



Videos : FAST-LIO-SAM Bilibili_link
1.FAST-LIO2为紧耦合的lio slam系统,因其缺乏前端,所以缺少全局一致性,参考lio_sam的后端部分,接入GTSAM进行后端优化。
2.FAST_LIO_SLAM的作者kim在FAST-LIO2的基础上,添加SC-PGO模块,通过加入ScanContext全局描述子,进行回环修正,SC-PGO模块与FAST-LIO2解耦,非常方便,很优秀的工作。
3.FAST_LIO_LC的作者yanliang-wang,在FAST_LIO_SLAM的基础上添加了:1.基于Radius Search 基于欧式距离的回环检测搜索,增加回环搜索的鲁棒性;2.回环检测的优化结果,更新到FAST-LIO2的当前帧位姿中,幷进行ikdtree的重构,进而更新submap。
FAST_LIO_SAM的主要贡献:
1.对比FAST_LIO_SLAM 与 FAST_LIO_LC 使用外部接入的PGO回环检测模块进行后端优化 ,FAST_LIO_SAM 将LIO-SAM的后端GTSAM优化部分移植到FAST-LIO2的代码中,数据传输处理环节更加清晰。
2.增加关键帧的保存,可通过rosservice的指令对地图和轨迹进行保存。
3.FAST_LIO_SLAM中的后端优化,只使用了GPS的高层进行约束,GPS的高层一般噪声比较大,所以添加GPS的XYZ三维的postion进行GPS先验因子约束。
- Ubuntu 18.04 and ROS Melodic
- PCL >= 1.8 (default for Ubuntu 18.04)
- Eigen >= 3.3.4 (default for Ubuntu 18.04)
- GTSAM >= 4.0.0(tested on 4.0.0-alpha2)
cd YOUR_WORKSPACE/src
git clone https://github.com/kahowang/FAST_LIO_SAM.git
cd ..
catkin_makeVideos : FAST-LIO-SAM' videos
dataset is from yanliang-wang 's FAST_LIO_LC ,dataset which includes /velodyne_points(10Hz) and /imu/data(400Hz).
roslaunch fast_lio_sam mapping_velodyne16.launch
rosbag play T3F2-2021-08-02-15-00-12.bag

dataset is from LIO-SAM Walking dataset: [Google Drive]
Videos : FAST-LIO-SAM' videos
roslaunch fast_lio_sam mapping_velodyne16_lio_sam_dataset.launch
rosbag play walking_dataset.bag

输入如下指令到terminal中,地图文件将会保存在应文件夹中
rosservice call /save_map "resolution: 0.0
destination: ''"
success: True输入如下指令到terminal中,poes文件将会保存在相应文件夹中
rosservice call /save_pose "resolution: 0.0
destination: ''"
success: Falseevo 绘制轨迹
evo_traj kitti optimized_pose.txt without_optimized_pose.txt -p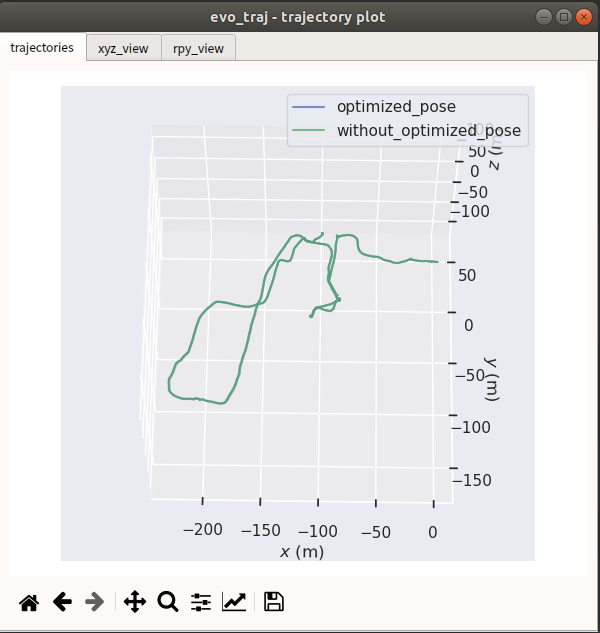 |
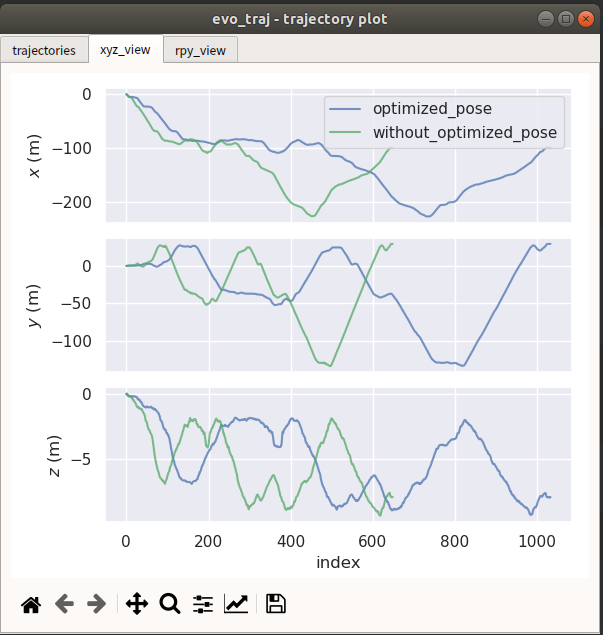 |
|---|
# Loop closure
loopClosureEnableFlag: true # use loopclousre or not
loopClosureFrequency: 4.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 1.5 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 20 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# visual iktree_map
visulize_IkdtreeMap: true
# visual iktree_map
recontructKdTree: true
savePCDDirectory: "/fast_lio_sam_ws/src/FAST_LIO_SAM/PCD/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementationdataset is from LIO-SAM Park dataset: [Google Drive]
Videos : FAST-LIO-SAM' videos
roslaunch fast_lio_sam mapping_velodyne16_lio_sam_parking_dataset.launch
rosbag play parking_dataset.bagLine Color define: path_no_optimized(blue)、path_updated(red)、path_gnss(green)


输入如下指令到terminal中,地图文件将会保存在应文件夹中
rosservice call /save_map "resolution: 0.0
destination: ''"
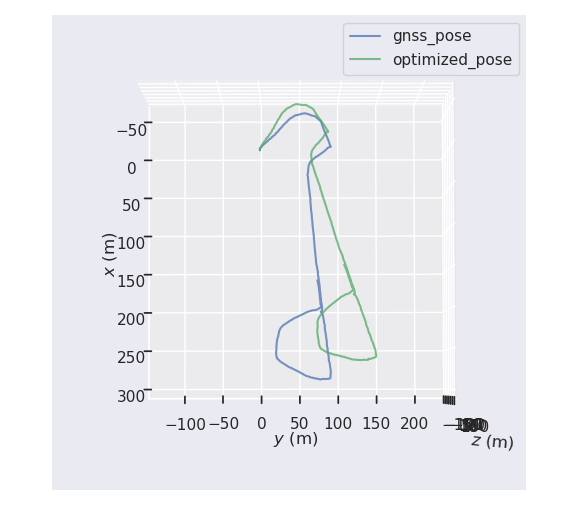
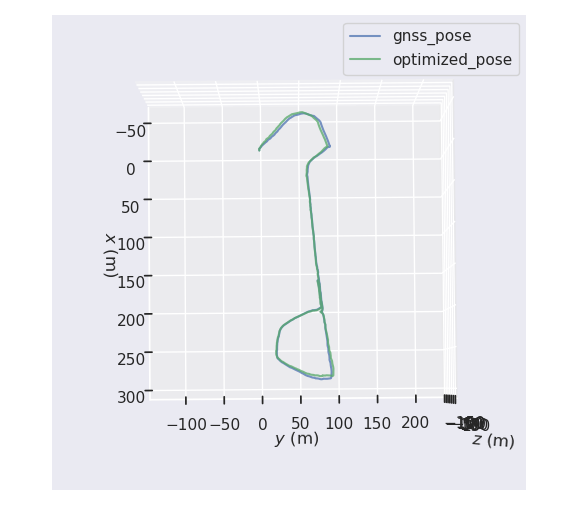
success: TrueFAST-LIO Map (no gnss prior factor) Red ; FAST-LIO-SAM (with gnss prior factor) Blue

输入如下指令到terminal中,poes文件将会保存在相应文件夹中
rosservice call /save_pose "resolution: 0.0
destination: ''"
success: False
evo 绘制轨迹
evo_traj kitti gnss_pose.txt optimized_pose.txt -p
| FAST-LIO (no gnss prior factor) | FAST-LIO-SAM (with gnss prior factor) |
|---|---|
 |
 |
# GPS Settings
useImuHeadingInitialization: false # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 0 #25.0 # m^2, threshold for using GPS data 位姿协方差阈值 from isam2when you want to see the path in the Map [satellite map](http://dict.youdao.com/w/satellite map/#keyfrom=E2Ctranslation),you can also use Mapvizp plugin . You can refer to my blog on CSDN.


1.FAST-LIO2中对pose姿态是使用so3表示,而gtsam中,输入的relative_pose姿态是Euler RPY形式表示,需要使用罗德里格斯的公式进行转换更新。
2.参考yanliang-wang FAST-LIO-LC中的iktree reconstruct
3.在walking数据集中,因为有个别数据是在同一个地方不断手持旋转激光雷达,旋转激光雷达的角度达到了保存关键帧的阈值,在短时间内,保存了多帧相似的关键帧,导致ISAM2出现特征退化,进而里程计跑飞,可以根据数据集的情况适当调整关键帧选取的阈值参数。
4.添加GPS prior 先验因子的部分diamante,参考lio_sam的先验因子部分,对比于kim的FAST-LIO-SLAM,FAST-LIO-SLAM中只是用了GPS的高层约束,并没有使用xy方向的约束,而GPS在高层(Z轴)的误差比较大,优化过程中容易引入误差。
5.GPS先验因子中,**"useGpsElevation"**是否选择GPS的高层约束,默认不使用,因为GPS的高层噪声比较大。
6.LIO-SAM 中使用ekf_localization_node这个ROS Package 把GPS的WGS84 坐标系 转到 World系下,FAST-LIO-SAM考虑到尽量与外部的ROS package 解耦,调用 GeographicLib进行坐标转换。
1.GNSS的经纬高噪声协方差没有转换到World系下,暂时使用latitude longtitude 的cov noise 作为x y 向的cov nosie
2.应该使用的是ENU坐标系,但是使用GeographicLib转换后的结果得到的坐标系是NED坐标系下的,原因暂时没捋清楚,待解决。(X: E Y: N Z: -D )
根据网友的运行和提示,进行了代码的一些bug更新与修改,更新日志如下,欢迎大家多提issues,感谢大家~
https://github.com/kahowang/FAST_LIO_SAM/blob/master/%E6%9B%B4%E6%96%B0%E6%97%A5%E5%BF%97.md
If you use this repository in your academic research, a BibTeX citation is appreciated:
@misc{wang2022fast_lio_sam,
title={FAST-LIO-SAM: FAST-LIO with Smoothing and Mapping.},
author={Wang, Jiahao},
howpublished={\url{https://github.com/kahowang/FAST_LIO_SAM}},
year={2022}
}
or, you can add a footnote link of this repository:
https://github.com/kahowang/FAST_LIO_SAM
In this project, the LIO module refers to FAST-LIO and the pose graph optimization refers to FAST_LIO_SLAM and LIO_SAM.The mainly idea is for FAST_LIO_LC.Thanks there great work .
Also thanks yanliang-wang、minzhao-zhu、peili-ma 's great help .
edited by kaho 2022.6.20