This is a project for LiDAR to camera joint calibration[paper]. For more calibration codes, please refer to the link SensorsCalibration
- Cmake
- Opencv 2.4.13
- PCL 1.9
Compile in their respective folders
# mkdir build
mkdir -p build && cd build
# build
cmake .. && make-
Two Input files:
./lidar2camera camera_dir csv_file
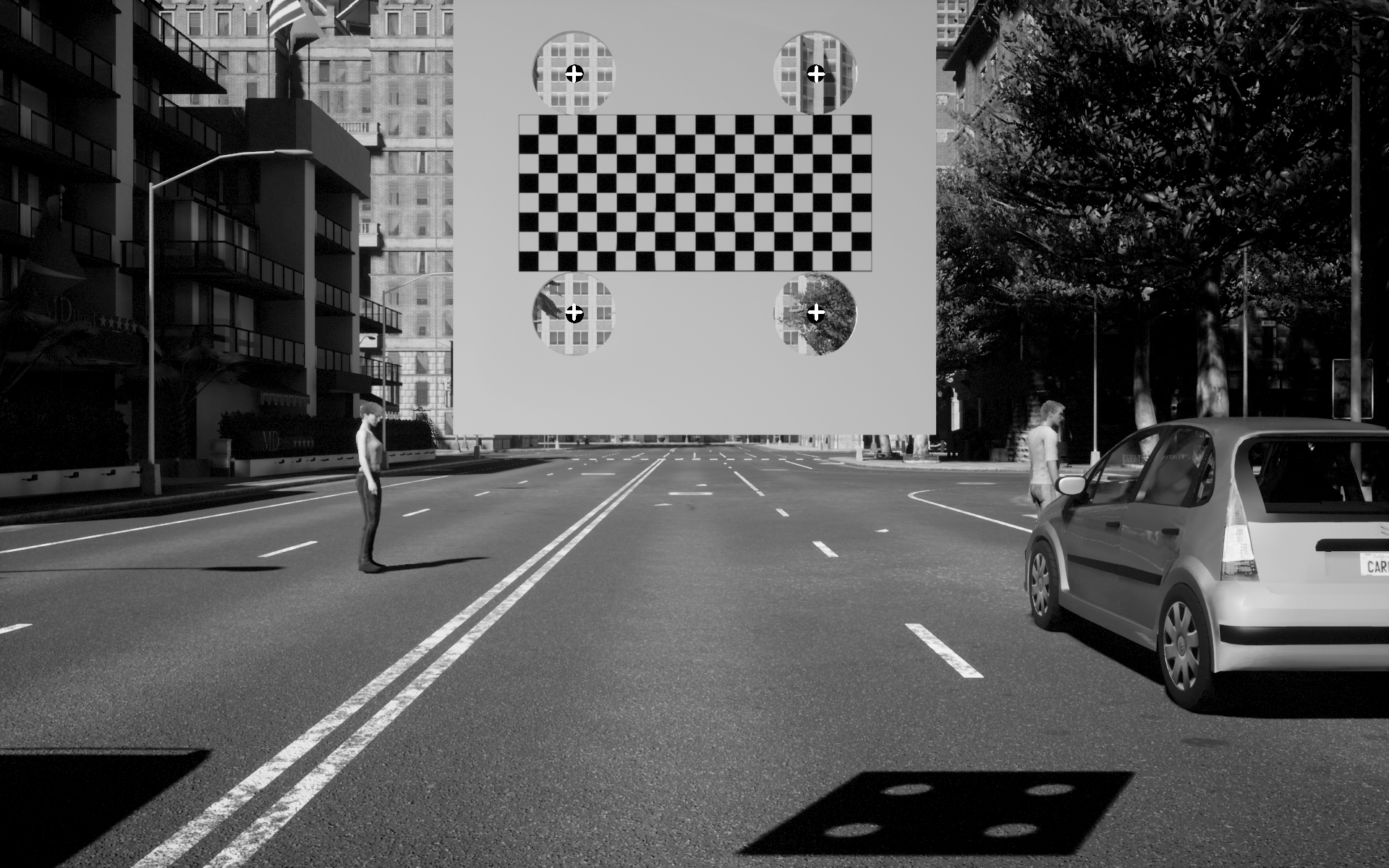
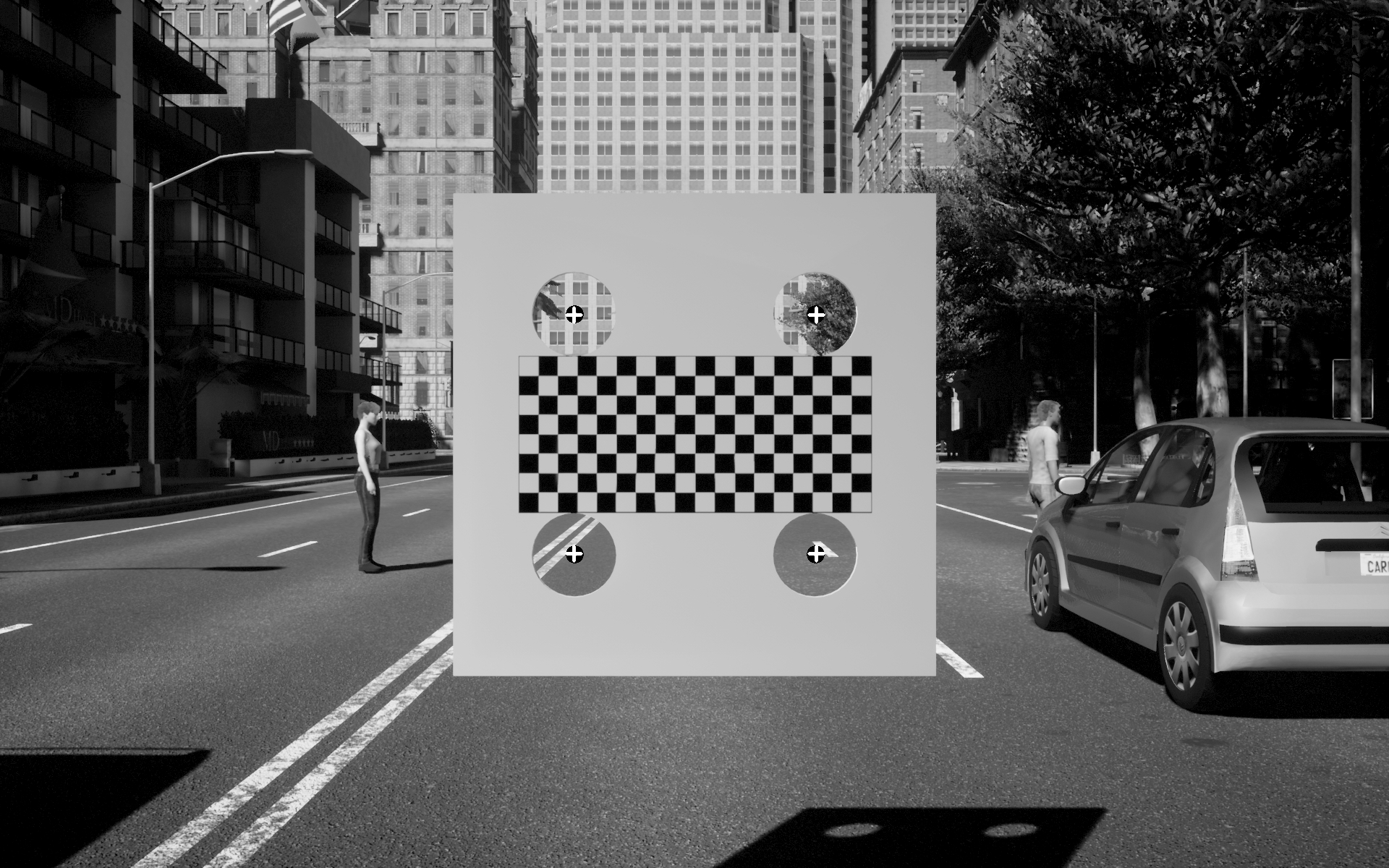
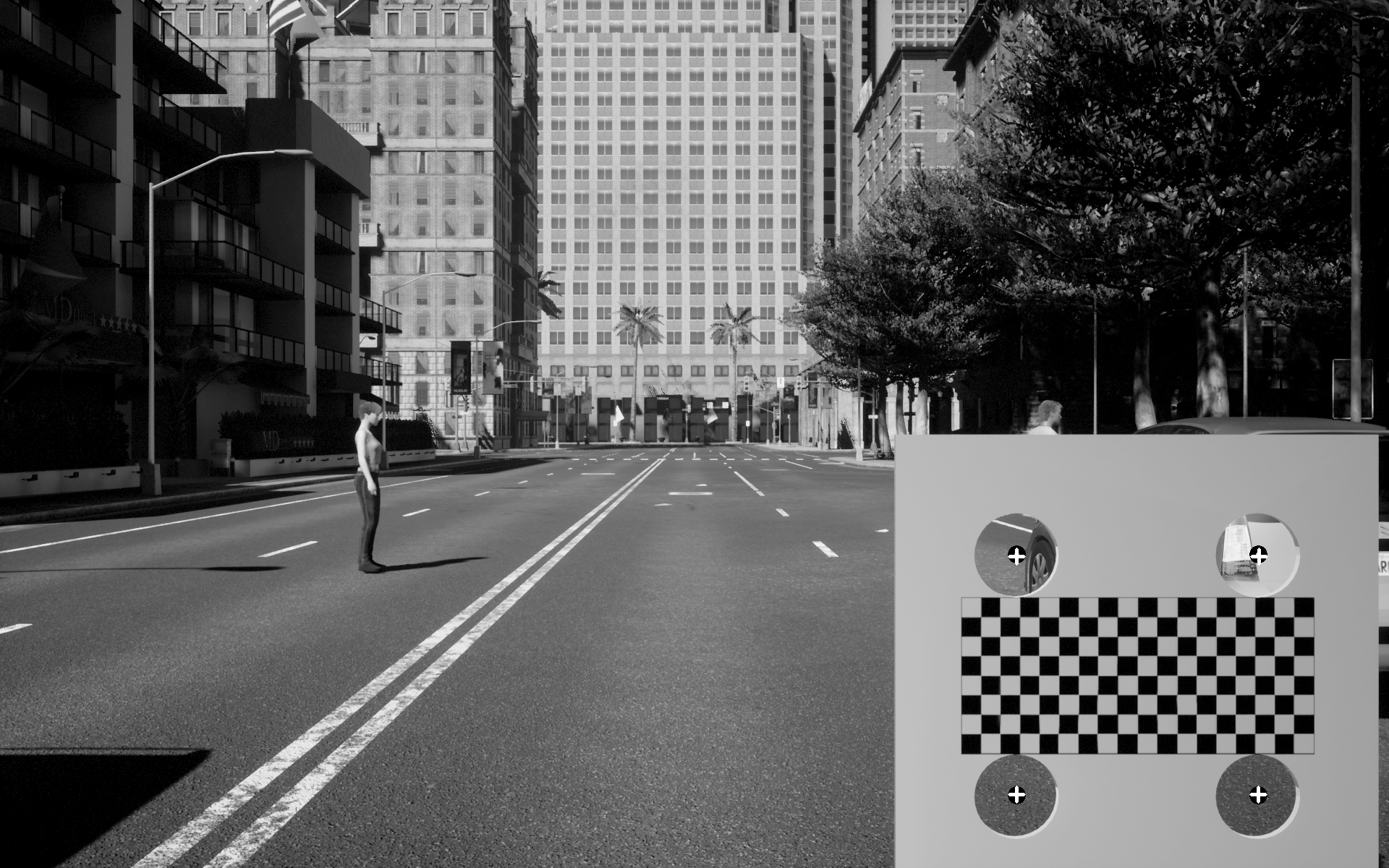
- camera_dir: Collected camera calibration board data
- csv_file: The circles center points corresponding to the images
Note: To extract the circles center form PCD files, please refer to README.md.
-
Run the test sample:
The executable file is under the bin folder.
cd ~./lidar2camera/joint_calib ./bin/lidar2camera data/intrinsic/ data/circle.csv -
Calibration result:





The code is developed based on camera calibration cpp