This repository contains the package that was used to demo and test the depth_yolact_ros package.
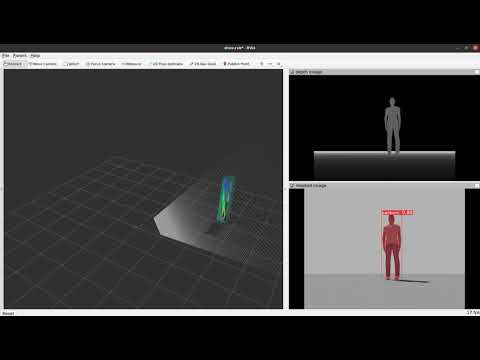
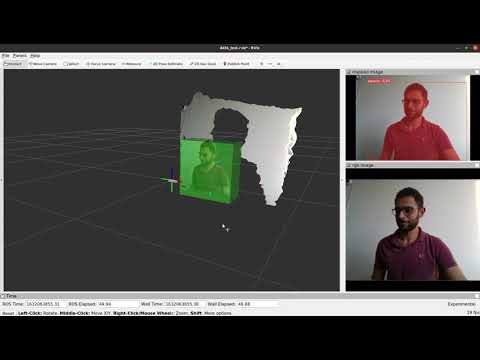
The two launch files in launch folder were used to recored the videos, one launches a gazebo simulation with random positioned people around a turtlebot3 (Burger model) with an Intel D435 camera on it. The second one is me sitting in front of a D435i camera showing the package working in realtime.
depth_yolact_ros: The actual ROS package.
yolact_ros_msgs: Provides messages for publishing the detection results.