This is a project for LiDAR to pose-sensor calibration [paper]. Note: Some code based on octree fine-tuning and z-axis correction has been removed temporarily due to some ownership and data protection policies. The removed part of the code is easy to implement; you can refer to the paper to implement it yourself. For more calibration codes, please refer to the link SensorsCalibration
- Cmake
- opencv 2.4
- eigen 3
- PCL 1.9
- Pangolin
# mkdir build
mkdir -p build && cd build
# build
cmake .. && makeThis automatic and user-friendly calibration tool is for calibrating the extrinsic parameter of LiDAR and pose-sensor in road scenes.
According to the figure below for data collection, the calibration vehicle records IMU and LiDAR data.
- Ensure that the ground is sufficiently flat
- Ensure that there are enough features around, such as walls, lane lines, poles, stationary vehicles, etc.
- The calibrated vehicle circulates three times according to the trajectory shown in the figure below, and the vehicle speed is maintained at 10km/h.
- Try not to have dynamic objects around, such as vehicles, etc.

-
Run the test sample:
The executable file is under the bin folder.
cd ~./auto_calib/ ./bin/run_lidar2imu data/top_center_lidar/ data/NovAtel-pose-lidar-time.txt data/gnss-to-top_center_lidar-extrinsic.jsonNote: Because the data is relatively large, only part of the data is uploaded, the complete data can be downloaded from the link below.
Link (链接): https://pan.baidu.com/s/1AODTuqhmgwbRWxGGCmo0iA Extraction code (提取码): 94id -
Calibration result:
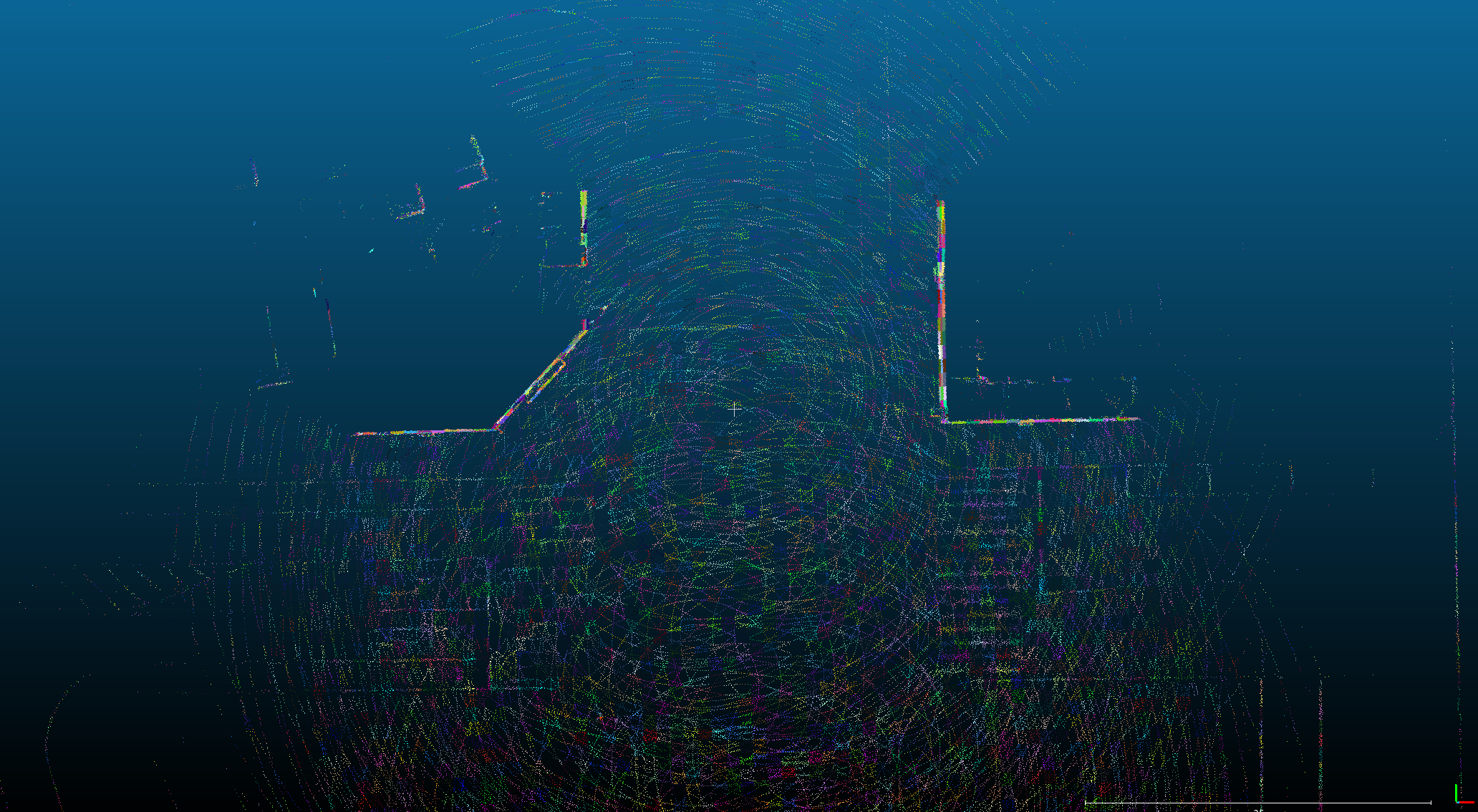
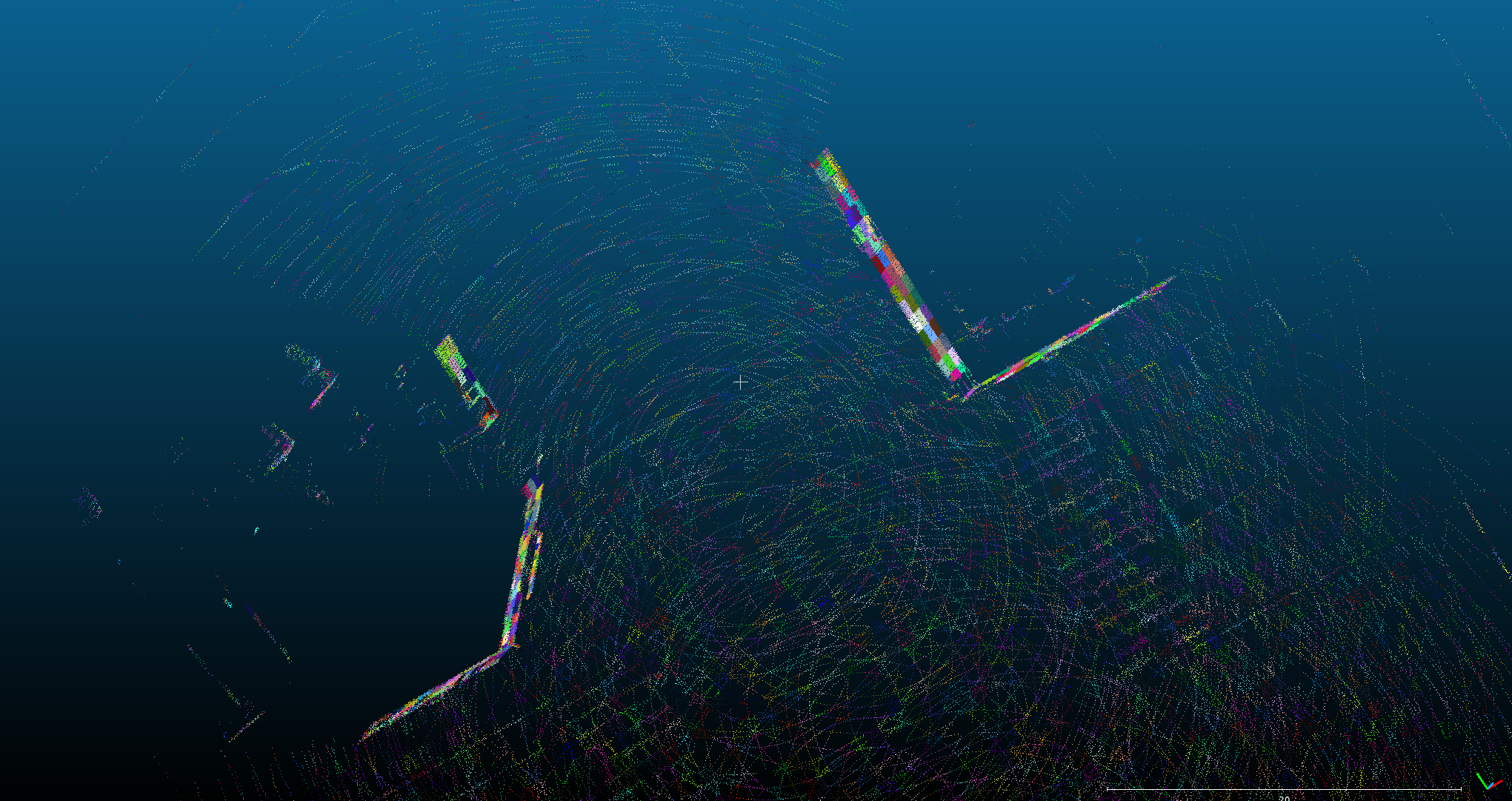
comparison before and after calibration:
before calibration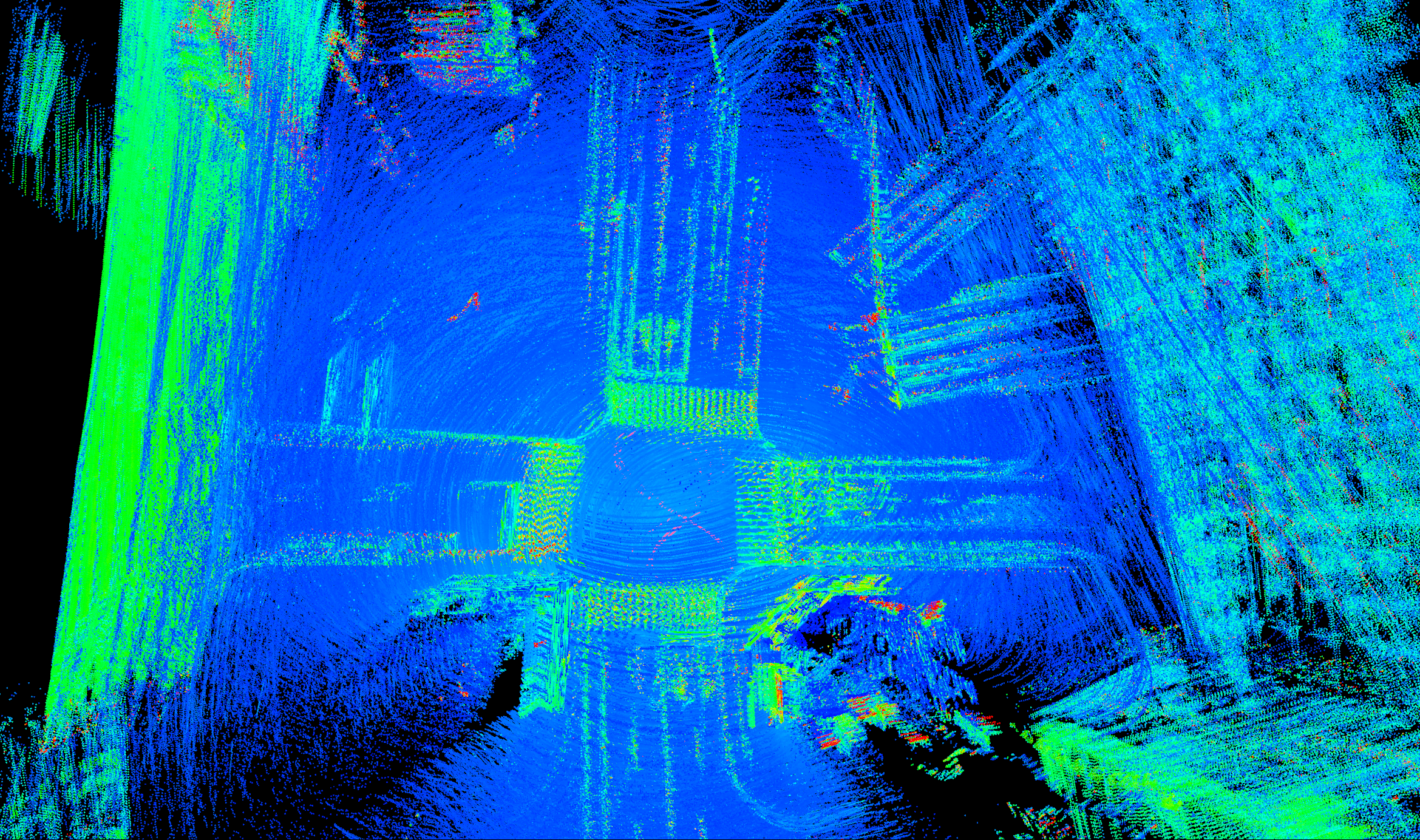
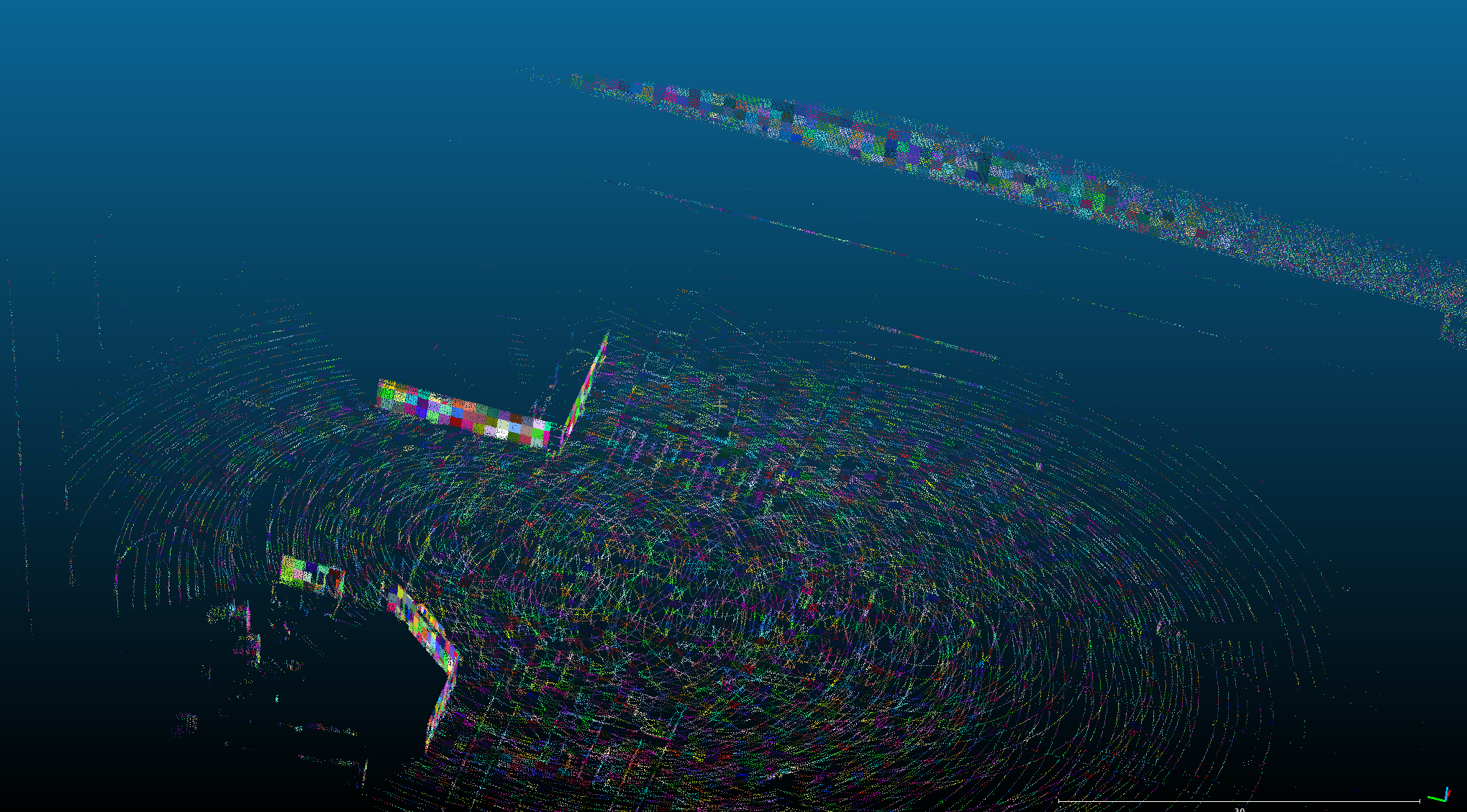
after calibration
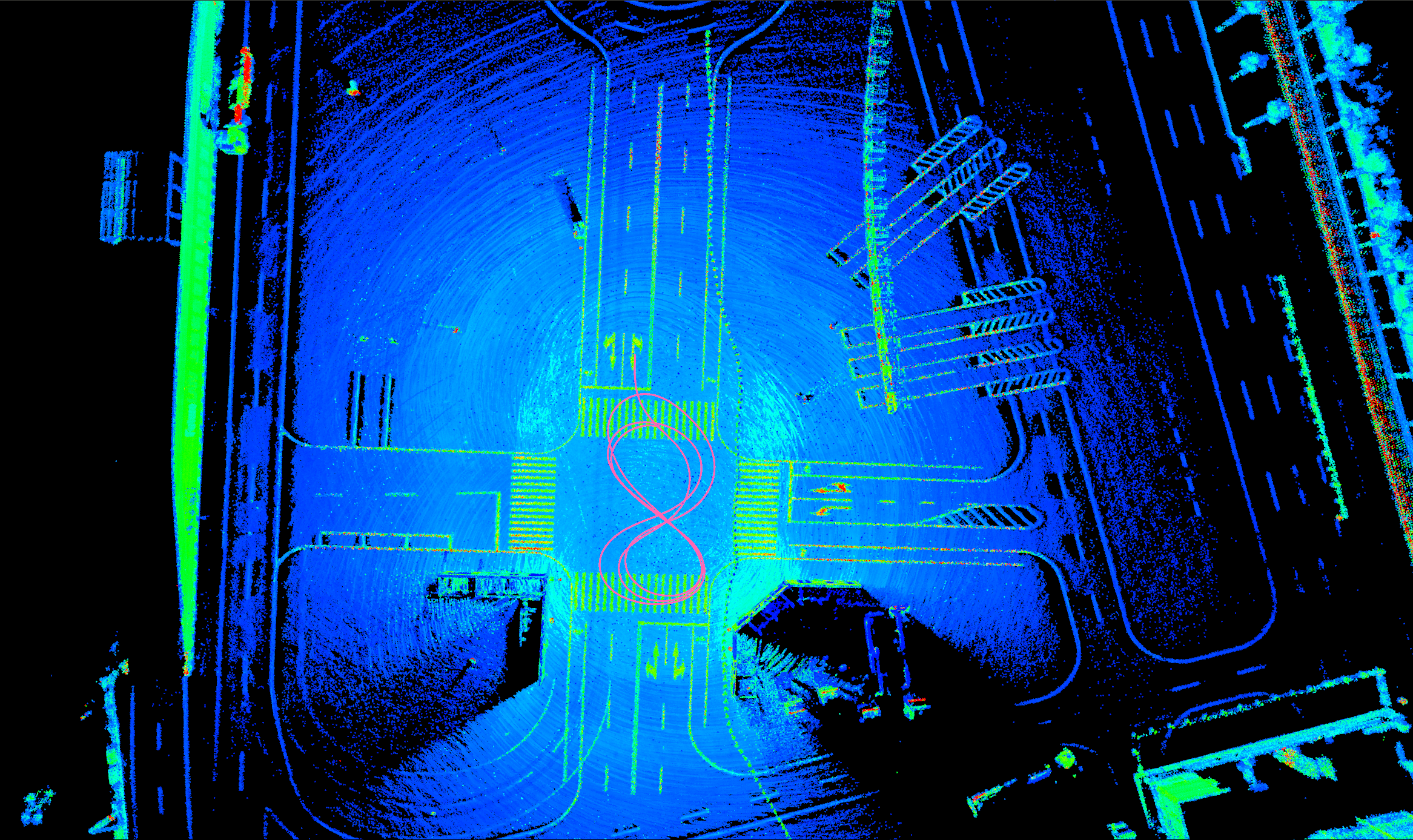
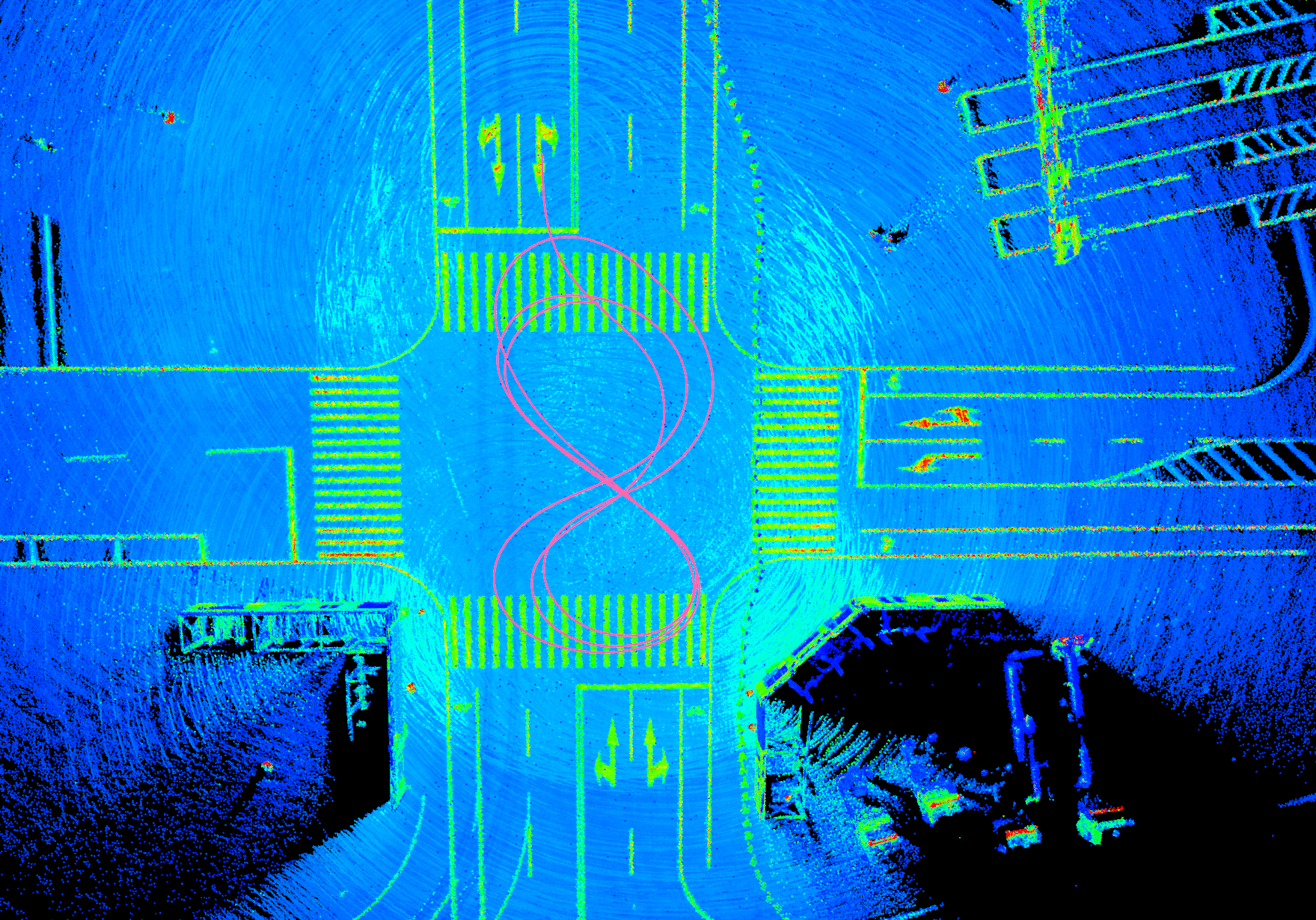
point cloud feature map: