, aby sa neprekrývali. Všetky vozidlá majú šírku 1 políčko, autá sú dlhé 2 a nákladiaky sú dlhé 3 políčka. V prípade, že vozidlo nie je blokované iným vozidlom alebo okrajom mriežky, môže sa posúvať dopredu alebo dozadu, nie však do strany, ani sa nemôže otáčať. V jednom kroku sa môže pohybovať len jedno vozidlo. V prípade, že je pred (za) vozidlom voľných n políčok, môže sa vozidlo pohnúť o 1 až n políčok dopredu (dozadu). Ak sú napríklad pred vozidlom voľné 3 políčka (napr. oranžové vozidlo na počiatočnej pozícii, obr. 1), to sa môže posunúť buď o 1, 2, alebo 3 políčka. Hlavolam je vyriešený, keď je červené auto (v smere jeho jazdy) na okraji križovatky a môže z nej teda dostať von. Predpokladajte, že červené auto je vždy otočené horizontálne a smeruje doprava. Je potrebné nájsť postupnosť posunov vozidiel (nie pre všetky počiatočné pozície táto postupnosť existuje) tak, aby sa červené auto dostalo von z križovatky alebo vypísať, že úloha nemá riešenie.
Implementácia
K vypracovaniu tohto zadania boli použité algoritmy neinformovaného prehľadávania stavového priestoru Depth-first search a
Breadth-first search - konkrétne bez použitia rekurzie.
Programoval som v jazyku JavaScript , lokálnom environmente - Node.js s použitím supersetu Typescript pre striktné otypovanie.
Inštalácia
Prerekvizity:
V root adresári spustite nasledovné príkazy:
npm install
A následne, pre každú transpiláciu typescriptového kódu na javascript a spustenie kódu v node.js:
npm run dev
Algoritmus
Základný scenár pre prehľadávanie stavov znie nasledovne a jednotlivé body si vysvetlíme na konkrétnej ukážke kódu:
-
Vytvor počiatočný uzol a umiestni medzi vytvorené a zatiaľ nespracované uzly
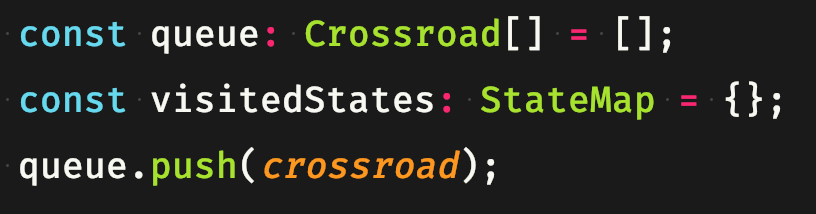
Na obrázku máme možnosť vidieť - crossroad je parameter algoritmu, je to počiatočný stav križovatky a umiestňujeme ho do queue - náš stack nespracovaných uzlov
-
Ak neexistuje žiadny vytvorený a zatiaľ nespracovaný uzol, skonči s neúspechom – riešenie neexistuje.
Táto časť algoritmu je reprezentovaná klasickým while cyklom.
while(queue.length) { ... -
Vyber najvhodnejší uzol z vytvorených a zatiaľ nespracovaných, označ ho aktuálny
- Ak tento uzol predstavuje cieľový stav, skonči s úspechom – vypíš riešenie
- Vytvor nasledovníkov aktuálneho uzla a zaraď ho medzi spracované uzly
- Vytrieď nasledovníkov a ulož ich medzi vytvorené a zatiaľ nespracované
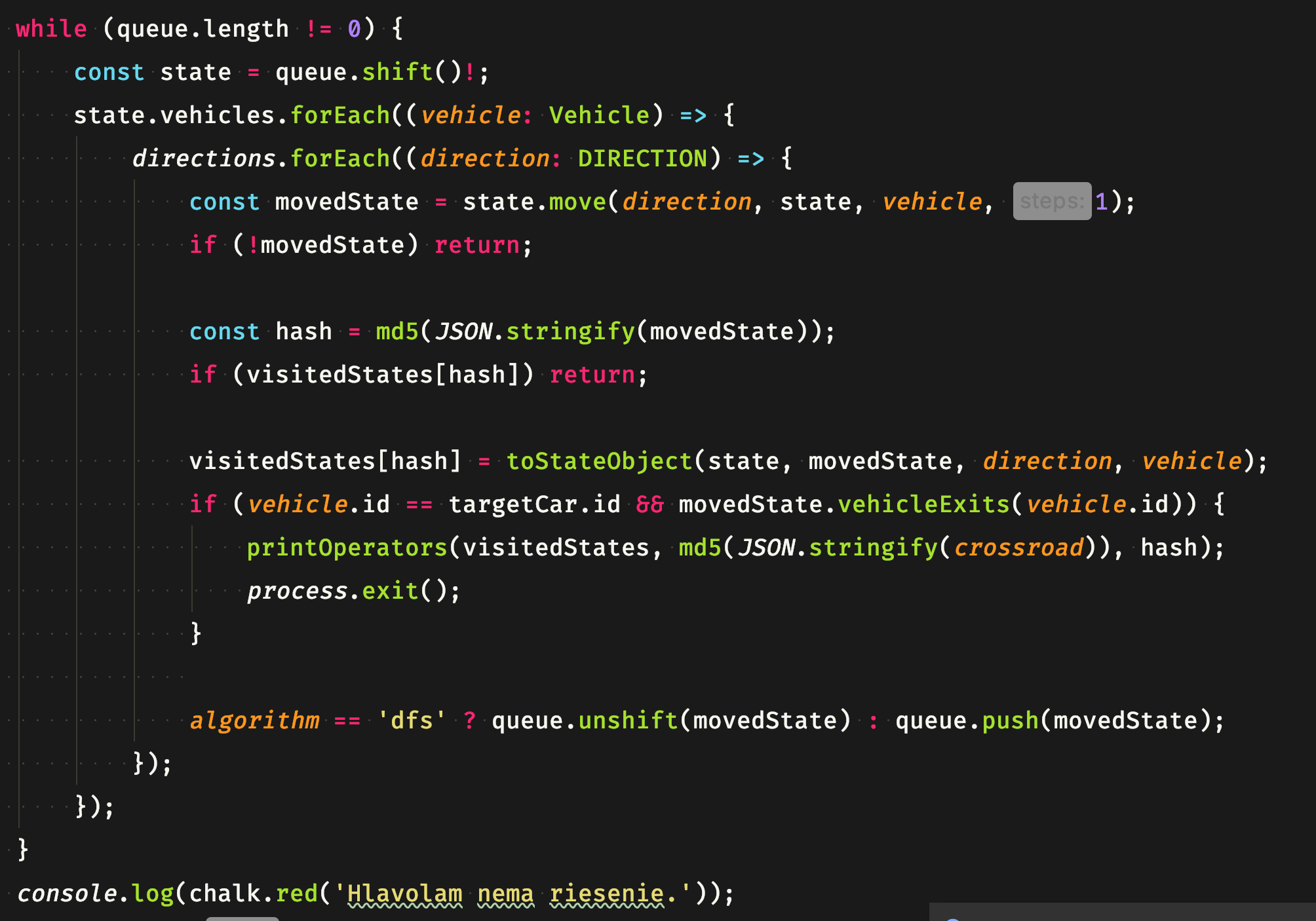
Na obrázku máme možnosť vidieť kompletný algoritmus. Pokúsim sa ho teda opísať:
- Z queue uzlov vyberáme prvý. (Nemáme heuristiku, ideme za radom.)
- Pre každe z vozidiel vehicles vyskúšame všetky možné smery directions.
- Pokiaľ je možné vozidlom pohnúť daným smerom, vznikne nám nový stav (uzol) - movedState
- Následne uzol so stavom vkladáme do hashmapy visitedStates. Pokiaľ tam už existoval predtým, daný stav neanalyzujeme.
- Skontrolujeme či v danom stave nie je vozidlo práve naše cieľové (algoritmus je abstraktný, cieľovým vozidlom môže byť hociktoré z áut)
- Ak nie, daný stav vložíme:
- Na koniec zoznamu - queue - v prípade BFS
- Na začiatok zoznamu - v prípade DFS


Riešenie
Zadanie som spracoval modulárne pre všetky možné vstupy. Jednotlivé vozidlá sú nastaviteľné, majú nastaviteľné poradie, mená, farebnú reprezentáciu, ako aj ich umiestnenie - čo sa mi veľmi osvedčilo pri generovaní testovacích súborov - stačilo zmeniť súbor so súradnicami a je možné vygenerovať N testov.
Modulárna je taktiež MxN veľkosť križovatky a V vozidiel, D dĺžok a taktiež auta, ktoré je našim cieľom - stačí napísať jeho meno - napr. cervene. Východ z križovatky - exit sa tak nastaví na pravý okraj križovatky v leveli daného auta.

Za povšimnutie taktiež stojí grafický mód výstupu - okrem stavových reprezentácii, počtu cieľových operátorov ako aj celkový počet uzlov reprezentujem križovatku aj graficky v konzole.
- V štandardnom móde sa do konzole vykreslí počiatočný a koncový stav.
- V grafickom móde sa vykreslí priebežný stav po každom z operátorov (výsledných - správneho riešenia) - čo ma síce núti pamatäť si i stavy, nielen zoznam uzlov a operátorov-
Pre zapnutie grafického módu treba vscript.tsnastaviťprocess.env.PRINT_GRAPHS = '1';
Reprezentácia údajov problému
Stav
V mojom riešení predstavuje stav samotná trieda Crossroad. Predstavuje objekt obsahujúci dvojrozmerné pole križovatky, veľkosť (kedže je modulárna). Obsahuje taktiež pole vozidiel.
Vozidlo
Údaje o samotnom vozidle vyzerajú nasledovne:

- vozidlo je v dvojrozmernom poli križovatky reprezentované číslom, id.
- pre ludsku reprezentaciu vsak vo vystupe operatorov drzime aj nazov vozidla pod stringom - name.
- tretie pole je pre samotný algoritmus nepodstatný, iba pre grafickú reprezentáciu - hovorí akou farbou má byť vykreslené v konzole.
- moje vozidlá maju modulárnu dĺžku, nie len 2 a 3 - length.
- polarita
- pozícia - pole dvoch čísel [i,j]
Operátory
Operátor reprezentuje v každom z uzlov akciu ktorá sa vykonala, aby prišlo k danému stavu. Obsahuje teda
- smer, ktorým sa pohybovala (RIGHT,LEFT, UP, DOWN)
- vozidlo (v skrátenej forme, iba id a názov)
- počet krokov (koľko krokov sa daným smerom pohybovalo)

Uzol
U nás je daný stav križovatky reprezentovaný triedou Crossroad, týmpádom je troška mylné pomenovať uzol ako State.
Obsahuje však :
- previousHash - keďže JavaScript nemá smerníky, referencujeme sa do hashmapy pomocou kľúča - ktorým je jedinečný hash na predchádzajúci stav
- currentState - samotný stav ktorý uzol reprezentuje
- operator - akcia, operátor ktorý sa vykonal aby sa prešlo z predchádzajúceho na aktuálny

Testovanie
V testovaní som vykonal 6 rôznych testov, v ktorých som menil polohy vozidiel, ako aj aj poradie operátorov. Následne som porovnával počet celkových uzlov, počet reálnych krokov.
Test 1 (zadanie)
Počiatočný stav: ako v zadaní
Cieľové vozidlo: ako v zadaní
Smery (poradie): UP, RIGHT, DOWN, LEFT
DFS

BFS

Vidíme, že v prípade Depth-first searchu prehladal daný algoritmu síce menej jednotlivých uzlov - stavov, avšak výsledná sekvencia operátorov je príliš dlhá na spracovanie. Opačne, Breadth-first search prešiel množstvo rôznych stavov, ale prvá cieľová sekvencia ktorú našiel bola dlhá len 10 krokov (operátorov) !
Test 2
Poznámka: Pre debugovacie potreby sme upravili výpis programu - grafické časti, ako aj výpis operandov pokiaľ je dlhší
V tomto teste sme len zmenili horizontálnu pozíciu zeleného a horizontálnu tmavomodrého nákladiaku.
DFS

BFS

Vidíme že v tomto teste sa DFS veľmi potrápil - a to ide len o tri kroky ktoré človek vidí na prvý pohľad. Chápeme však, čo je za tým. Dôležitým faktorom v oboch algoritmoch je poradie áut, i poradie operátorov. V tomto teste prešiel skoro všetky ostatné vozidlá až kým sa dostal k zelenému - čo vytvára veľké množstvo stavov.
Test 3
Schválne sme vybrali nastavenie, ktoré je jednoznačné. Nastavili sme ako prvý smer doprava, a vozidlá sme upravili tak, aby cieľové vozidlo malo voľnú cestu. Predpokladali sme, že BFS totálne zvalcuje DFS a tak sa aj stalo. Týmto sme potvrdili hypotézu o vplyve poradia smerov na počet celkových uzlov algoritmu.
DFS

BFS

Test 4
Schválny test, na otestovanie správnosti implementácie algoritmov.
DFS

BFS

Test 5
Pre demonštráciu modularity cieľového vozidla sme vytvorili test s blokádou sivého autíčka a nastavním sivého ako nášho cieľového vozidla.
DFS

BFS

Test 6
Posledným krokom je demonštrácia modularity samotnej križovatky. A taktiež demonštrácia, že BFS (aj keď to z niektorých naších testov vyzeralo) nemusí byť vždy lepší. Všetko totiž závisí od daného vstupu, a preto sme vytvorili jeden nasledovný. Zväčšili sme plán na 8x8, cieľové autíčko je sivé a zablokovali sme ho. V prípade DFS - prvý hit, síce 626 krokov, ale málo (6k) uzlov. Tento setup však bol oriešok pre BFS a trval asi najviac zo všetkých - okolo jednej minúty (Quad core i5 2.4GhZ, 16GB RAM). 55 tisic uzlov!
DFS

BFS

Záver
Väčšinu problémov som vysvetlil v samotnom testovaní. Z neho vyplýva nasledovné: Úspešnosť neinformovaných prehľadávaní bez akéhokoľvek ohodnotenia daných stavov je síce v niektorých prípadoch výhodné, ale veľmi závisí od daného nastavenia - vstupu, pozície autíčok, poradiu operátorov - smerov. V mojom zadaní by som vylepšil napríklad počet krokov - momentálne sa autíčka pohybujú v jednej operácií o jeden krok, i keď je to pripravené na modulárny pohyb (stačí zmeniť parameter funkcie). Bolo by zaujímave sledovať napríklad správanie pri maximálnom možnom pohybe - pohybovať vozidlo, kým nenarazí.