Issues in DIB-R rasterization
Ligo04 opened this issue · 3 comments
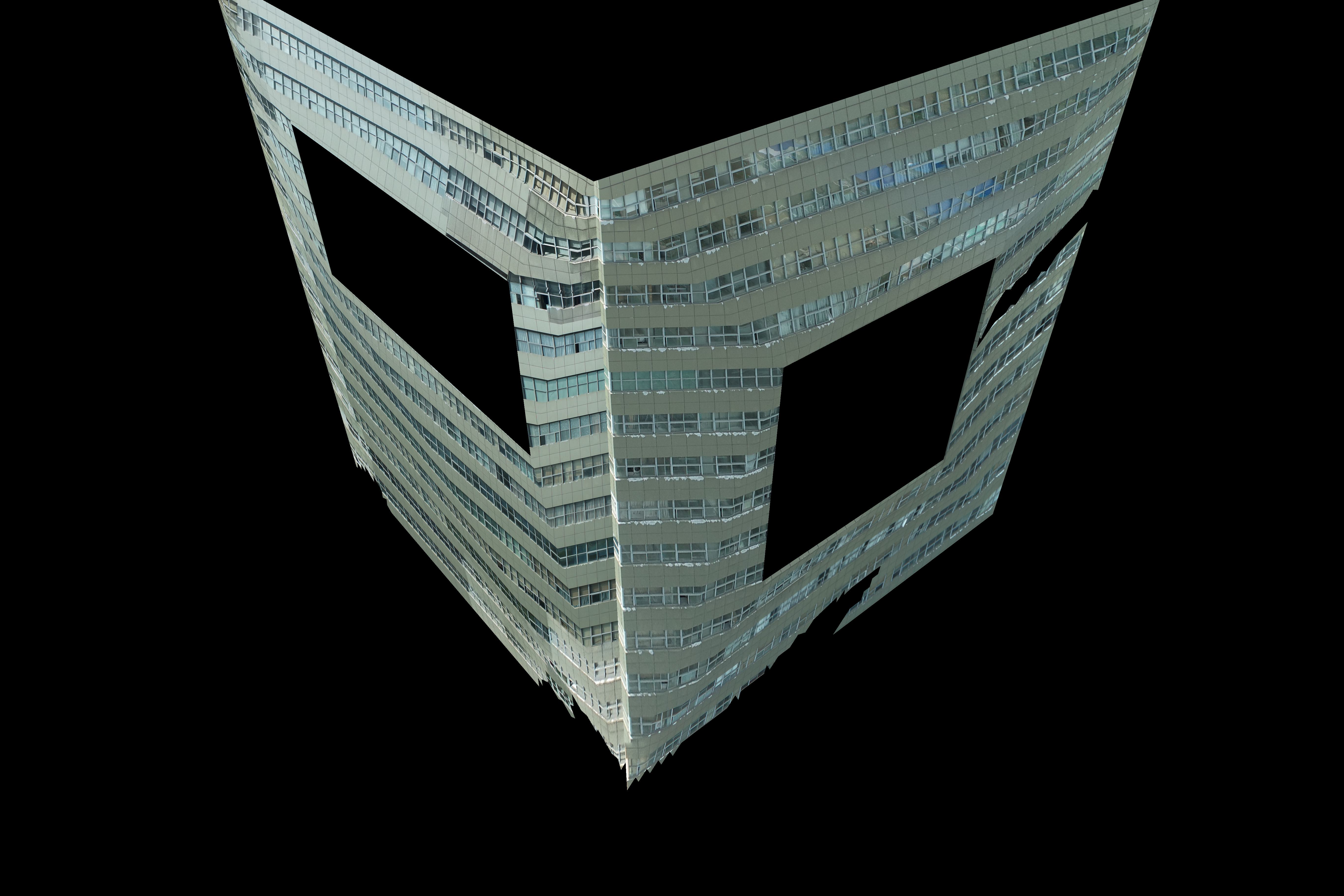
I am rendering the two facades of the building obj with textures, and I have encountered some problems, such as the four vertices in the middle black area on the right are obviously wrong, and I feel that the depth value does not work, and there is no perspective effect (near large and far small), I Wondering why this is, the camera is defined with a PinholeIntrinsics with a custom focal length.Here is the code reference:
def render(camera:kaolin.render.camera.Camera):
vertices_cam = camera.extrinsics.transform(mesh.vertices) # world-> camera
vertices_img = camera.intrinsics.transform(vertices_cam)[...,0:2] # camera -> ndc
# pre face
face_vertices_camera = kaolin.ops.mesh.index_vertices_by_faces(vertices_cam, mesh_faces)
face_vertices_img = kaolin.ops.mesh.index_vertices_by_faces(vertices_img,mesh_faces)
# normal
face_normal_z= kaolin.ops.mesh.face_normals(face_vertices_camera,unit=True)
# uv
mesh_faces_uv = kaolin.ops.mesh.index_vertices_by_faces(mesh.uvs,mesh_face_uvs_idx[0])
face_attributes = mesh_faces_uv
texture_coords,softmask,face_idx = kaolin.render.mesh.dibr_rasterization(camera.height,camera.width,face_vertices_camera[:,:,:,-1],
face_vertices_img,face_attributes,face_normal_z,
rast_backend='cuda')
softmask = torch.flip(softmask,dims=(2,)) # filp width
texture_coords = torch.flip(texture_coords,dims=(2,))
face_idx = torch.flip(face_idx,dims=(2,))
hard_mask = (face_idx > -1)[..., None]
in_material_idx = mesh_material_assignments[0,...][face_idx]
in_material_idx[face_idx == -1] = -1
# result image
img = torch.zeros((1,camera.height,camera.width,3), dtype=torch.float, device='cuda')
for i,material in enumerate(materials):
mask = in_material_idx == i
# dense
_texcoords = torch.where(mask.unsqueeze(3), texture_coords, torch.tensor(0.0).cuda())
if _texcoords[_texcoords>0].shape[0] > 0:
print(f'material {i}')
pixel_val = kaolin.render.mesh.texture_mapping(_texcoords.contiguous(),
material.permute(0,3,1,2).contiguous(),mode='bilinear') # origin point in left-down side
img[mask] = pixel_val[mask]
return torch.clamp(img * hard_mask,0.0,1.0)Hi @Ligo04 , I can't see your image for some reason. currently our dibr_rasterization method is lacking perspective correction so I would suggest to use nvdiffrast which our camera API is fully compatible with. See an example here: https://github.com/NVIDIAGameWorks/kaolin/blob/master/examples/tutorial/interactive_visualizer.ipynb
Hi @Ligo04 , I can't see your image for some reason. currently our
dibr_rasterizationmethod is lacking perspective correction so I would suggest to use nvdiffrast which our camera API is fully compatible with. See an example here: https://github.com/NVIDIAGameWorks/kaolin/blob/master/examples/tutorial/interactive_visualizer.ipynb您好,由于某种原因我看不到您的图片。目前我们的dibr_rasterization方法缺乏透视校正,因此我建议使用与我们的相机 API 完全兼容的 nvdiffrast。请参阅此处的示例:https://github.com/NVIDIAGameWorks/kaolin/blob/master/examples/tutorial/interactive_visualizer.ipynb
OK. Thanks! I haved used the nvdiffrast some time.