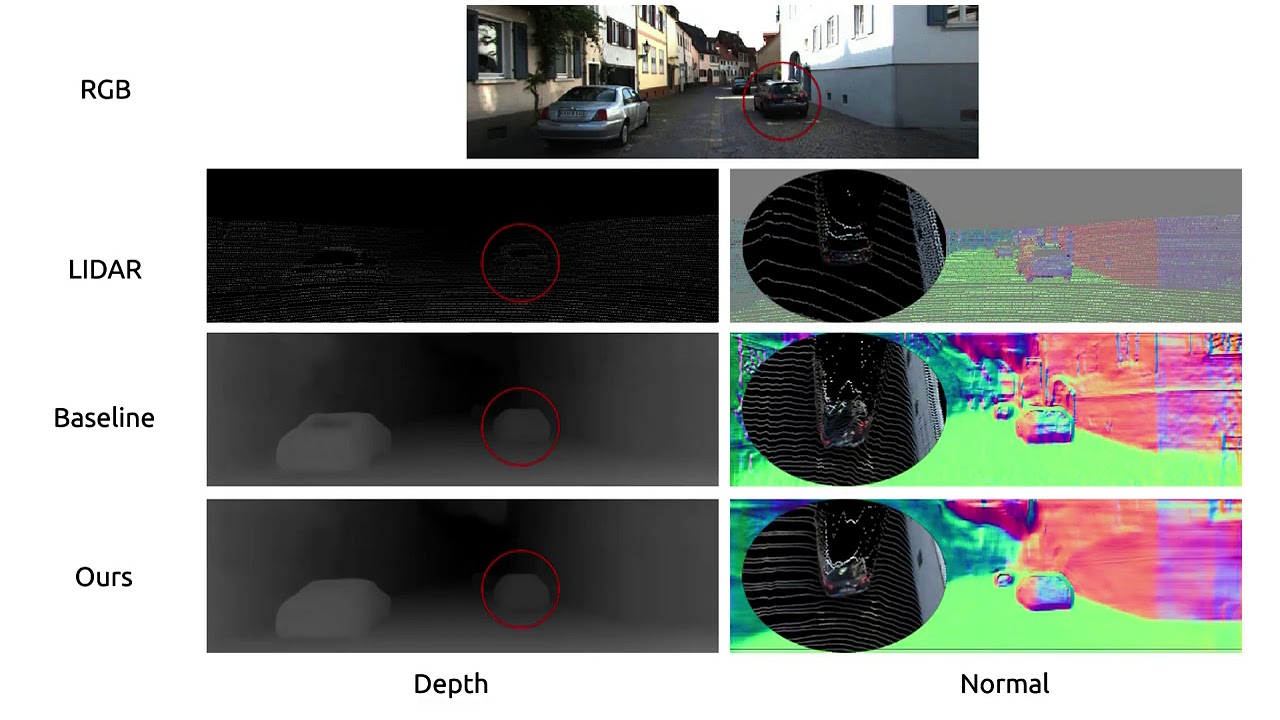
This is the official implementation of the paper: Monocular Depth Prediction Through Continuous 3D Loss. See arXiv version.
This repo is currently under heavy construction.
Video Demo:
Below is the readme information of the work Monodepth2, which the coding of this work is based on.
This is the reference PyTorch implementation for training and testing depth estimation models using the method described in
Digging into Self-Supervised Monocular Depth Prediction
Clément Godard, Oisin Mac Aodha, Michael Firman and Gabriel J. Brostow

This code is for non-commercial use; please see the license file for terms.
If you find our work useful in your research please consider citing our paper:
@article{monodepth2,
title = {Digging into Self-Supervised Monocular Depth Prediction},
author = {Cl{\'{e}}ment Godard and
Oisin {Mac Aodha} and
Michael Firman and
Gabriel J. Brostow},
booktitle = {The International Conference on Computer Vision (ICCV)},
month = {October},
year = {2019}
}
Assuming a fresh Anaconda distribution, you can install the dependencies with:
conda install pytorch=0.4.1 torchvision=0.2.1 -c pytorch
pip install tensorboardX==1.4
conda install opencv=3.3.1 # just needed for evaluationWe ran our experiments with PyTorch 0.4.1, CUDA 9.1, Python 3.6 and Ubuntu 18.04. We have also successfully trained models with PyTorch 1.0, and our code is compatible with Python 2.7.
You can predict depth for a single image with:
python test_simple.py --image_path assets/test_image.jpg --model_name mono+stereo_640x192On its first run this will download the mono+stereo_640x192 pretrained model (99MB) into the models/ folder.
We provide the following options for --model_name:
--model_name |
Training modality | Imagenet pretrained? | Model resolution | KITTI abs. rel. error | delta < 1.25 |
|---|---|---|---|---|---|
mono_640x192 |
Mono | Yes | 640 x 192 | 0.115 | 0.877 |
stereo_640x192 |
Stereo | Yes | 640 x 192 | 0.109 | 0.864 |
mono+stereo_640x192 |
Mono + Stereo | Yes | 640 x 192 | 0.106 | 0.874 |
mono_1024x320 |
Mono | Yes | 1024 x 320 | 0.115 | 0.879 |
stereo_1024x320 |
Stereo | Yes | 1024 x 320 | 0.107 | 0.874 |
mono+stereo_1024x320 |
Mono + Stereo | Yes | 1024 x 320 | 0.106 | 0.876 |
mono_no_pt_640x192 |
Mono | No | 640 x 192 | 0.132 | 0.845 |
stereo_no_pt_640x192 |
Stereo | No | 640 x 192 | 0.130 | 0.831 |
mono+stereo_no_pt_640x192 |
Mono + Stereo | No | 640 x 192 | 0.127 | 0.836 |
You can also download models trained on the odometry split with monocular and mono+stereo training modalities. Finally, we provide resnet 50 depth estimation models trained with ImageNet pretrained weights and trained from scratch.
You can download the entire raw KITTI dataset by running:
wget -i splits/kitti_archives_to_download.txt -P kitti_data/Then unzip with
cd kitti_data
unzip "*.zip"
cd ..Warning: it weighs about 175GB, so make sure you have enough space to unzip too!
Our default settings expect that you have converted the png images to jpeg with this command, which also deletes the raw KITTI .png files:
find kitti_data/ -name '*.png' | parallel 'convert -quality 92 -sampling-factor 2x2,1x1,1x1 {.}.png {.}.jpg && rm {}'or you can skip this conversion step and train from raw png files by adding the flag --png when training, at the expense of slower load times.
The above conversion command creates images which match our experiments, where KITTI .png images were converted to .jpg on Ubuntu 16.04 with default chroma subsampling 2x2,1x1,1x1.
We found that Ubuntu 18.04 defaults to 2x2,2x2,2x2, which gives different results, hence the explicit parameter in the conversion command.
You can also place the KITTI dataset wherever you like and point towards it with the --data_path flag during training and evaluation.
Splits
The train/test/validation splits are defined in the splits/ folder.
By default, the code will train a depth model using Zhou's subset of the standard Eigen split of KITTI, which is designed for monocular training.
You can also train a model using the new benchmark split or the odometry split by setting the --split flag.
Custom dataset
You can train on a custom monocular or stereo dataset by writing a new dataloader class which inherits from MonoDataset – see the KITTIDataset class in datasets/kitti_dataset.py for an example.
By default models and tensorboard event files are saved to ~/tmp/<model_name>.
This can be changed with the --log_dir flag.
Monocular training:
python train.py --model_name mono_modelStereo training:
Our code defaults to using Zhou's subsampled Eigen training data. For stereo-only training we have to specify that we want to use the full Eigen training set – see paper for details.
python train.py --model_name stereo_model \
--frame_ids 0 --use_stereo --split eigen_fullMonocular + stereo training:
python train.py --model_name mono+stereo_model \
--frame_ids 0 -1 1 --use_stereoThe code can only be run on a single GPU.
You can specify which GPU to use with the CUDA_VISIBLE_DEVICES environment variable:
CUDA_VISIBLE_DEVICES=2 python train.py --model_name mono_modelAll our experiments were performed on a single NVIDIA Titan Xp.
| Training modality | Approximate GPU memory | Approximate training time |
|---|---|---|
| Mono | 9GB | 12 hours |
| Stereo | 6GB | 8 hours |
| Mono + Stereo | 11GB | 15 hours |
Add the following to the training command to load an existing model for finetuning:
python train.py --model_name finetuned_mono --load_weights_folder ~/tmp/mono_model/models/weights_19Run python train.py -h (or look at options.py) to see the range of other training options, such as learning rates and ablation settings.
To prepare the ground truth depth maps run:
python export_gt_depth.py --data_path kitti_data --split eigen
python export_gt_depth.py --data_path kitti_data --split eigen_benchmark...assuming that you have placed the KITTI dataset in the default location of ./kitti_data/.
The following example command evaluates the epoch 19 weights of a model named mono_model:
python evaluate_depth.py --load_weights_folder ~/tmp/mono_model/models/weights_19/ --eval_monoFor stereo models, you must use the --eval_stereo flag (see note below):
python evaluate_depth.py --load_weights_folder ~/tmp/stereo_model/models/weights_19/ --eval_stereoIf you train your own model with our code you are likely to see slight differences to the publication results due to randomization in the weights initialization and data loading.
An additional parameter --eval_split can be set.
The three different values possible for eval_split are explained here:
--eval_split |
Test set size | For models trained with... | Description |
|---|---|---|---|
eigen |
697 | --split eigen_zhou (default) or --split eigen_full |
The standard Eigen test files |
eigen_benchmark |
652 | --split eigen_zhou (default) or --split eigen_full |
Evaluate with the improved ground truth from the new KITTI depth benchmark |
benchmark |
500 | --split benchmark |
The new KITTI depth benchmark test files. |
Because no ground truth is available for the new KITTI depth benchmark, no scores will be reported when --eval_split benchmark is set.
Instead, a set of .png images will be saved to disk ready for upload to the evaluation server.
External disparities evaluation
Finally you can also use evaluate_depth.py to evaluate raw disparities (or inverse depth) from other methods by using the --ext_disp_to_eval flag:
python evaluate_depth.py --ext_disp_to_eval ~/other_method_disp.npy📷📷 Note on stereo evaluation
Our stereo models are trained with an effective baseline of 0.1 units, while the actual KITTI stereo rig has a baseline of 0.54m. This means a scaling of 5.4 must be applied for evaluation.
In addition, for models trained with stereo supervision we disable median scaling.
Setting the --eval_stereo flag when evaluating will automatically disable median scaling and scale predicted depths by 5.4.
We include code for evaluating poses predicted by models trained with --split odom --dataset kitti_odom --data_path /path/to/kitti/odometry/dataset.
For this evaluation, the KITTI odometry dataset (color, 65GB) and ground truth poses zip files must be downloaded. As above, we assume that the pngs have been converted to jpgs.
If this data has been unzipped to folder kitti_odom, a model can be evaluated with:
python evaluate_pose.py --eval_split odom_9 --load_weights_folder ./odom_split.M/models/weights_29 --data_path kitti_odom/
python evaluate_pose.py --eval_split odom_10 --load_weights_folder ./odom_split.M/models/weights_29 --data_path kitti_odom/You can download our precomputed disparity predictions from the following links:
| Training modality | Input size | .npy filesize |
Eigen disparities |
|---|---|---|---|
| Mono | 640 x 192 | 343 MB | Download 🔗 |
| Stereo | 640 x 192 | 343 MB | Download 🔗 |
| Mono + Stereo | 640 x 192 | 343 MB | Download 🔗 |
| Mono | 1024 x 320 | 914 MB | Download 🔗 |
| Stereo | 1024 x 320 | 914 MB | Download 🔗 |
| Mono + Stereo | 1024 x 320 | 914 MB | Download 🔗 |
Copyright © Niantic, Inc. 2019. Patent Pending. All rights reserved. Please see the license file for terms.