我的Nano环境:
| item | 版本 |
|---|---|
| cuda | 10.2 |
| jetpack | 4.4 |
| tensorrt | 7.1.3 |
| torch&torchvision | 不需要 |
graph TB
数据集:将labelme格式转化为voc格式,将voc格式转化为yolo格式--> 根据train_and_export.ipynb训练并导出best.wts --> 在jetsonnano上gitclone_tensorrtx --> best.wts转化为best.engine --> 运行infer.py实时推理
git clone https://github.com/Promethe-us/DeployOnJetsonNano
里面有数据集转化的py文件
-
labelme打完标签的数据后是这样的:
-
运行 labelme2voc.py转成voc数据集
-
运行 voc2yolo.py文件转成yolo数据集
按照中的DeployOnJetsonNano/yolov5/tran_and_export.ipynb操作即可,得到 best.wts 文件下载到nano上
- 在jetsonnano上
!git clone https://github.com/wang-xinyu/tensorrtx.git 将best.wts放置在 tensorrtx/yolov5/下
-
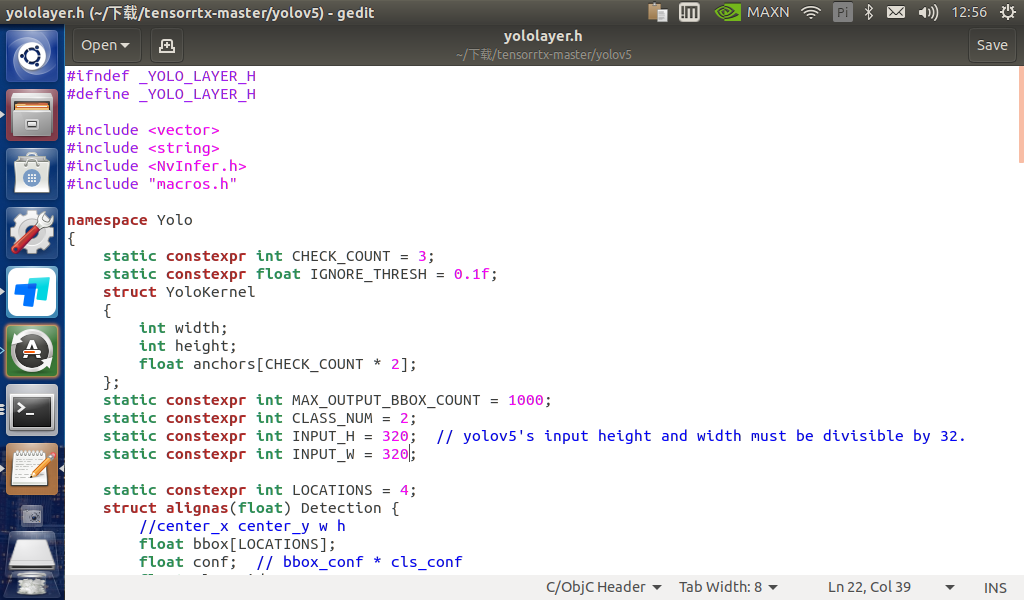
修改tensortx/yolov5/yololayer.h 的 CLASS_NUM、INPUT_H、INPUT_W
-
在tensortx/yolov5/下打开Terminal
mkdir build cd build cmake .. make转换为 best.engine
#在build目录下 sudo ./yolov5 -s ../best.wts ../best.engine s在yolov5目录下得到 best.engine
- Illegal instruction (core dumped) : https://blog.csdn.net/qiaoyurensheng/article/details/121711395?spm=1001.2101.3001.6661.1&utm_medium=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-1.pc_relevant_antiscanv2&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-2%7Edefault%7ECTRLIST%7ERate-1.pc_relevant_antiscanv2&utm_relevant_index=1
- no module named 'Pycuda': https://blog.csdn.net/wtlll/article/details/114264207
之前git clone了https://github.com/Promethe-us/DeployOnJetsonNano
将DeployOnJetsonNano/yolov5/infer.py 放到 nano的 tensorrtx/yolov5/下面
然后终端运行(USB摄像头,CSI摄像头改一下下infer.py即可)
python3 infer.py
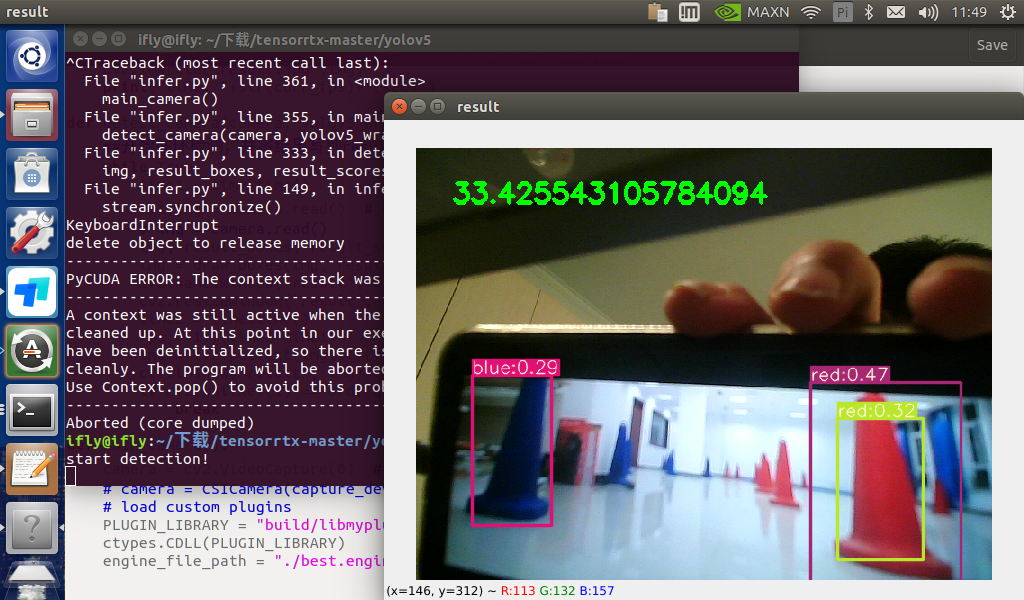
我选择的是 yolov5 v6.0 inputsize=(320,320)
没有tensorrt加速,帧率为20左右
经过加速(运行infer.py)结果如下:
环境信息:
| item | 版本 |
|---|---|
| cuda | 10.2 |
| jetpack | 4.4 |
| tensorrt | 7.1.3 |
| paddle | 2.2.2 |
详细流程我发在AIStudio上了:https://aistudio.baidu.com/aistudio/projectdetail/3795449?contributionType=1
使用ppyolo模型(tensorrt加速) 推理效果如下
