github:https://github.com/ActivePeter/carLineDetect
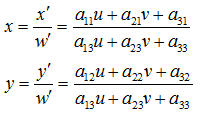
getPerspectiveTransform 通过该函数可以将图像变换到正交视图下,可以排除一部分路面外的干扰,并且易于分析曲率。
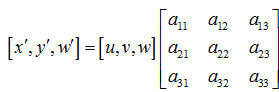
u,v是原始图片左边,对应得到变换后的图片坐标x,y,其中。
变换矩阵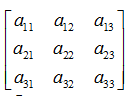



所以可以理解成仿射等是透视变换的特殊形式。经过透视变换之后的图片通常不是平行四边形(除非映射视平面和原来平面平行的情况)。
重写之前的变换公式可以得到:
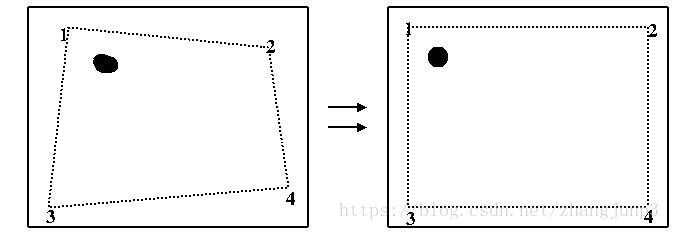
所以,已知变换对应的几个点就可以求取变换公式。反之,特定的变换公式也能新的变换后的图片。简单的看一个正方形到四边形的变换:

根据变换公式得到:
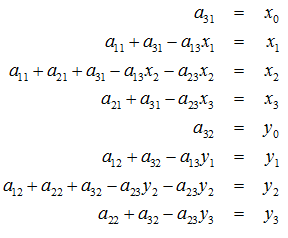
定义几个辅助变量:


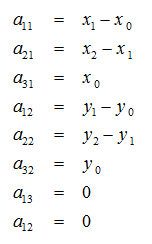


求解出的变换矩阵就可以将一个正方形变换到四边形。反之,四边形变换到正方形也是一样的。于是,我们通过两次变换:四边形变换到正方形+正方形变换到四边形就可以将任意一个四边形变换到另一个四边形。
1.创建映射点数组
Point2f src_vertices[4];//从原图中选择出需要识别的透视区域,用于变换
src_vertices[0] = Point(src.size().width/2-halfFarW,H1);
src_vertices[1] = Point(src.size().width/2+halfFarW, H1);
src_vertices[2] = Point(src.size().width/2-halfCloseW, H2);
src_vertices[3] = Point(src.size().width/2+halfCloseW, H2);
Point2f dst_vertices[4];//设置透视区域变换后的区域
dst_vertices[0] = Point(200, 0)+Point(20, 20);
dst_vertices[1] = Point(640, 0)+Point(20, 20);
dst_vertices[2] = Point(200, 1080);
dst_vertices[3] = Point(640, 1080);2.透视变换
Mat M = getPerspectiveTransform(src_vertices, dst_vertices);//透视变换矩阵
Mat dst(1080, 840, CV_8UC3);//变换后的区域
Mat binery,lab,gray,grayToBinary,hls;
warpPerspective(src, dst, M, dst.size(), INTER_LINEAR, BORDER_CONSTANT);//变换仅考虑一般路面容易出现的黄色线和白色线,黄色线使用lab色域进行筛选,白色线使用rgb或hls色域进行筛选。
inRange(hls, Scalar(0, 232, 150), Scalar(255, 255, 255), binery);
使用inrange函数可以实现对颜色在三个维度内的筛选,并且二值化。
1.创建不同色域图片变量
Mat binery,lab,gray,grayToBinary,hls;2.转换色域
cvtColor(dst, gray, COLOR_BGR2GRAY);//获取灰度图
cvtColor(dst, lab, cv::COLOR_BGR2Lab);//获取lab图
cvtColor(dst, hls, cv::COLOR_BGR2HLS);3.二值化
inRange(hls, Scalar(0, 232, 150), Scalar(255, 255, 255), binery);findContours
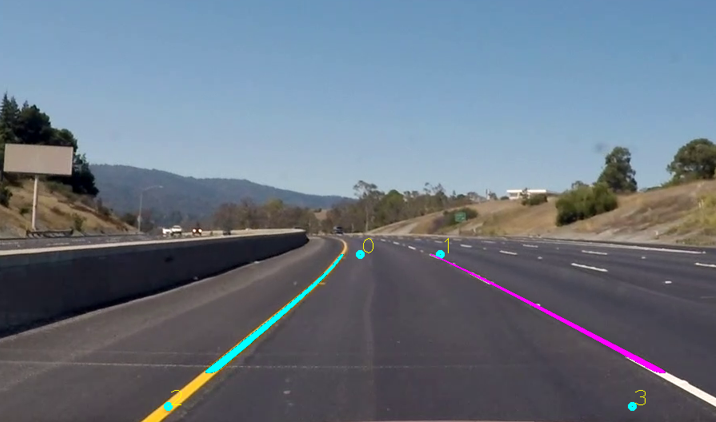
使用findContours函数可以寻找色块的轮廓。根据轮廓组成的点,我们可以提取出色块线条的大致点序列。以便用于后面的拟合
std::vector<std::vector<Point> > vec_p;
std::vector<Vec4i> vec_4f;
findContours(binery, vec_p, vec_4f,CV_RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
std::vector<Point> keyPoints;//储存经过过滤的 线段的关键顶点,用于拟合
for(int i=0;i<vec_p.size();i++){
if(fabs(arcLength(vec_p.at(i),true)) > 216){//周长限制
Point max=vec_p.at(i).at(0);
Point min=vec_p.at(i).at(0);
for(int j=1;j<vec_p.at(i).size();j++){//寻找端点
if(vec_p.at(i).at(j).y>max.y){
max=vec_p.at(i).at(j);
}
if(vec_p.at(i).at(j).y<min.y){
min=vec_p.at(i).at(j);
}
}
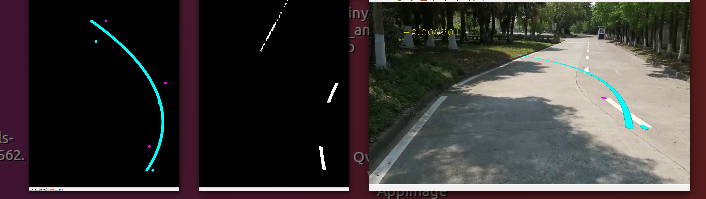
if((max.x-min.x)*(max.x-min.x)+(max.y-min.y)*(max.y-min.y)>8000){//长度限制
circle(dst2, min, 7, Scalar(255, 0, 255), CV_FILLED, CV_AA);
circle(dst2, max, 7, Scalar(255, 255, 0), CV_FILLED, CV_AA);
// keyPoints.push_back(max);
// keyPoints.push_back(min);
keyPoints.push_back(Point(max.y,max.x));
keyPoints.push_back(Point((min.y+max.y)/2,(min.x+max.x)/2));
keyPoints.push_back(Point(min.y,min.x));
}
//drawContours(dst2, vec_p,i, Scalar(255, 255, 100),23);
}
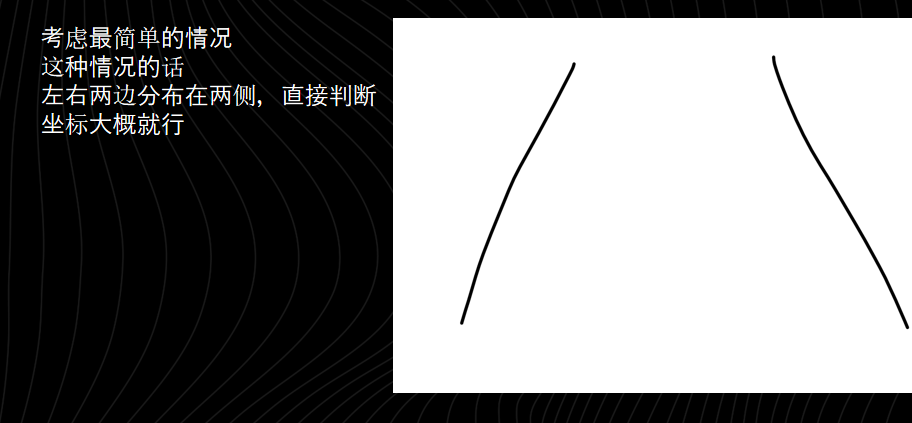
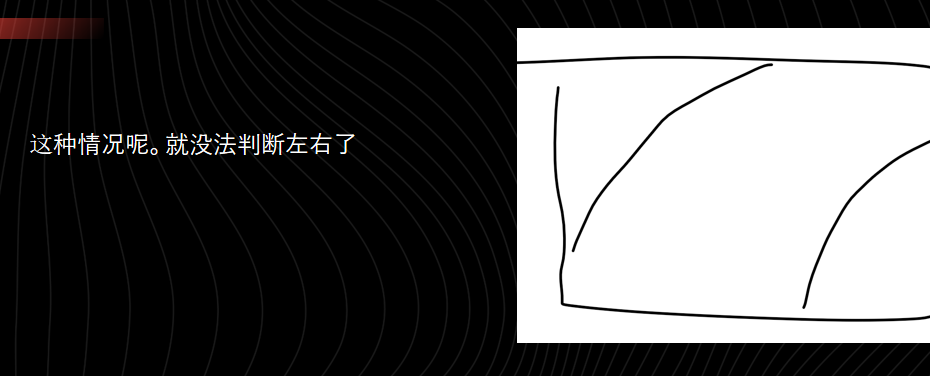
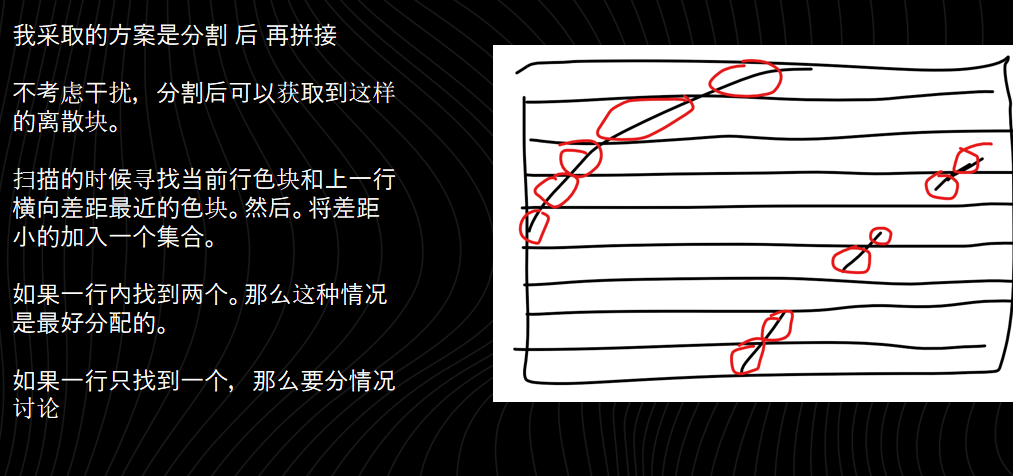
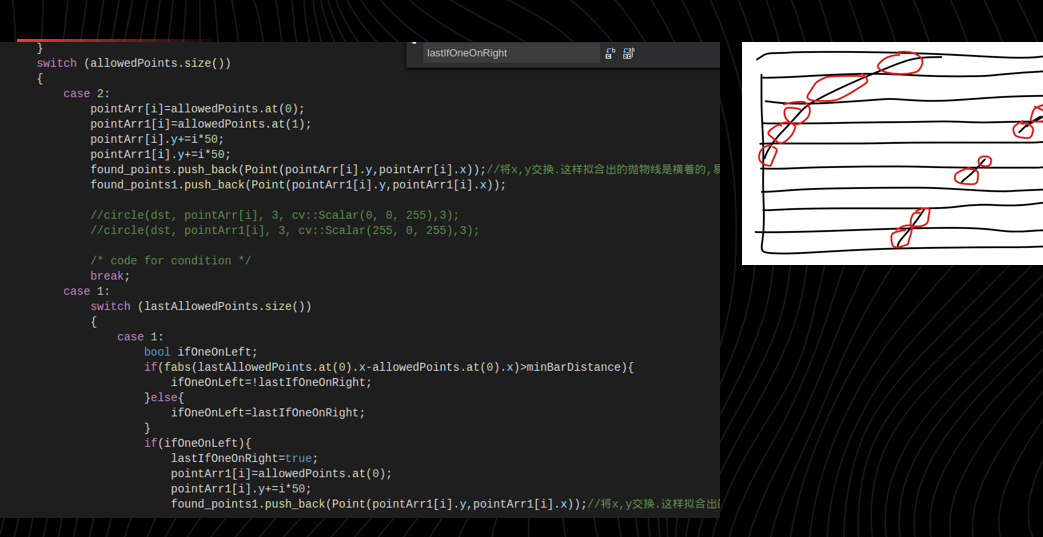
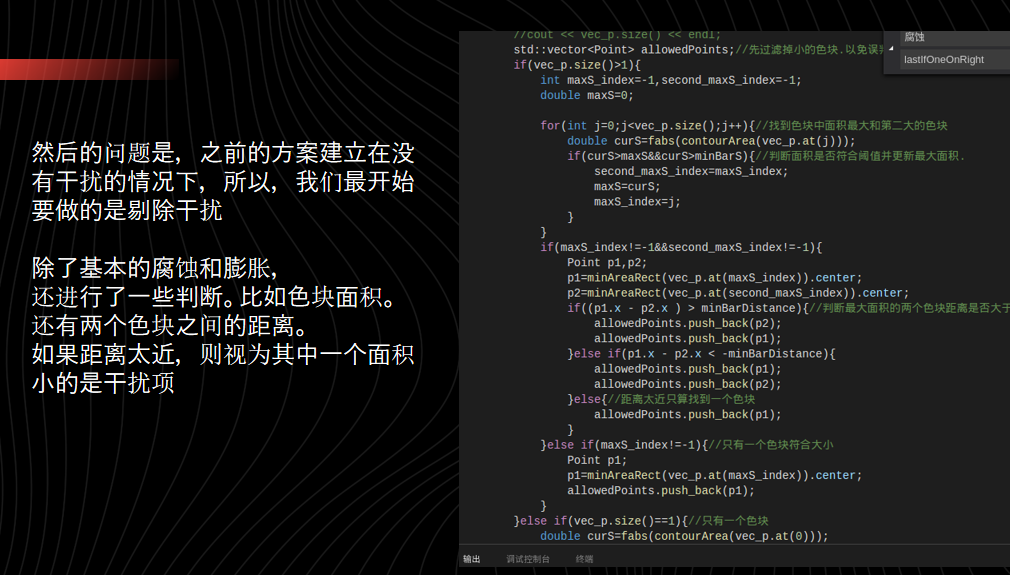
}遍历中根据相邻距离。区分色块是否为同一车道线
由于后面测试视频中色块过于离散,我还没有能力实现作区分的算法。
原来的视频中是实现了的。
基本原理:幂函数可逼近任意函数。
上式中,N表示多项式阶数,实际应用中一般取3或5;
假设N=5,则:

共有6个未知数,仅需6个点即可求解;
可表示为矩阵方程:

Y的维数为[R*1],U的维数[R * 6],K的维数[6 * 1]。
R> 6时,超定方程求解:

Mat polyfit(vector<Point>& in_point, int n)//
{
int size = in_point.size();
//所求未知数个数
int x_num = n + 1;
//构造矩阵U和Y
Mat mat_u(size, x_num, CV_64F);
Mat mat_y(size, 1, CV_64F);
for (int i = 0; i < mat_u.rows; ++i)
for (int j = 0; j < mat_u.cols; ++j)
{
mat_u.at<double>(i, j) = pow(in_point[i].x, j);
}
for (int i = 0; i < mat_y.rows; ++i)
{
mat_y.at<double>(i, 0) = in_point[i].y;
}
//矩阵运算,获得系数矩阵K
Mat mat_k(x_num, 1, CV_64F);
mat_k = (mat_u.t()*mat_u).inv()*mat_u.t()*mat_y;
//cout << mat_k << endl;
return mat_k;
}
for (int i = keyPoints.back().x; i < keyPoints.front().x; ++i)
{
Point2d ipt;
ipt.y = i;
ipt.x = 0;
for (int j = 0; j < n + 1; ++j)
{
ipt.x += mat_k.at<double>(j, 0)*pow(i,j);
}
if(i!=keyPoints.front().x){//weifen,用于曲率计算
double dy=ipt.x-lasty;
if(i!=keyPoints.front().x+1){
double ddy=dy-lastdy;
theata+=ddy/pow((1+dy*dy),3/2);
theata_count++;
}
lastdy=dy;
}
lasty=ipt.x;
circle(dst2, ipt, 7, Scalar(255, 255, 0), CV_FILLED, CV_AA);
//circle(lab, pointArr[i], 3, cv::Scalar(0, 255, 0),3);
}每遍历一个点和上一个点作差,即为y',此次求得的y‘和上一次求得的y’作差,即为y‘’,每次遍历可以计算一次,求和并且计数,最后在循环外取平均即可。
现将线条绘制到一张透视变换后一样大的黑色图里,将其逆透视变换回原图。然后在创建一个他的拷贝并进行二值化用于作为遮罩。然后使用二值化图对其进行剔除来绘制到原图
Mat M2 = getPerspectiveTransform(dst_vertices, src_vertices);//用于变换回原图
warpPerspective(dst2, mask, M2, mask.size(), INTER_LINEAR, BORDER_CONSTANT);//变换
Mat binary2;
cvtColor(mask, binary2, CV_BGR2GRAY);//转黑白
//imshow("binary2", binary2);
threshold(binary2,binary2, 50, 255, THRESH_BINARY);//二值化
mask.copyTo(src,binary2);//剔除遮罩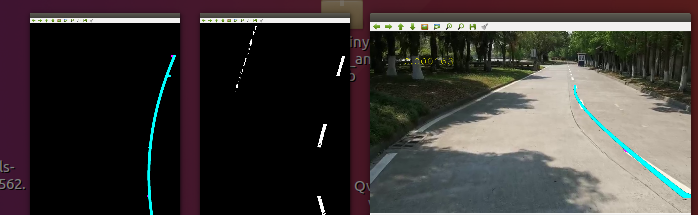
未实现区分较为离散的车道线算法。
#include "ros/ros.h"
#include "std_msgs/String.h"
#include<cv_bridge/cv_bridge.h>
#include<sensor_msgs/image_encodings.h>
#include<image_transport/image_transport.h>
#include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui.hpp>
#include<opencv2/imgproc/imgproc.hpp>
#include <sstream>
using namespace cv;
using namespace std;
/**
* This tutorial demonstrates simple sending of messages over the ROS system.
*/
int main(int argc, char *argv[])
{
/**
* The ros::init() function needs to see argc and argv so that it can perform
* any ROS arguments and name remapping that were provided at the command line.
* For programmatic remappings you can use a different version of init() which takes
* remappings directly, but for most command-line programs, passing argc and argv is
* the easiest way to do it. The third argument to init() is the name of the node.
*
* You must call one of the versions of ros::init() before using any other
* part of the ROS system.
*/
ros::init(argc, argv, "videoShow_pub");
/**
* NodeHandle is the main access point to communications with the ROS system.
* The first NodeHandle constructed will fully initialize this node, and the last
* NodeHandle destructed will close down the node.
*/
ros::NodeHandle n;
/**
* The advertise() function is how you tell ROS that you want to
* publish on a given topic name. This invokes a call to the ROS
* master node, which keeps a registry of who is publishing and who
* is subscribing. After this advertise() call is made, the master
* node will notify anyone who is trying to subscribe to this topic name,
* and they will in turn negotiate a peer-to-peer connection with this
* node. advertise() returns a Publisher object which allows you to
* publish messages on that topic through a call to publish(). Once
* all copies of the returned Publisher object are destroyed, the topic
* will be automatically unadvertised.
*
* The second parameter to advertise() is the size of the message queue
* used for publishing messages. If messages are published more quickly
* than we can send them, the number here specifies how many messages to
* buffer up before throwing some away.
*/
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
/**
* A count of how many messages we have sent. This is used to create
* a unique string for each message.
*/
// 定义节点句柄
image_transport::ImageTransport it(n);
image_transport::Publisher image_pub = it.advertise("video_image", 1);
sensor_msgs::ImagePtr msg;
// opencv准备读取视频
VideoCapture video;
video.open("/home/pa/slam_study_on_linux/car_video3.mp4");
if( !video.isOpened() )
{
ROS_INFO("Read Video failed!\n");
return 0;
}
Mat frame;
int count = 0;
while (ros::ok())
{
/**
* This is a message object. You stuff it with data, and then publish it.
*/
//std_msgs::String msg;
video >> frame;
if( frame.empty() )
break;
//resize(frame, frame, Size(1280,1280*frame.rows/frame.cols));
msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", frame).toImageMsg();
//cv::imshow("view", frame);
//waitKey(1);
std::stringstream ss;
cout << "frame size:"<<frame.rows<<" "<<frame.cols << endl;
//msg.data = ss.str();
//ROS_INFO("%s","hhhh");
/**
* The publish() function is how you send messages. The parameter
* is the message object. The type of this object must agree with the type
* given as a template parameter to the advertise<>() call, as was done
* in the constructor above.
*/
image_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}2。视频的订阅并调用回调处理
int main(int argc, char *argv[])
{
/**
* The ros::init() function needs to see argc and argv so that it can perform
* any ROS arguments and name remapping that were provided at the command line.
* For programmatic remappings you can use a different version of init() which takes
* remappings directly, but for most command-line programs, passing argc and argv is
* the easiest way to do it. The third argument to init() is the name of the node.
*
* You must call one of the versions of ros::init() before using any other
* part of the ROS system.
*/
ros::init(argc, argv, "videoShow_sub");
/**
* NodeHandle is the main access point to communications with the ROS system.
* The first NodeHandle constructed will fully initialize this node, and the last
* NodeHandle destructed will close down the node.
*/
ros::NodeHandle n;
//ros::spin();
cv::namedWindow("view");
cv::startWindowThread();
image_transport::ImageTransport it(n);
image_transport::Subscriber sub = it.subscribe("video_image", 1, imageCallback);
ros::spin();
cv::destroyWindow("view");
return 0;
}