- This is a rllab environment for learning human driver models with imitation learning
- This repository does not contain a gail / infogail / hgail implementation
- The reason ngsim_env does not contain the GAIL algorithm implementation is to enable the codebase to be more modular. This design decision enables ngsim_env to be used as an environment in which any imitation learning algorithm can be tested. Similarly, this design decision enables the GAIL algorithm to be a separate module that can be tested in any environment be that ngsim_env or otherwise. The installation process below gets the GAIL implementation from sisl/hgail
- It also does not contain the human driver data you need for the environment to work. The installation process below gets the data from sisl/NGSIM.jl.
- Figure below shows a diagram of the repositories ngsim_env depends on:
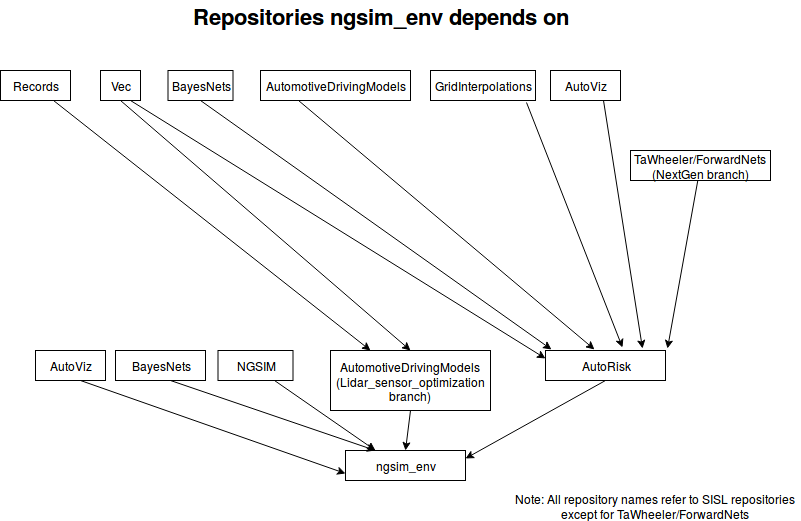

Step-by-step install instructions are at docs/install_env_gail_full.md
- Navigate to ngsim_env/scripts/imitation
- Train a policy, this involves running imitate.py
python imitate.py --exp_name NGSIM-gail --n_itr 1000 --policy_recurrent True- Run the trained policy by using it to drive a car (this creates trajectories on all NGSIM sections using the trained policy). The training step was called imitate. This step is called validate.
python validate.py --n_proc 5 --exp_dir ../../data/experiments/NGSIM-gail/ --params_filename itr_1000.npz --random_seed 42- Visualize the results: Open up a jupyter notebook and use the visualize*.ipynb files.
- the visualize family of ipynb's have headers at the top of each file describing what it does.
- visualize.ipynb is for extracting the Root Mean Square Error
- visualize_trajectories.ipynb creates videos such as the one shown below in the demo section
- visualize_emergent.ipynb calculates the emergent metrics such as offroad duration and collision rate
- see
docs/training.md
- See README files individual directories for details, but a high-level description is:
- The python code uses pyjulia to instantiate a Julia interpreter, see the
pythondirectory for details - The driving environment is then built in Julia, see the
juliadirectory for details - Each time the environment is stepped forward, execution passes from python to julia, updating the environment

