项目包含车辆横向控制相关算法的分析.
- numpy
- control
- matplotlib
基于非时间的参考的路径跟踪方法[Vehicle SMC Analysis (none-time reference)]最早应用于机器人的路径跟踪系统,通过引入非时间参考量代替时间参考量,解决传统路径跟踪方法中将期望轨迹视为时间函数的问题。 该方法选择移动机器人实际路径在某参考系下的x 轴投影作为非时间参考量。
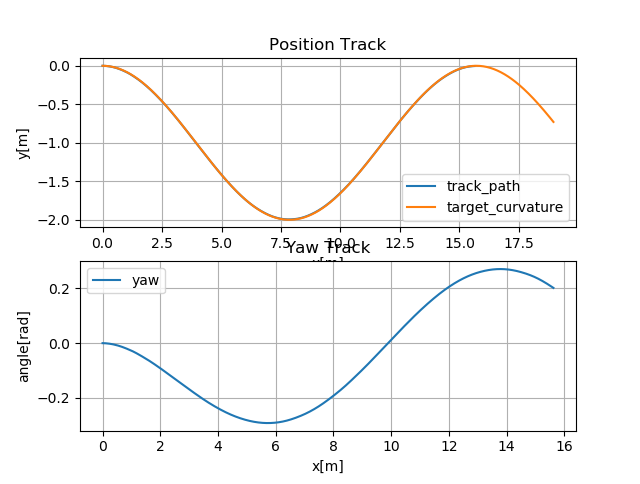
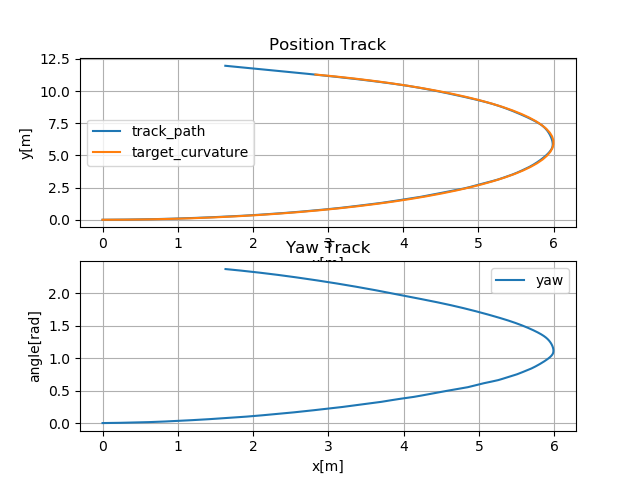
根据如下控制系统框图,搭建仿真环境。
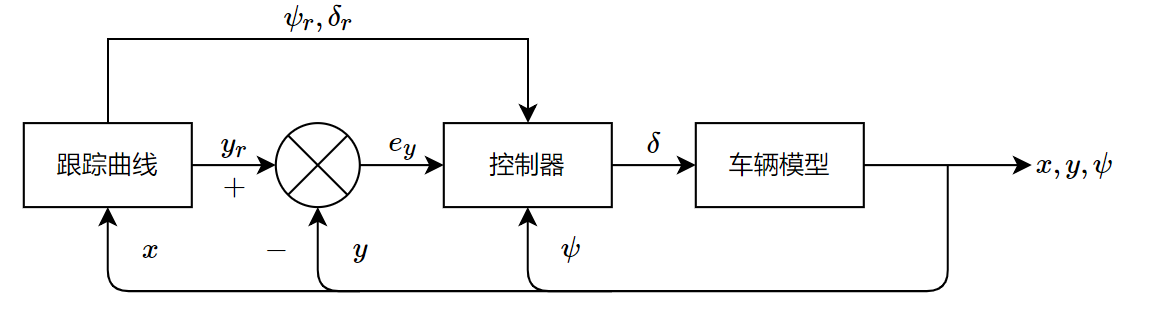


待补充
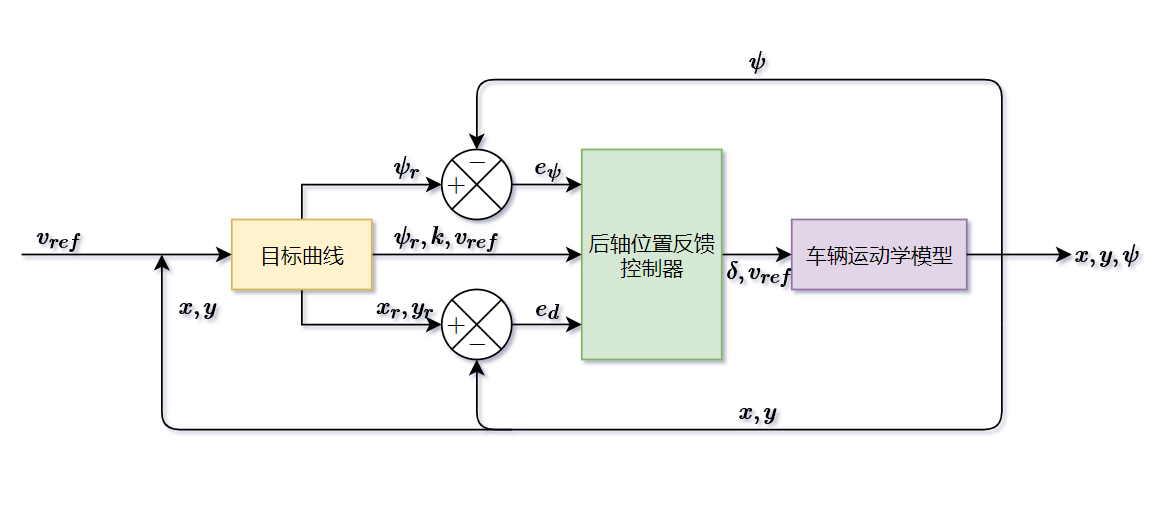
仿真框图如上,基于上述框图搭建仿真环境。
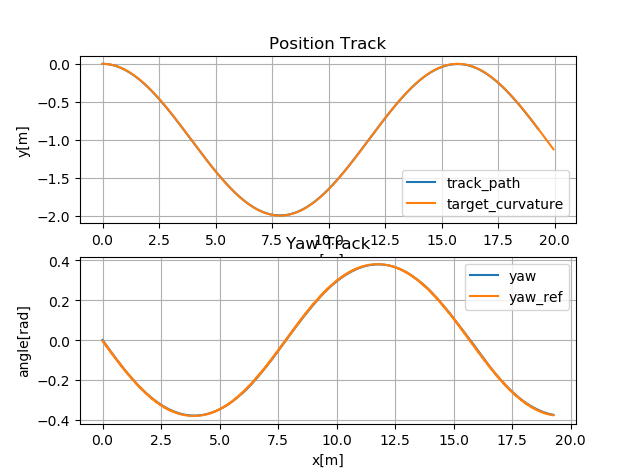
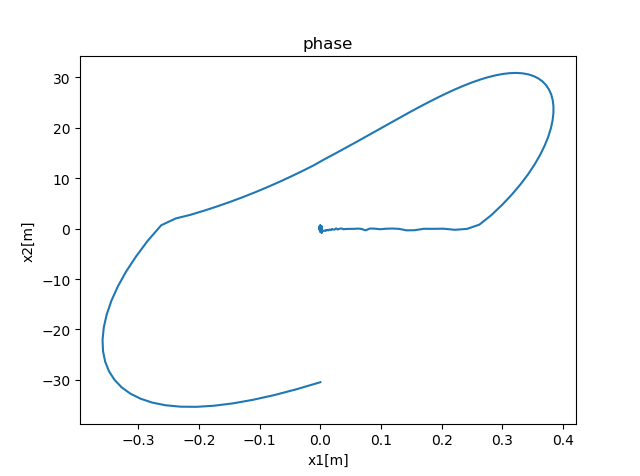
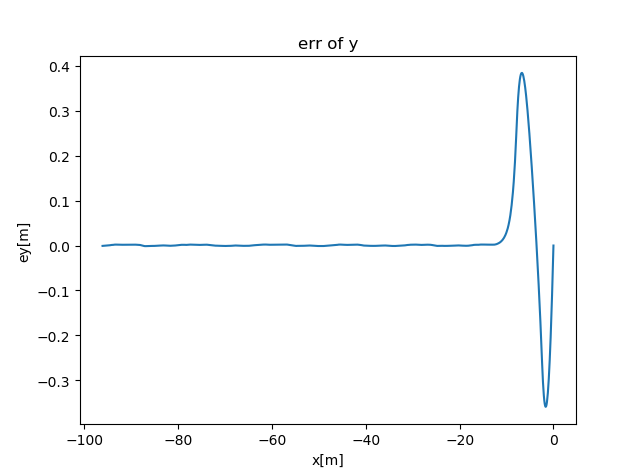
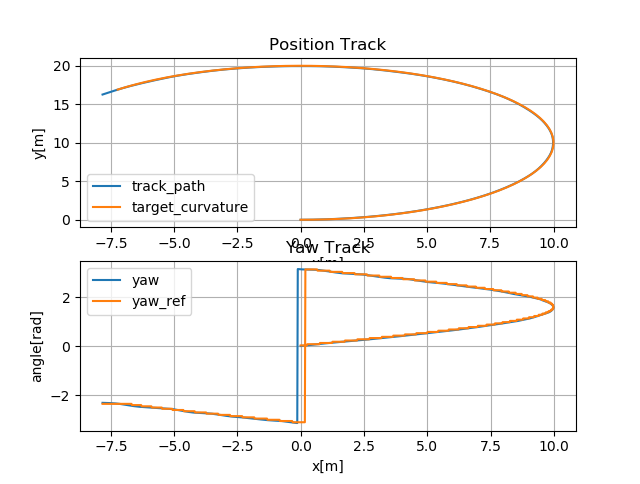
上图可知,跟踪效果很好。
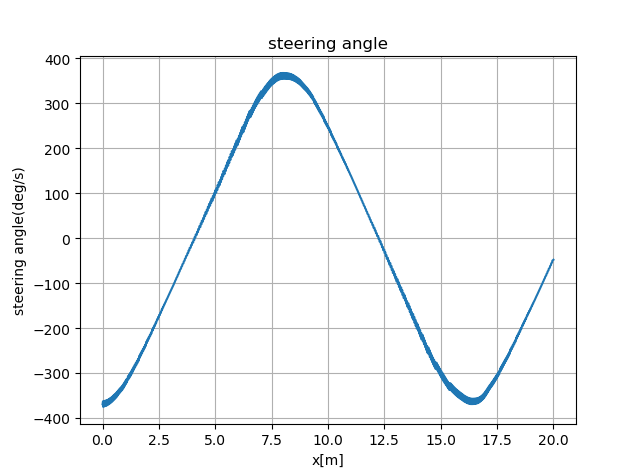
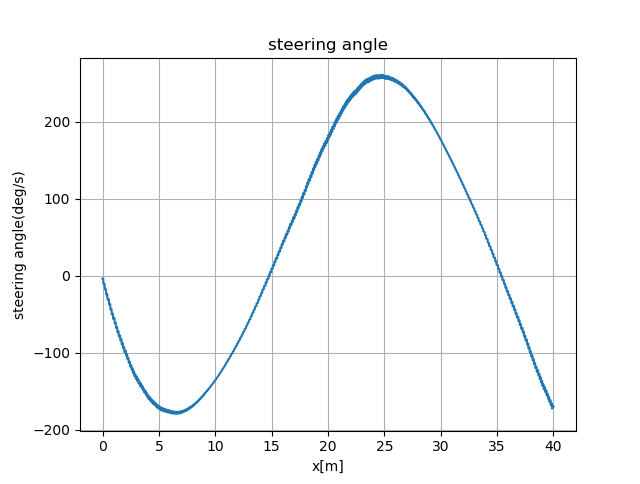
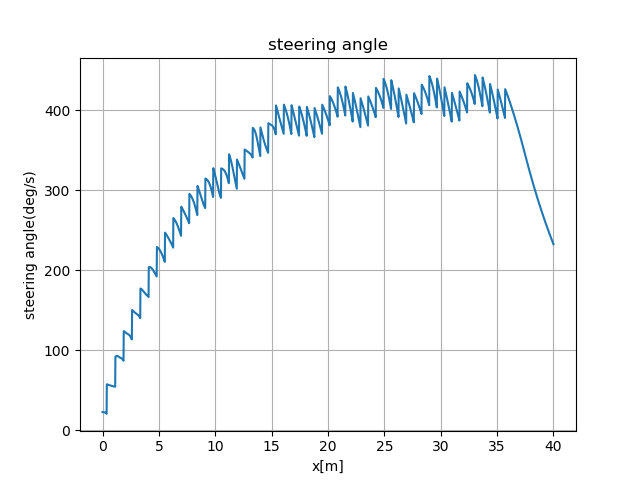
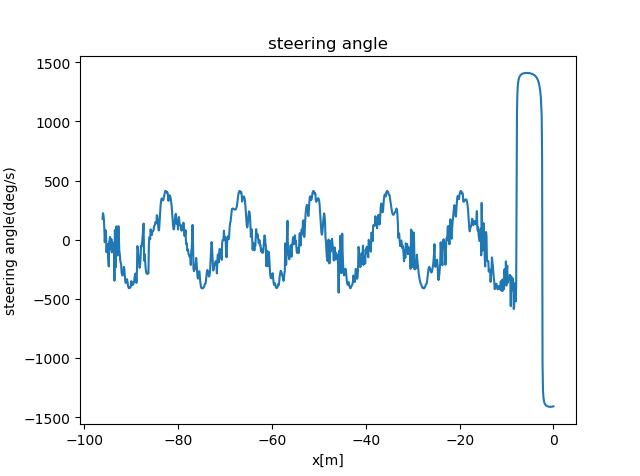
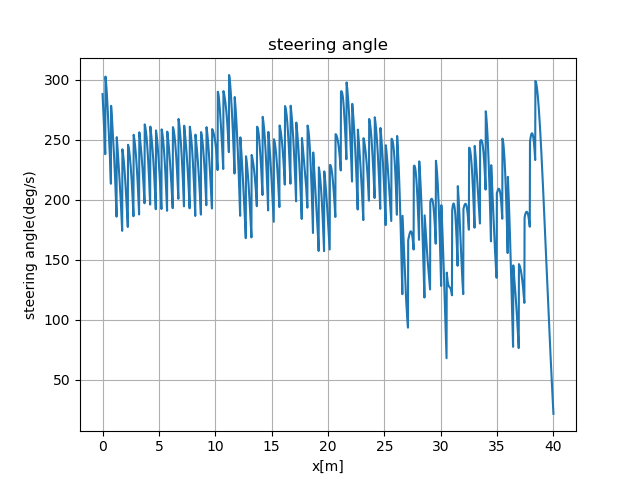
输出控制抖动也较小。
基于Stanley的跟踪方法